
无刷直流电机闭环调速实验装置的建模与仿真
2017-04-25 03:47聂晓华
实验技术与管理 2017年4期
聂晓华, 王 薇
(南昌大学 信息工程学院, 江西 南昌 330031)
实验课程改革
无刷直流电机闭环调速实验装置的建模与仿真
聂晓华, 王 薇
(南昌大学 信息工程学院, 江西 南昌 330031)
以无刷直流电机闭环调速实验装置为研究对象,分析了无刷直流电机控制特性,结合传感器技术给出了转速单闭环和转速电流双闭环2种调速控制策略,分别建立了2种调速系统的Simulink模型并进行了仿真比较。结果显示:2种调速系统都具有良好的动态响应和抗扰动性能。在突加负载的情况下,双闭环调速系统比单闭环调速系统对电流转矩的响应更快且波动超调较小,虽然电机转速落差较大,但总体性能较优。
无刷直流电机; 闭环调速; Simulink仿真
现在,节能环保、方便快捷的电力驱动的各类电动交通工具(例如电动自行车、电动汽车等)得到了越来越广泛的应用[1-3]。电动汽车的电机控制系统具有响应快、可靠性高、调速范围宽、控制精度高的特点。电动汽车的电机控制系统主要包括有刷直流电机系统、感应电机系统、开关磁阻电机系统、永磁无刷直流电机系统。其中永磁无刷直流电机既具备交流电机结构简单、运行可靠等一系列优点,又具备直流电机运行效率高、调速范围宽且调速方法简单的优点,成为低速电动助力车的主流驱动电机[4-6]。本文对永磁无刷直流电机调速系统实验装置进行了研究[7-8],基于传感器技术提出了一种速度单闭环和一种转速电流双闭环的控制策略,利用Matlab仿真软件中的SimPowerSystems[9-10]库,分别建立了2种调速系统的Simulink模型,通过仿真比较了2种控制策略的优缺点。
1 无刷直流电机转速单闭环调速系统
1.1 无刷直流电机转速单闭环控制策略
无刷直流电机转子由永磁体构成,省略了用于换相的电刷结构,定子部分为电枢绕组,需要通过驱动电路在电枢上通过相对应的电流,以产生磁场使电机转动。驱动电路由电子开关器件组成,用于控制电机定子上各相绕组通电的顺序和时间,其开关规律根据位置传感器检测到的转子位置而改变[8]。
1.1.1 无刷直流电机的调速方法
无刷直流电机的调速方法与传统直流电机的调速方法相似,直流电机的稳态转速为[9]
(1)
式中:n为转速(r/min),U为电枢电压(V),I为电枢电流(A),R为电枢回路总电阻(Ω),Ke为电动势常数,Ф为励磁磁通(Wb)。
无刷直流电机励磁为永磁体。由式(1)可知,无刷直流电机的调速方式有调整电枢供电电压调速和更改电枢回路电阻调速。其中改变电枢回路电阻调速一般是在电枢回路中串入电阻,通过电阻分压,电机进行有级调速,损耗很大,只能用于少数小功率场合;调整电枢供电电压U可以平滑地调节转速n,主要用于在一定转速范围内需要平滑调速的系统。调压调速也是无刷直流电机调速系统的主要调速方式[9-11]。
1.1.2 无刷直流电机转速单闭环控制方法
转速单闭环反馈控制无刷直流电机调速系统结构如图1所示。闭环系统由电子换向器件、电机本体、速度控制器、霍尔传感器以及逻辑换向电路构成。系统运行时,将给定转速(控制信号)和电机实际转速(反馈信号)之偏差信号输入速度控制器,用速度控制器的输出信号控制三相逆变桥电路中的直流电压,由逻辑换相器件产生的信号作为触发脉冲,控制三相逆变桥电路,使电机内对应的绕组通电,最终达到调速的目的。
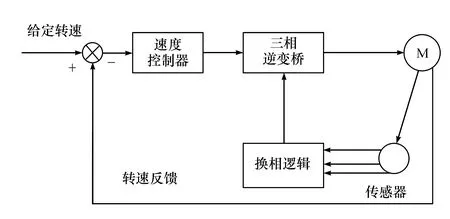
图1 无刷直流电机单闭环调速系统
转速闭环调速系统是基本的反馈控制系统,采用比例积分调节,特点是:
(1) 无静差调速;
(2) 跟随给定量,抑制系统通道内的扰动;
(3) 系统精度由反馈检测的精度决定,系统对电源和检测装置中的扰动无法抑制[11-12]。
1.2 无刷直流电机单闭环调速系统仿真模型
SimPowerSystems库是在Simulink环境下进行电力、电子系统建模和仿真的先进工具,它为电路、电力电子系统,电机系统,发电、输变电系统和配电的计算提供了强有力的支撑,支持对控制系统的设计。
无刷直流电机转速单闭环调速控制系统仿真模型如图2所示。仿真对象为一台额定功率1 kW、额定电压500 V、额定转速3 000 r/min的无刷直流电机。系统由可调直流电压源供电,要求电机控制系统具有较快的启动速度和良好的抗干扰能力。
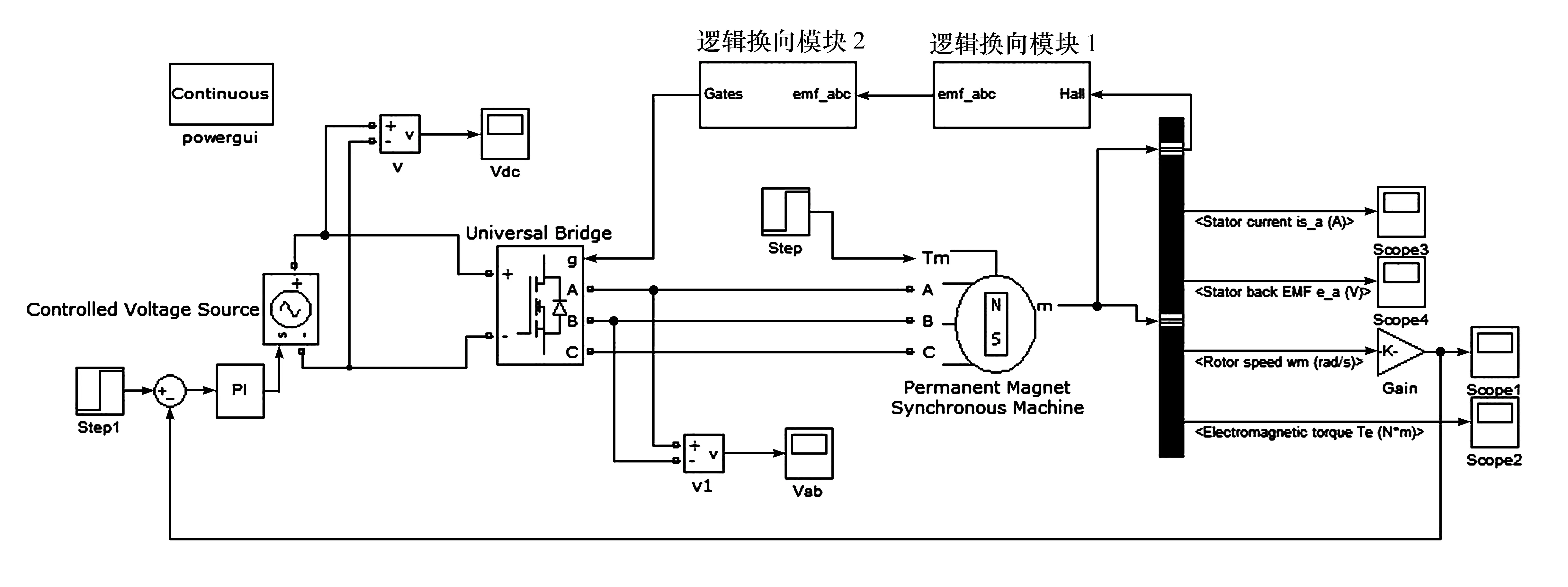
图2 无刷直流电机转速单闭环调速控制系统仿真模型
电源变换模块采用升压斩波器,直流电压为200 V,电感0.5 mH,触发脉冲为10 kHz,占空比60%,RC振荡电路中R=50 Ω,C=3 μF。
在Simulink中并没有独立的无刷直流电机模型,而无刷直流电机实质上就是一种特殊的永磁同步电机,故可以采用永磁同步电机代替。因永磁同步电机的气隙磁场和感应电动势均为梯形波,所以也被称为梯形波/方波永磁同步电机。系统包括的主要元件有PI调节器、可控电压源、三相逆变桥、逻辑换相电路和无刷直流电机本体。
逻辑换相电路模块1的模型与逻辑功能如图3和表1所示;逻辑换相电路模块2的模型与逻辑功能如图4和表2所示。其中ha、hb、hc为霍尔传感器的霍尔信号,emf_a、emf_b、emf_c为三相反电动势信号,Q1—Q6为逆变桥功率开关管的导通信号。
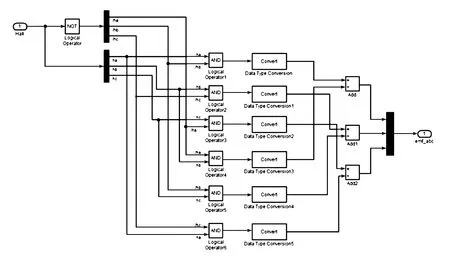
图3 逻辑换相模块1模型
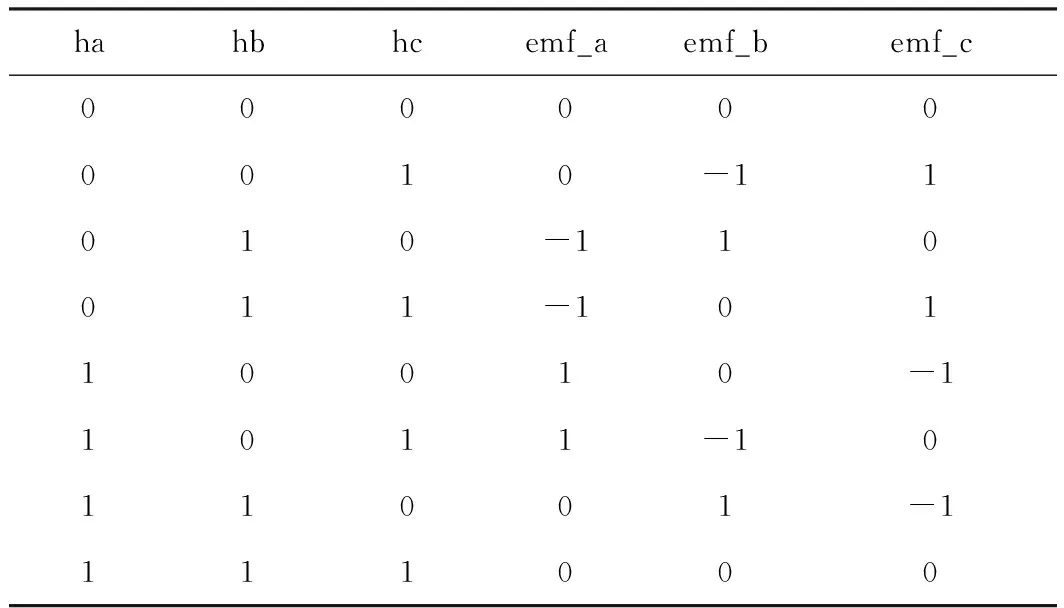
表1 逻辑换相模块1逻辑功能

图4 逻辑换相模块2模型

emf_aemf_bemf_cQ1Q2Q3Q4Q5Q60000000000-11000110-110011000-10101001010-11000011-1010010001-1001001
2 无刷直流电机转速电流双闭环调速系统
2.1 无刷直流电机转速电流双闭环控制策略
转速电流双闭环反馈控制无刷直流电机调速系统结构如图5所示。从图5可以看出,转速和电流2种负反馈起作用,且电流环为内环,转速环为外环。运行时,给定转速与电机实际转速之差的偏差信号输入速度控制器,控制系统通过传感器从电机中获得转子的位置信息,再将该信息输入参考电流模块,结合转速控制器的输出信号形成电机的每相参考电流。形成的每相参考电流与反馈的电机每相实际电流一起输入电流滞环控制器中,通过电流滞环的方式生成三相逆变桥式电路控制脉冲PWM波。
电流内环采用滞环控制方式,可以限制最大电流,并使系统有足够大的加速转矩,保证系统的稳定运行。转速外环采用PI调节器控制,保证系统的转速动态跟随性能,对负载变化起抗干扰作用,且可以消除静差,保证调速系统的稳定与高性能。
2.2 无刷直流电机双闭环调速系统仿真模型
无刷直流电机转速电流双闭环调速系统仿真模型如图6所示。仿真对象同样为一台额定功率1 kW、额定电压500 V、额定转速3 000 r/min的无刷直流电机。
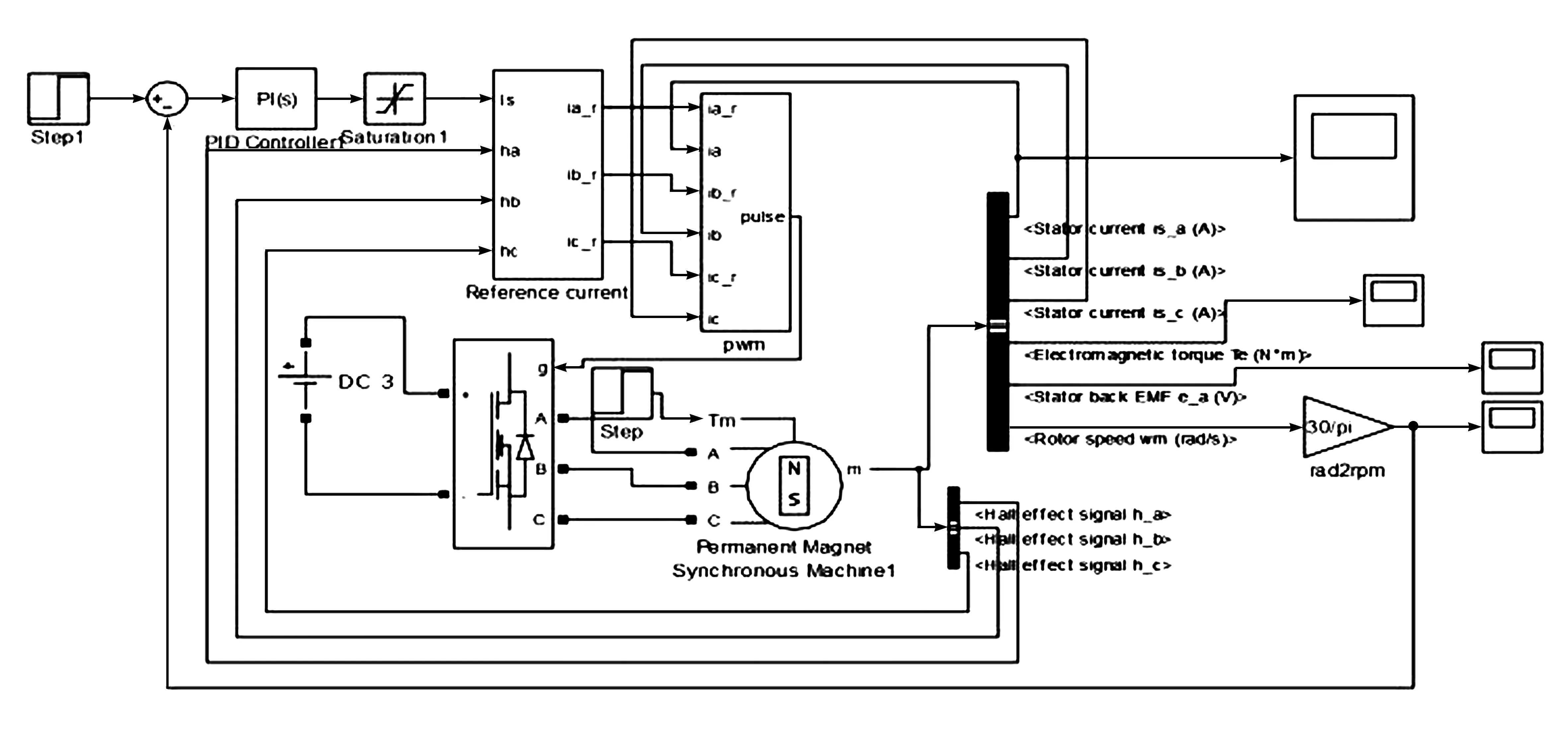
图6 无刷直流电机双闭环调速系统仿真模型
从图6可以看出,系统主要包括PI调节器、参考电流模块、电流滞环控制器模块、三相逆变桥和无刷直流电机本体。其中PI调节器即为转速调节器,输入为给定转速和时间转速的差值,输出为三相参考电流的电流幅值;而Saturation饱和限幅模块的作用是将输出的三相参考相电流的幅值限定在要求范围内。
参考电流模块是通过霍尔传感器提供的位置信息与电流幅值Is信号来得到三相参考电流,该功能通过S-function模块编程实现。霍尔传感器信号与三相参考电流之间的对应关系如表3所示。
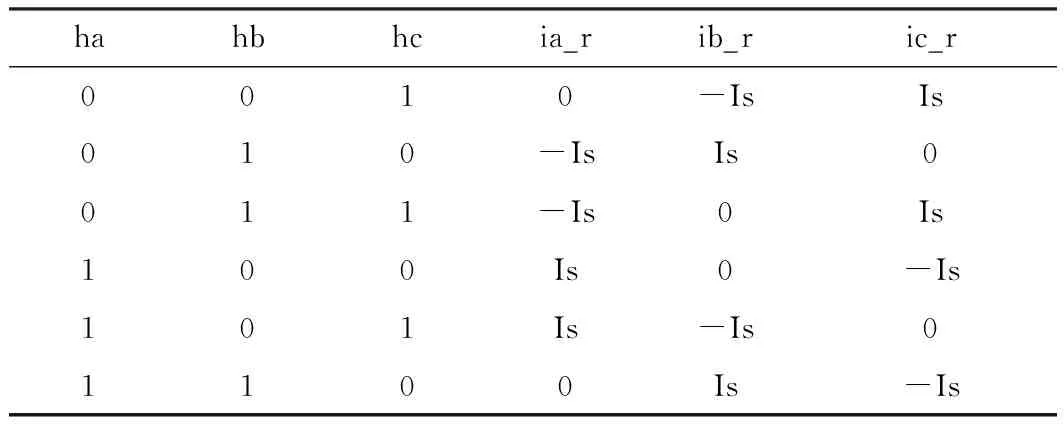
表3 霍尔传感器信号和三相参考电流对应关系表
电流滞环控制器模块如图7所示,这是一种电流闭环控制方法,可以实现电流滞环跟踪PWM控制。它的输入为三相参考电流和三相实际电流,输出为三相逆变桥的控制信号。当三相参考电流大于三相实际电流且两者之差大于relay模块(滞环比较器)的环宽时,对应相正向导通、负向关断;当三相实际电流大于三相参考电流且2者之差大于relay模块的环宽时,对应相正向关断、负向导通。

图7 电流滞环控制器模块结构图
电流跟踪控制的精度与滞环的环宽有关,同时还受到功率开关器件允许开关频率的制约。当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增加了。所以应在充分利用器件开关频率的前提下,正确地选择尽可能小的环宽。
3 仿真结果
仿真时间为0.3 s,电机从零转速启动,给定的初始速度为2 000 r/min;在0.08 s时,使电机提速至2 500 r/min;在0.15 s时给电机加一个10 N·m的恒定负载,观察电机的启动过程、提速过程以及系统的抗扰动性能。
图8—图11分别为无刷直流电机的转速响应、转矩响应、A相电流、A相反电势在2种控制方式下的仿真结果对比。
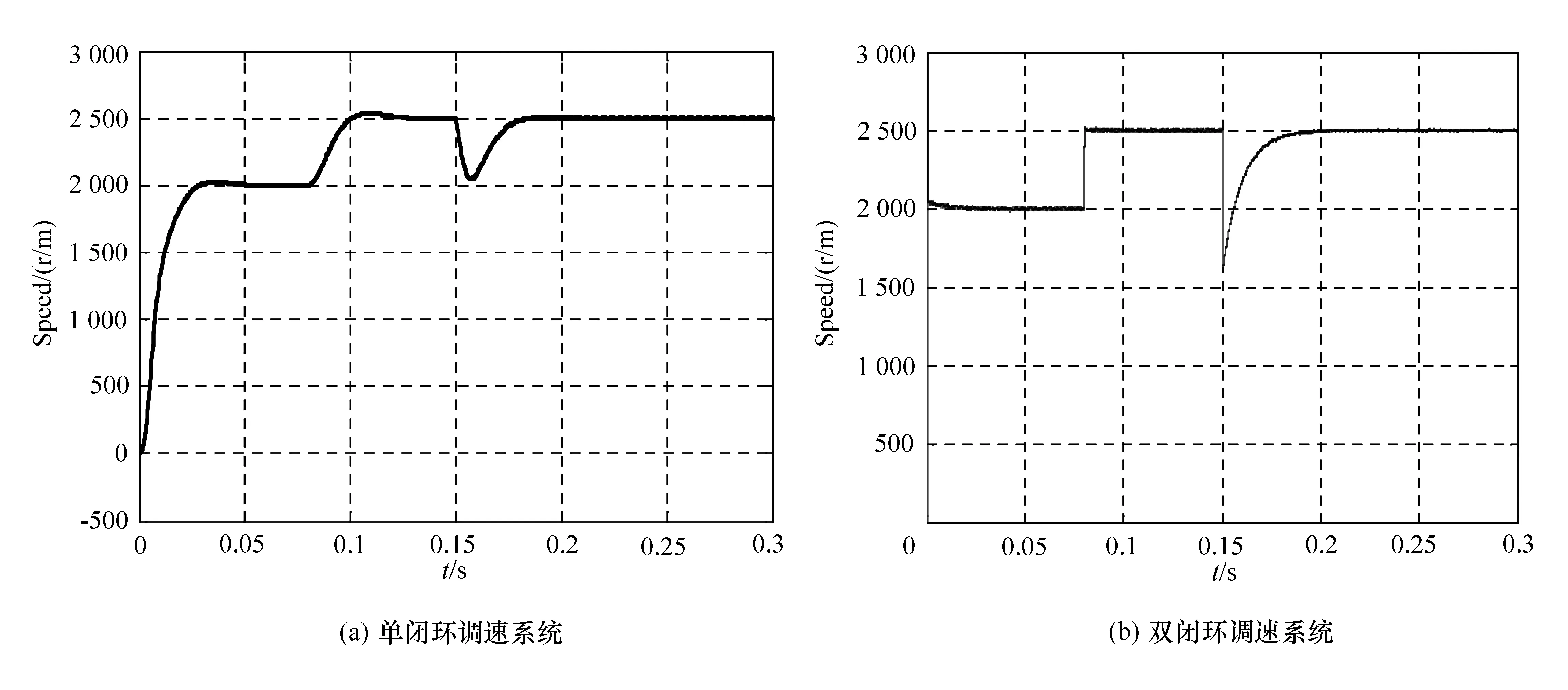
图8 转速响应曲线
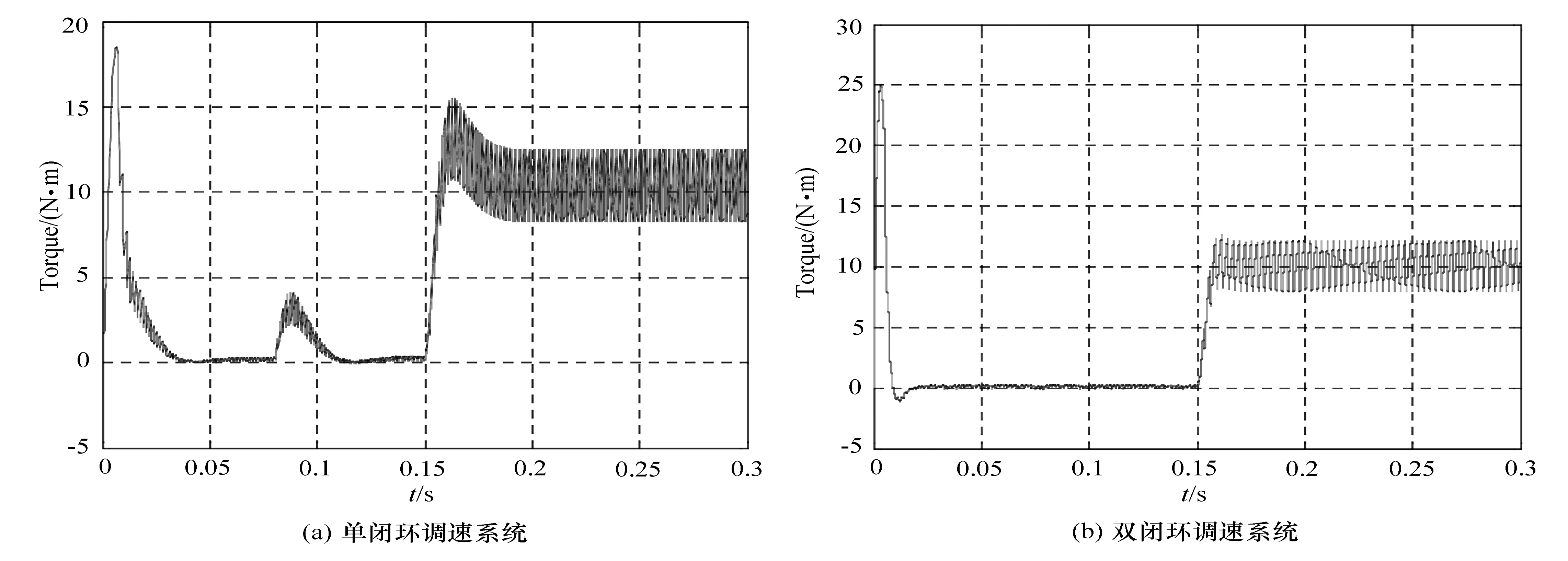
图9 转矩响应曲线

图10 A相电流波形

图11 单闭环调速系统A相反电势波形
从转速响应曲线图8和转矩响应曲线图9可以看出,2种调速系统均能满足稳定性要求和快速响应性要求,但还是略有不同。
由图8可知,单闭环调速系统在电机启动后0.03 s转速稳定为2 000 r/min,最大超调量为21 r/min。在0.08 s给控制信号提速到2 500 r/min,0.12 s时电机转速稳定在2 500 r/min。0.15 s加一个恒定10 N·m的负载转矩,电机在0.18 s恢复2 500 r/min的转速。而双闭环系统在电机启动后转速更快地稳定为2 000 r/min,在0.08 s给控制信号后,0.09 s电机转速就稳定在了2 500 r/min。0.15 s时突加一个恒定10 N·m的负载转矩,电机在0.18 s恢复为2 500 r/min的稳定状态,且无静差。但是,突加负载时电机的转速突降到1 700 r/min,比单环调速系统的2 000 r/min要下降许多。可见,双闭环调速系统的转速响应要快于单闭环调速系统,但是在突加负载时双闭环调速系统的电机转速下降较多。2种调速系统的转速都能够满足快速响应的要求,并且抗扰性能良好,外部施加扰动时,能迅速恢复扰动前的状态。
由图9和图10可知,在启动阶段,产生了较大的转矩和电流冲击,但系统稳定后,两个调速系统都得到了比较理想的响应曲线。但是在0.08 s转速突加至2 500 r/min时,单闭环调速系统的转矩和电流有较大的波动,而双闭环调速系统的转矩与电流波动较小。突加负载时,双闭环调速系统的转矩和电流跟随给定的效果都要强于单闭环系统。
由图11可知,2种调速系统A相反电势电压波形都比较平稳,均达到快速响应和抗扰动的性能要求。
综上,转速电流双闭环调速系统能保证转矩和转速都跟随给定,速度单闭环调速系统能保证转速输出,但是转矩精度要差些。在实际应用中,直流电动车会经常面临启动、加速、负荷、爬坡、频繁启停等复杂工况,这时对转矩跟随精度要求更高,双闭环的调速系统更符合要求。
4 结论
通过Simulink仿真结果表明,转速电流双闭环调速系统在转速、转矩、电流的响应速率和跟随性能方面要优于速度单闭环调速系统,并且在负载转矩有较大波动时,效果尤为明显。仿真结果证明了2种调速系统都能达到快速响应和抗扰动的性能要求。
References)
[1] 吴正斌,胡坚耀,李程宇.低速电动汽车的性能研究[J].集成技术,2015(1):8-15.
[2] 李春涛.电动汽车用永磁无刷直流电机调速控制器研究[D].合肥:合肥工业大学,2013.
[3] 夏长亮.无刷直流电动机控制系统[M].北京:科学出版社,2009.
[4] 陈亮,盛占石,刘钢,等.低速电动车用双永磁无刷直流电机协调控制的研究[J].微电机,2013(3):38-41.
[5] 张硕,高大威,周晓敏.低速电动汽车电机驱动系统性能研究[C]//2014中国汽车工程学会年会论文集.2014:86-89.
[6] 舒雄,杜荣华,柴键,等.电动汽车用无刷直流电机控制器设计[J].西华大学学报(自然科学版),2015(3):58-63.
[7] 纪志成,沈艳霞,姜建国.基于Matlab无刷直流电机系统仿真建模的新方法[J].系统与仿真学报,2003,15(12):1745-1749.
[8] 张克涵,狄正飞,刘晓强,等.基于Matlab无刷直流电机双闭环调速系统仿真研究[J].微电机,2015(2):44-48.
[9] 周渊深.交直流调速系统与MATLAB仿真[M].北京:中国电力出版社,2007.
[10] 王晶,翁国庆,张有兵.电力系统的MATLAB/SIMULINK仿真与应用[M].西安:西安电子科技大学出版社,2008.
[11] 阮毅,陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2010.
[12] 陈运华,高凤岐,王广龙.直流无刷电动机控制器设计与仿真[J].计算机仿真,2012,29(11):239-242.
Modeling and simulation of electric brushless DC motor closed-loop control experimental system
Nie Xiaohua, Wang Wei
(School of Information Engineering, Nanchang University,Nanchang 330031, China)
Taking low-speed electric motor brushless DC motor speed control system as the research object,based on the analysis on characteristics of brushless DC motor control,combined with sensor technology, two kinds of speed regulation control strategies including the speed single-loop and speed and current dual-loop are proposed. The Simulink model of the two kinds of brushless DC motor speed control systems are established and simulated. The simulation results show that the two systems both have good dynamic response and disturbance rejection performance. In the process of adding load condition,the dual-loop system response speed is faster than the single-loop system in the electrical transfer torque. And the volatility overshoot of the dual-loop system is smaller than the single-loop,but the speed gap is larger. Compared with the single-loop speed control system,the performance of the dual-loop speed control system on the whole is more superior.
brushless DC motor; closed-loop speed control; Simulink simulation
10.16791/j.cnki.sjg.2017.04.048
2016-10-13 修改日期:2016-12-03
国家自然科学基金项目(51467013)
聂晓华(1969—),男,河北邢台,博士,副教授,硕士研究生导师,主要研究方向为电气信息系统、系统辨识与状态估计.
G642.0
A
1002-4956(2017)4-0189-06
猜你喜欢
大电机技术(2022年5期)2022-11-17
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
黑龙江电力(2017年1期)2017-05-17
电子制作(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
系统工程学报(2015年2期)2015-02-28
