
基于DSP的压电电机的驱动系统性能测试与分析*
2017-04-27 07:30张铁民廖贻泳许志林李晟华
振动、测试与诊断 2017年2期
张铁民, 廖贻泳, 许志林, 李晟华, 梁 莉
(华南农业大学工程学院 广州,510642)
基于DSP的压电电机的驱动系统性能测试与分析*
张铁民, 廖贻泳, 许志林, 李晟华, 梁 莉
(华南农业大学工程学院 广州,510642)
针对高端制造装备对大行程、高精度直线运动机构的广泛需求,研究集宏微运动于一体的新型直线压电电机,提出交流宏驱动和直流微驱动两种工作模式,建立集宏微两种驱动方式于一体的驱动系统。驱动系统输出两相交流电压,相位-90~90°、频率10~60 kHz、电压幅值0~400 V之间连续可调,输出直流电压在0~400 V动态可调,实现了交直流电压无缝转换。系统以TI公司提供的DSP28335为主控芯片进行驱动控制,运放芯片PA85搭建线性直流式放大电路。同时,考虑受被控制对非线性、时变性和耦合性等因素的影响,通过采样电路对输出信号进行实时采样,采用模糊自适应增量式比例-积分-微分对控制系统修正调节。结果表明,经过模糊自适应修正后的驱动电路输出量得到明显改善,驱动系统输出信号的相位、频率控制精度分别为5°和0.5 kHz,能够稳定地驱动直线和旋转压电电机,具有较好的通用性。
驱动系统;交直流;宏微驱动;数字信号处理;比例-积分-微分控制
引 言
随着集成电路(integrated circuit,简称IC)及微机电系统(micro electro mechanical system,简称MEMS)技术的发展,对定位系统的精度、速度和行程等提出了极高的要求。为此,Sharon[1]提出了宏/微双驱动的概念。宏驱动[2-3]完成高速度、大行程的运动;微驱动[4-5]完成高精度、小行程运动,对宏动进行位置补偿,实现高精度、高速度、大行程及高频响运动。
孙立宁等[6]研制的宏微两级高精度定位系统,宏动平台采用直线电机驱动,微驱动则采用压电陶瓷驱动,驱动系统由精密线性光栅尺实现全闭环控制。Pahk等[7]研制的宏微两级纳米定位系统,采用滚珠丝杆螺母机构驱动宏动台,微动台采用压电陶瓷驱动器与柔性铰链组成传动结构,宏/微位置反馈分别采用编码器与激光干涉仪,并用双伺服控制的方法实现定位。中国科学院长春光机所[8]研制的宏微驱动超精度定位平台,采用电致伸缩器件或压电陶瓷和弹性铰链结合的结构作为微动平台,宏动部分采用伺服电机驱动,系统采用精密光栅尺实现闭环位移反馈,实现点位控制。然而,现有的这些宏微驱动定位平台宏动与微动两者结构独立,驱动系统独立,系统复杂,体积较大。
为此,提出了基于压电转换的具有宏微双重运动功能的新型直线微电机[9]与宏微驱动一体化的驱动控制系统[10],笔者根据宏微压电电机特点,设计宏微驱动控制系统并对其进行分析。
1 驱动系统总体设计
采用TI公司电机控制专用的TMS320F28335为主控制芯片,设计集交直流电压输出于一体的驱动系统,系统结构如图1所示。系统的输入参数,经微处理器解算分两路进行控制,一路信号通过D/A转换经线性放大电路输出稳压直流电源;另一路通过PWM/IO口信号经驱动电路控制6个绝缘栅双极型晶体管(insulated gate bipolar transistor,简称IGBT)的通断,使之输出交直流可变、幅值、频率、相位可调的电压,同时对系统进行闭环修正,使系统稳定运行。

图1 宏微驱动系统结构框图Fig.1 Diagram of macro/micro drive system
2 驱动控制电路设计
宏微驱动电路设计包括输入控制、稳压电源、线性放大、桥式变换、AD/DA转换及保护等电路设计。
2.1 线性放大电路设计
线性放大电路采用基于直流变换器原理的双级运算放大电路[11-12],如图2所示。第1级采用高精度运算放大器OP07,以获得较小输入偏置;第2级采用高压、大带宽的运算放大器PA85A以获得较大电压、功率。

图2 线性直流式放大电路Fig.2 DC amplifier stabilization circuit
为了实现线性放大电路的电压为0~400 V连续可调,对PA85A采用不对称供电,VCC1,VSS1及VSS2由低压稳压电路供电,VCC2由高压稳压电路供电。OP07,PA85A的放大倍数分别为2和40,由此确定R1=100 kΩ,R2=100 kΩ,R3=10 kΩ,R4=390 kΩ。
利用信号发生器WF1964A在放大电路的输入端分别输入0~5 V的三角波、方波等信号波形,可得输出为0~400 V、分辨率<100 mV、放大倍数为80的线性放大。
2.2 高压稳压电源电路设计
为使功率运算放大器PA85稳定工作,设计的的高压直流电源电路如图3所示。该电路采用悬浮式调压技术,由变压器、整流电路、稳压电路及调压电路组成。升压变压器输出的AC440 V经过整流、滤波及LM723组成调压电路后,输出稳定的直流电压。

图3 高压稳压电路Fig.3 High voltage circuit
2.3 桥式电路设计
图4为桥式变换电路,由6个IGBT (Q1~Q6)构成3个桥臂,当用于宏驱动时,Q3~Q4处于断开模式,控制其他4个IGBT的通断时序、频率实现两相交流电压的幅值、相位与频率输出。当用于微驱动时,改变Q1~Q6的通断状态以实现输出单/双路直流电压输出。
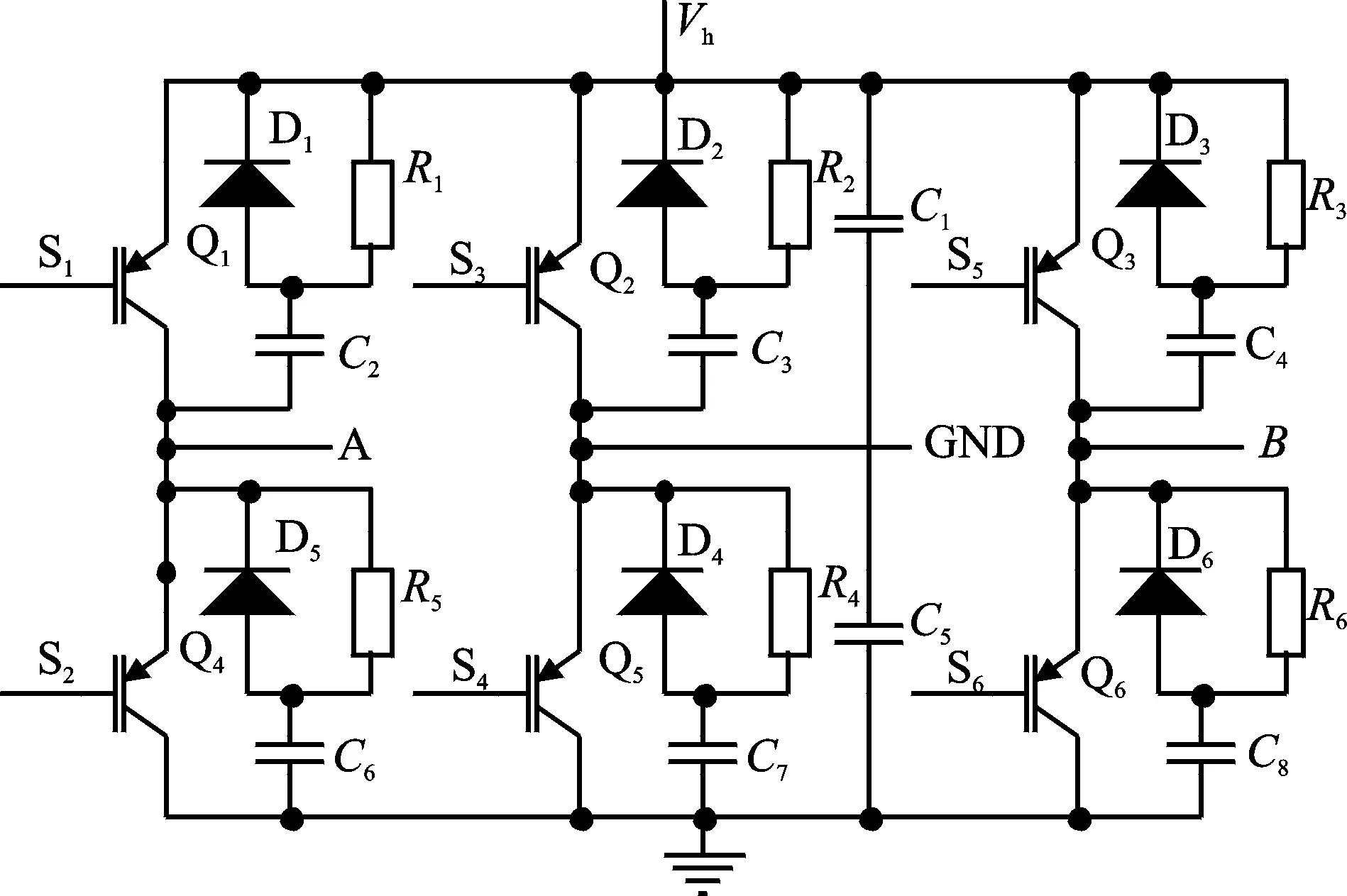
图4 桥式电路框图Fig.4 Diagram of bridge circuit
IGBT在开关过程中会产生瞬态冲击高压,为了减少产生的电压应力,采用了RCD缓冲电路对其进行保护。由于电路工作在较高频状态,因此,选用玻璃钝化的超快速二极管BYV26D快速恢复,电容C1使IGBT电压在tf内快速上升到2Vh
(1)
其中:tf为IGBT电流从初始值下降到零的时间;Vh为输入电压。
结合压电机需求,经计算,电容取为220 pF。存储在电容中的大部分电量被电阻消耗,为避免电容饱和,在下一个关断前,要求电容剩余的电量不得超过所充电荷的5%,因此电阻为30 Ω。
IGBT 性能发挥好坏与栅极驱动电路有关,当输出高压直流电时,桥式电路中部分IGBT一直保持常开,部分IGBT保持常闭状态。综合考虑限流和开关快慢要求,系统栅极电阻RG采用10Ω,驱动电路采用东芝TLP251光电耦合芯片。
系统需要6个TLP251组成的光电耦合器驱动IGBT,同一个桥臂上下桥驱动电路的供电相互独立,不同桥臂上半桥驱动电路的供电也需要相互独立,因此,需要4路独立的供电电路给TLP251供电。
3 驱动控制策略设计
3.1 驱动电压控制策略
输入电路的控制信号为0~3V,经AD一次转化后分别存储在Num1,Num2,… ,Num8缓存器中,采用平滑滤波算法对其滤波得到A/D转换后的输出值Num,data
(2)
(3)
其中:Vin为输入控制电路的电压幅值;data_c为调节器输出的调节信号;data为DSP输出的控制信号。
data经D/A转换即得到相应的输出电压,经线性放大电路进行功率、电压放大后为驱动系统提供稳定的高压电源。改变输入信号Vin,即能改变D/A转换的输出信号,以实现驱动电源的输出值的变化。
3.2 相位、频率控制策略
系统采用TMS320F28335增强型脉冲调制器模块(ePWM)产生PWM信号, 利用其独立输出双边对称模式控制输出PWM特性。
Q1~Q44个IGBT由4路PWM经光耦驱动电路控制,Q5~Q6由IO口经光耦驱动电路控制。PWM1和PWM2相位差可调,调节步骤如下:确定EPWM1计数比较A寄存器的值CA1,通过式(4)确定特定相位差情况下EPWM2计数比较A寄存器的值C2,其中phase为两相电路的相位差。在已知PWM输出的频率下,确定时间基准时钟TBCLK,由式(5)计算得到时间基准周期寄存器的值TBPRD。
(4)
(5)
3.3 基于模糊自适应增量式PID修正方法
由于压电电机具有非线性、时变性,同时系统相位差、频率发生偏移,导致效率降低。因此,将模糊控制与 PID 控制相结合,集两者的优势,既实现了对驱动系统进行实时调节又克服了复杂的控制对象难以求出精确的数学模型[13-14]的难题,基于模糊自适应PID的调节原理框图如图5所示。

图5 模糊自适应增量式PID结构图Fig.5 Structure of fuzzy adaptive incremental PID
PID的调节规律如下
(6)
其中:Kp为比例积分;Ti为积分时间常数;Td为微分常数。
将Kp/Ti,Kp×Td分别用Ki和Kd代替,同时对式子进行离散化处理,可得
(7)
采用增量式PID方式。已知t时刻的调节量为uf(t)时,t-1时刻的调节量为uf(t-1),将uf(t)与uf(t-1)进行差值处理可得t时刻的增量Δuf(t)
(8)
同时,以误差e(t)和误差变化de(t)/dt作为输入,进行模糊推理,查询控制规则表,实现不同时刻对Kp,Ki和Kd的实时调节。
4 驱动系统性能测试及数据分析
由信号发生器-WF1964A、TRUM60旋转电机[15]、直线压电电机、示波器-Tektronix TDS3043B、SZG-441C非接触式手持数字转速表和OFV-505/5000激光测振仪组建的测试平台如图6所示。

图6 系统硬件测试平台Fig.6 Test platform of hardware system
4.1 驱动系统空载试验分析

图8 转速特性曲线Fig.8 Characteristic curve of speed
在驱动系统输出端无负载的情况下,使输出电压为100 V,调节相位差为90°,用示波器观察其开环/闭环状态下输出波形,测得的输出信号如图7所示,空载条件下,无论有无调节器,输出相位、频率均无明显变化。

图7 空载条件下输出两相信号Fig.7 Two phase signal output in no-load condition
4.2 驱动系统负载试验分析
4.2.1 宏驱动试验
以直线压电电机和旋转超声电机为试验对象对驱动系统的宏驱动进行相位差、频率、电压测试如图8所示。
图8(a)表示两种电机的转速-相位的关系。试验表明:当相位差为0°时,电机速度为0 r/min,随着相位差增大,速度增加,当相位差为±90°时转速达到最大,其关系呈现近似双曲线正切关系。利用origin的非线性拟合曲线y=atanh(bx+c)近似拟合实测曲线。
图8(b)表示两相输出信号的相位差为90°时,转速-频率的关系曲线。试验表明:输出频率只有在一定范围内电机才运转,在电机的本身的谐振频率附近,电机的转速达到最大,之后随着频率的增加,转速迅速下降,其曲线特性呈现类似于指数的关系。利用函数y=a+bexp(cx+d)近似拟合实测曲线。
图8(c)表示两相输出信号的相位差为90°,两种电机在谐振频率下,转速-直流输入电压的关系。随着输入电压的升高,转速也随之升高,呈现出近似线性关系,用直线y=ax+b近似拟合实测曲线。
4.2.2 微驱动试验
以宏微直线压电电机为试验对象,对驱动系统的微驱动进行电压位移测试,采用OFV-505/5000激光测振仪对其进行测量,利用三脚架固定OFV505光学头,将光学头测量微位移变化的信号传输到OFV-5000控制器,进行处理之后通过示波器进行观测。
如图9所示,随着驱动系统输出的电压的增大微位移量也增大,呈现近似线性关系。

图9 压电电机微运动位移曲线Fig.9 Displacement curve of piezoelectric motor’s micro movement
4.3 模糊自适应增量PID调节器对系统影响测试分析
由试验可知,当输入直流电压100 V、两相信号相位差90°、工作频率为40.3 kHz时,旋转电机工作在最优状态,平均转速为102 r/min。以旋转电机为试验对象,调节控制参数使之工作在最优状态下,在有无PID调节器状态下,对输出相位、频率和电机转速误差进行比较,结果如表1所示。经过模糊自适应增量式PID调节后,相位、频率误差明显减少,其标准方差分别为2.97和0.16,其运行稳定,转速误差在0~3 r/min的范围内变化。

表1 各参数误差比较
5 结 论
1) 研制了基于主控芯片TMS320F28335交直流一体化的驱动控制系统。该系统实现了宏、微驱动控制系统一体化,输出参数独立可调,能够驱动不同直线、旋转不同类型的超声电机和压电微驱动器。
2) 试验表明,在宏运动状态下,电机运行时的转速与输入相位差、频率与电压存在近似正切、指数变化规律特性;在微运动状态下,位移与输入电压存在近似直线变化规律特性。
3) 通过采样电路、AD转换将输出相位、频率信号实时的反馈到控制器,进行闭环模糊自适应增量式PID修正。试验验证表明,闭环控制相较于开环控制,其相位,频率误差降低了45.5%和58.9%,电机转速稳态精度提高了58.3%。
[1] Sharon A. The macro/micro manipulator: An improved architecture for robot control[J]. Robotics and Computer-Integrated Manufacturing, 1989,10(3):209-222.
[2] 朱鹏举,时运来,赵淳生,等.一种新型大推力直线压电作动器[J].振动、测试与诊断,2015,35 (1):163-169.
Zhu Pengju,Shi Yunlai,Zhao Chunsheng,et al.A new type of large-thrust linear piezoelectric actuator [J].Journal of Vibration,Measurement & Diagnosis,2015,35 (1) :163-169.(in Chinese)
[3] Zhang Tiemin,Xie Zhiyang,Zhang Jiantao,et al.A novel ultrasonic motor driver based on two phase PWM signals [J].Advanced Materials Research,2011,189-193:1543-1546.
[4] Zhang Tiemin,Cao Fei,Li Shenghua,et al.Finite element study on the cylindrical linear piezoelectric motor micro driven[C]∥Intelligent Robotics and Applications,Part Ⅰ. Switzerland:Springer International Publishing,2014:179-186.
[5] Zhang Tiemin,Cao Fei,Li Shenghua,et al.FEM analysis and parameter optimization of a linear piezoelectric motor macro driven[C]∥Intelligent Robotics and Applications,Part Ⅰ. Switzerland:Springer International Publishing, 2014:171-178.
[6] 孙立宁,孙绍云,曲东升,等.大行程高精度宏/微双重驱动机器人系统的研究[J].高技术通讯,2004,14(4):50-52.
Sun Lining,Sun Shaoyun,Qu Dongsheng,et al.Study on the large travel range and high precision macro/micro dual-drive manipulator[J].Chinese High Technology Letters,2004,14(4):50-52.(in Chinese)
[7] Pahk H J,Lee D S,Park J H.Ultra precision positioning system for servo motor-piezo actuator using the dual servo loop and digital filter implementation[J].International Journal of Machine Tools & Manufacture,2001,41(1):51-63.
[8] 陈洪涛,程光明,肖献强,等,宏/微双重驱动技术的研究和应用现状[J].机械设计与制造,2007(1):153-155.
Chen Hongtao,Cheng Guangming,Xiao Xianqiang,et al.Research and application of macro/micro dual-drive technology[J]. Machinery Design & Manufacture,2007(1):153-155.(in Chinese)
[9] 张铁民,曹飞,梁莉,等.一种宏微驱动型直线压电电机及其驱动方法:中国,CN103281005A[P].2013-09-04.
[10]张铁民,许志林,曹飞,等.宏微压电驱动器的电源设计与试验[J].压电与声光,2015,37(1):167-171.
Zhang Tiemin,Xu Zhilin,Cao Fei,et al.Design and experiment of a power supply to drive a macro-micro piezoelectric actuator[J].Piezoelectrics & Acoustooptics,2015,37(1):167-171.(in Chinese)
[11]王金鹏,时运来,薛雯玉,等.高低温环境下超声电机伺服控制系统的性能[J].振动、测试与诊断,2011,31(3):291-294.
Wang Jinpeng,Shi Yunlai,Xue Wenyu,et al.Performance of ultrasonic motor servo control system under high and low temperature [J].Journal of Vibration,Measurement & Diagnosis,2011,31(3):291-294.(in Chinese)
[12]朱晓锦,曹浩,陆美玉,等.基于PA95功放芯片的压电功率放大器开发[J].压电与声光,2008,30(5):561-564.
Zhu Xiaojin,Cao Hao,Lu Meiyu,et al.Development of piezoelectric power amplifier based on PA95 chip[J].Piezoelectrics & Acoustooptics,2009,30(5):561-564.(in Chinese)
[13]李迎,孙亚飞.基于增量PID的压电微位移驱动控制系统开发[J].测控技术,2011,30(3):40-44.
Li Ying,Sun Yafei.Development of actuation control system of piezoelectric micro- displacement device based on increment pid algorithm[J].Measurement & Control Technology,2011,30(3):40-44.(in Chinese)
[14]张建桃,张铁民,梁莉,等.超声电机非线性建模和广义预测控制[J].电机与控制学报, 2011,15(6):50-56.
Zhang Jiantao,Zhang Tiemin,Liang Li,et al.Nolinear modeling and generalized predictive control of ultrasonic motor[J]. Electric Machines and Control.2011,15(6):50-56.(in Chinese)
[15]梁大志,张军,赵淳生,等.旋转型超声电机伺服特性探讨[J].振动、测试与诊断,2014,34(2):306-309.
Liang Dazhi,Zhang Jun,Zhao Chunsheng,et al.The exploration of servo characteristics of rotary ultrasonic motor[J].Journal of Vibration,Measurement & Diagnosis,2014,34 (2) :306-309.(in Chinese)

*国家自然科学基金资助项目(51177053);广东省教育厅科技创新重点基金资助项目(2012CXZD0016);高等学校博士学科点专项科研基金资助项目(20124404110003);广州市科技计划资助项目(201510010227)
2015-05-05;
2015-05-29
10.16450/j.cnki.issn.1004-6801.2017.02.010
TM35;TN710;TH13
张铁民,男,1961年11月生,博士、教授、博士生导师。主要研究方向为机电系统控制、超声电机及机器人技术等。曾发表《应用组态软件的超声电机运动参数测试系统》(《振动、测试与诊断》2010年第30卷第2期)等论文。 E-mail:tm-zhang@163.com 通信作者简介:梁莉,女,1963年7月生,博士、高级实验师。主要研究方向为压电驱动、机电一体化技术等。 E-mail:ll-scau@163.com
猜你喜欢
防爆电机(2022年3期)2022-06-17
仪表技术与传感器(2022年4期)2022-05-31
汽车实用技术(2022年7期)2022-04-20
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
陶瓷学报(2020年6期)2021-01-26
房地产导刊(2020年11期)2020-12-28
