
考虑模型形式误差的转子动力学修正及确认*
2017-04-27 07:50张保强郭勤涛袁修开
振动、测试与诊断 2017年2期
张保强, 郭勤涛, 袁修开
(1.厦门大学航空航天学院 厦门,361005) (2.南京航空航天大学机电学院 南京,210016)
考虑模型形式误差的转子动力学修正及确认*
张保强1, 郭勤涛2, 袁修开1
(1.厦门大学航空航天学院 厦门,361005) (2.南京航空航天大学机电学院 南京,210016)
研究考虑模型形式误差的轴承-转子系统工作转速下的动力学模型修正和确认方法。首先,介绍了模型形式误差以及基于复模态特征值灵敏度的模型修正理论;然后,在此基础上以轴承-柔性转子系统为仿真算例,考虑模型形式误差,使用系统在恒定工作转速下的涡动频率和阻尼参数,同时对轴承的支承刚度、支承阻尼和转盘的直径转动惯量参数进行修正;最后,通过不平衡响应结果对修正模型进行了确认。仿真结果显示,考虑模型形式误差时的修正参数最大误差仍有-10.1%,而修正后特征值实部最大误差为0.95%,特征值虚部最大误差为-1.15%,修正后不平衡响应与目标模型基本重合。研究表明,考虑模型形式误差时轴承-转子系统的修正方法是稳健的,也是有效可行的。
模型修正; 模型形式误差; 转子动力学; 工作转速; 确认
引 言
结构动力学模型修正技术已经广泛应用在航空航天、机械工程和土木工程等各个领域,根据其修正对象一般可以分为矩阵型和设计参数型两种,而后者物理意义明确,因此更有益于实际工程应用[1]。对于工程中的很多旋转机械,比如航空发动机中的轴承-转子系统等,其动力学设计需要提供准确的模型[2],因此也需要对轴承-转子系统的动力学模型进行修正。
传统有限元模型修正一般都是基于实模态参数进行的[3-5],但对于旋转机械,考虑到支承阻尼参数和陀螺效应的影响,不得不采用复模态理论求解[6-7]和修正。基于复模态特征参数的模型修正方法,正在逐步开展[8-13]。文献[8-12]都是针对矩阵型模型修正展开研究的,其中文献[12]给出了含阻尼有限元模型的修正方法,该方法虽然保证了矩阵的稀疏性,但仍属于矩阵型模型修正,不易于工程设计中的参数修改和优化。Yuan等[13]采用实验非完备复特征参数将模型修正转化为约束最优化问题,同时修正模型的刚度、阻尼和陀螺矩阵,得到了满足特征方程的最优矩阵,但此修正方法仍然属于矩阵型模型修正,物理意义不明确,同样不利于工程应用。
对于轴承-转子系统的动力学模型修正,赵斌等[14]使用单盘转子系统的前四阶固有频率为残差,基于粒子群优化算法对转子的材料弹性模量和两个轴承参数进行了修正。Miao等[15]以双转子结构的前六阶固有频率为残差,分别建立了一维和三维转子有限元模型,对双转子四个区域部分材料的弹性模量进行了修正,并对修正后的模型进行了临界转速和不平衡响应的确认。张保强等[16]基于实验复模态参数和灵敏度分析技术,对磁轴承-转子系统的支承参数进行了识别研究。Xu等[17]使用轴的前四阶共振频率和MAC残差,对磁悬浮轴承-转子系统的轴模型进行了修正,并通过频响函数进行了验证。Chouksey等[18]考虑到滑动轴承支承参数随转速变化而发生变化的事实,改进了一种基于复模态特征灵敏度的方法,对滑动轴承参数进行了识别。Cavalini等[19]以轴承-转子系统的频响函数为残差,提出了自适应差分进化算法。
当同时考虑阻尼和陀螺效应时,会大大增加轴承-转子系统动力学模型修正的困难。此外,目前轴承-转子系统动力学模型都是基于转子本身或者轴承-转子系统零转速下的模态参数进行修正的,而实际系统在工作转速下,系统涡动频率和阻尼参数会发生改变,轴承支承参数也是动态变化的,因此需要发展一种使用工作转速下的模态参数对轴承-转子系统进行修正的方法。另一方面,对于轴承-转子系统模型修正,一般都是分步、分层展开的[20],因此需要考虑每一步修正后模型的误差对下一层修正的影响,也就是在模型修正中需要考虑模型形式误差的影响。
基于系统工作转速下的模态参数,研究适合应用于工程实际轴承-转子系统模型修正方法。通过一轴承-转子系统的仿真算例,考虑转子材料弹性模量存在模型形式误差,使用1 600 r/min时的涡动频率和阻尼参数,同时修正轴承的支承刚度、支承阻尼和转盘的直径转动惯量等参数,验证所提出方法的稳健性和有效性,最后通过不平衡响应对修正模型进一步确认。
1 基本理论
1.1 模型形式误差介绍
模型形式误差是在构造数学或力学模型过程中引入的,是一类关于模型本身的误差。这种误差主要是为了减少构造模型的复杂度而引入的简化假设引起的,而这些简化假设的引入不能通过改变参数来减小,因此模型形式误差属于认知不确定性[21-22]。
本研究所考虑的模型形式误差,是指在分层或分步模型修正过程中,子部件结构动力学模型修正后所包含的模型或参数误差。对于轴承-转子系统而言,首先需要对轴本身的模型进行修正,即使修正后,轴的结构动力学模型仍然存在模型形式误差。笔者主要研究轴本身存在的模型形式误差在轴承-转子系统动力学模型修正中的影响。
1.2 复模态有限元模型修正
基于复模态的有限元模型修正通常看作是一个优化问题
(1)
其中:p为设计参数向量;VLB和VUB分别为设计参数的边界;ε为特征量的残差。
(2)
为实验测试和有限元计算特征值之间的残差向量。而
(3)
(4)
其中:αE,ωE分别为实验测试得到的特征值的实部和虚部;αA,ωA分别为有限元计算得到的复模态特征值的实部和虚部;εα(p),εω(p)分别为特征值实部和虚部的残差向量。
基于灵敏度的有限元模型修正中

(5)
因此
(6)
其中:Δp为参数的改变量;S为特征量的一阶灵敏度矩阵;S+为灵敏度矩阵S的广义逆。
而基于复模态灵敏度分析的设计参数型模型修正方法的实现是一个迭代的过程,其主要步骤可参考文献[16]。
1.3 复模态特征值灵敏度
在欠阻尼情况下,复模态特征方程对应的特征值为
(7)
其中:i=1,2,…,N;λi为第i阶特征值;αi,ωi分别为特征值λi的实部与虚部。

(8)
复模态特征方程对设计参数求导数,可得特征值的一阶偏导数[23]
(9)
其中:M为质量矩阵;K为刚度矩阵;Cd为阻尼矩阵,它们都为对称矩阵;G为陀螺矩阵,是反对称的。

1.4 模态匹配及相关分析
有限元模型修正中,当采用频率为响应特征时,在迭代过程中常常出现模态阶次跳动的情况而使得有限元计算与实验之间的目标频率匹配错乱。所以振型相关系数(modalassurancecriterion,简称MAC),即模态置信度,常常用来解决模态匹配问题,达到模态跟踪的目的。
振型相关系数是相关分析中的一种,用来表示两个模型之间的模态振型相似程度,它是一个介于0~1之间的标量。当振型相关系数值为1时,代表两个振型完全相关;当值为0时,表示两个振型线性无关。文中的修正方法中引入振型相关系数只是为了得到特征值的正确匹配。
2 轴承-转子系统模型修正
为了验证所提出模型修正方法的正确性和有效性,采用一个轴承-柔性转子系统的仿真修正进行验证。
2.1 轴承-转子系统有限元模型
考虑不对称单盘轴承-转子系统[24]如图1所示,l1=2.40 m,为两个轴承之间距离;l=3.0 m,为转子的总长度;kxx1,cxx1,kyy1,cyy1;kxx2,cxx2,kyy2,cyy2分别为两轴承径向刚度和阻尼参数。
图1中,转子直径d=0.16 m,转子材料的弹性模量初始值E=210 GPa,密度为7 850 kg/m3,泊松比为0.3。单盘直径为1.5 m,厚为0.06 m。仿真计算中将两轴承的阻尼看作相等,即cxx1=cxx2=cxx;

图1 轴承-转子系统有限元模型示意图Fig.1 A finite element Bearing-rotor model
cyy1=cyy2=cyy。两轴承支承参数的初始和目标值列于表1中。根据单盘的尺寸和材料,可以得到转盘的质量m=828.9 kg,极转动惯量Jp=322.22 kg·m2,直径转动惯量Jd=117.1 kg·m2。
采用通用有限元软件Nastran中的一维梁单元建立转子有限元模型,轴承的刚度和阻尼参数采用Bush单元模拟,盘采用集中质量单元简化。系统有限元模型共包含21个节点。应用Nastran中的转子动力学模块计算得到系统在1 600 r/min时的各阶涡动频率。表1给出了仿真算例参数初值和修正结果。在迭代过程中使用相对值为修正参数,例如kxx1初始值为1.0×5.2×107N/m,目标值为1.2×5.2×107N/m。表2列出了系统前7阶复特征值,其中初始值和目标值分别对应表1中参数的相应取值。

表1 仿真参数初始值、目标值和修正值比较
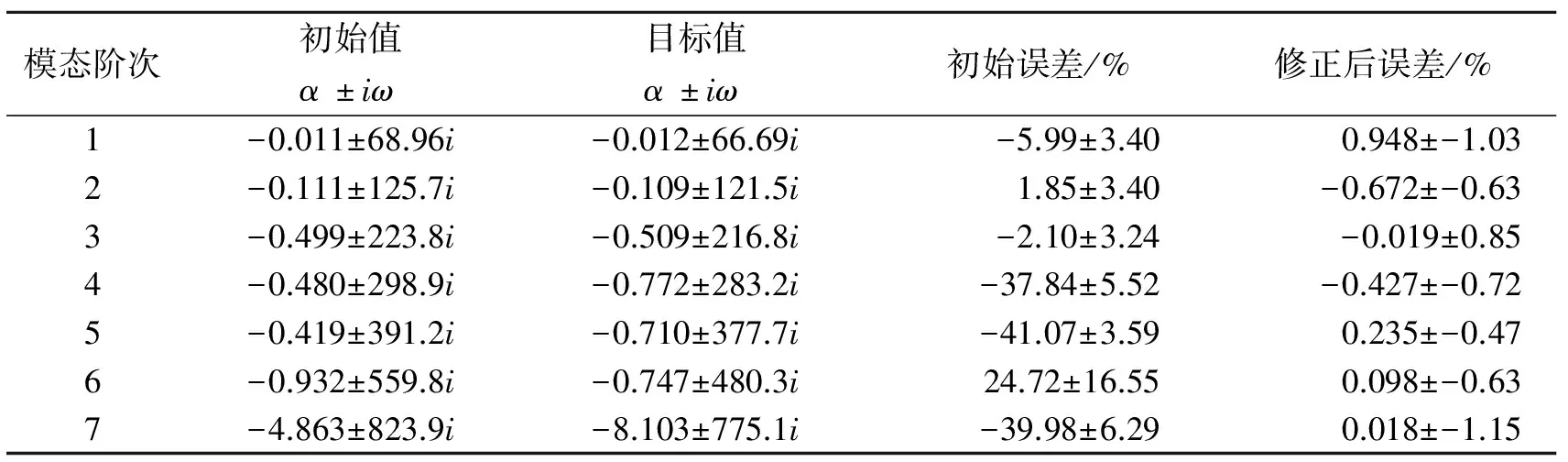
表2 1 600 r/min时系统各阶涡动特征值及修正前后误差
Tab.2 The wheel eigenvalue and errors for initial and updated model in 1 600 r/min
模态阶次初始值α±iω目标值α±iω初始误差/%修正后误差/%1-0.011±68.96i-0.012±66.69i-5.99±3.400.948±-1.032-0.111±125.7i-0.109±121.5i1.85±3.40-0.672±-0.633-0.499±223.8i-0.509±216.8i-2.10±3.24-0.019±0.854-0.480±298.9i-0.772±283.2i-37.84±5.52-0.427±-0.725-0.419±391.2i-0.710±377.7i-41.07±3.590.235±-0.476-0.932±559.8i-0.747±480.3i24.72±16.550.098±-0.637-4.863±823.9i-8.103±775.1i-39.98±6.290.018±-1.15
2.2 修正中的模型形式误差
对轴承-转子系统的模型修正,一般都是采用分层策略执行的,即首先根据转子结构的自由-自由状态下的实验测试数据修正转子的结构参数,得到精确的转子结构有限元模型后再根据转子实际工作状态修正系统中轴承等其他的不确定性参数。
此算例中假设已经对转子自由-自由状态的有限元模型进行了修正,并且假定修正后的转子材料的弹性模量仍然存在2%的误差。
对于转子自由-自由状态的模型修正而言,转子材料的弹性模量参数为修正参数,属于参数不确定性。而该参数在轴承-转子系统整体动力学模型修正时,并没有再作为修正参数,因此弹性模量的2%的误差就成为整体轴承-转子系统模型修正中的模型形式误差,并且不能通过修正其他参数减少该模型形式不确定性。
2.3 考虑模型形式误差的修正
在轴承-转子系统动力学模型修正中,选择两个轴承各自的支承参数,以及盘的直径转动惯量等7个参数作为修正参数(见表1)。修正目标选择前7阶特征值的残差。
模型修正的程序通过Matlab自动调用Nastran来实现,基于二次规划(quadratic programming,简称QP)优化方法迭代计算,迭代过程中使用MAC匹配选择正确的特征值目标计算残差。具体流程如图2所示。

图2 模型修正实现流程Fig.2 A flow chart of model updating
图3~图5分别给出了修正参数、特征值实部相对误差及特征值虚部相对误差的收敛情况。修正前后系统各阶涡动特征值的比较情况列于表2中。

图3 仿真参数收敛情况Fig.3 The convergence curve of the parameters

图4 特征值实部收敛曲线Fig.4 The convergence curve of the real part of the eigenvalue

图5 特征值虚部收敛曲线Fig.5 The convergence curve of the imaginary part of the eigenvalue
从表1中参数的修正结果,表2中特征值的修正误差以及图3~图5的迭代情况可知,在修正迭代10步左右时,修正参数和修正目标基本趋于稳定。修正前,参数最大误差为66.7%,修正后参数最大误差仍有-10.1%。但是特征值实部在修正前最大误差为-41.07%,修正后最大误差为0.95%;特征值虚部在修正前最大误差为16.55%,修正后最大误差为1.15%。从修正结果可以看出,考虑模型形式误差后,轴承-转子系统的模型修正参数虽然仍存在比较大的误差,但是目标特征值误差已经修正到工程可接受的范围内。
3 不平衡响应确认
为了对修正结果进一步验证,采用不平衡响应的预测对修正后模型进行确认。不平衡响应仍然采用有限元软件Nastran进行计算。考虑轮盘存在4.0×10-4kg·m的不平衡质量,工作转速从1 Hz变化到150 Hz。图6分别对初始模型、目标模型和修正后模型的不平衡响应预测结果进行了比较。

图6 不平衡响应的比较Fig.6 The comparison of unbalance response
从图6不平衡响应的比较中可以看出,修正前模型的不平衡响应不管是共振频率位置还是共振峰值大小,与目标模型都有很大差别;而修正后模型的不平衡响应与目标模型基本重合。由此进一步验证了考虑模型形式误差的轴承-转子系统动力学模型修正方法的稳健性和有效性。
4 结束语
考虑模型形式误差,将工作转速下的涡动频率和阻尼参数作为残差,可以有效地对轴承-转子系统动力学模型进行修正,不平衡响应的确认也验证了修正方法的有效性和稳健性。在系统恒定工作转速下,该方法可以同时对轴承支承刚度、阻尼以及转动惯量等非对称的耦合参数进行修正。考虑模型形式误差后,所识别得到的轴承支承参数仍有比较大的误差,这对工程旋转机械是非常有参考价值的。另外,所提出的方法需要使用实验数据的修正进一步验证。
[1] Goge D. Automatic updating of large aircraft models using experimental data from ground vibration testing[J]. Aerospace Science and Technology, 2003, 7(1): 33-45.
[2] 廖明夫, 谭大力, 耿建明, 等. 航空发动机高压转子的结构动力学设计方法[J]. 航空动力学报, 2014, 29(7): 1505-1519.
Liao Mingfu, Tan Dali, Geng Jianming, et al. Structure dynamics design method of aero-engine high pressure rotor[J]. Journal of Aerospace Power, 2014, 29 (7):1505-1519. (in Chinese)
[3] Mottershead J E, Link M, Friswell M I. The sensitivity method in finite element model updating: a tutorial[J]. Mechanical Systems and Signal Processing, 2011, 25(7): 2275-2296.
[4] 张保强, 陈国平, 郭勤涛. 使用有效模态质量和遗传算法的有限元模型修正[J]. 振动、测试与诊断, 2012, 32(4): 577-580.
Zhang Baoqiang, Chen Guoping, Guo Qintao. The finite element model updating using effective modal mass and genetic algorithm[J].Journal of Vibration, Measurement & Diagnosis,2012, 32(4): 577-580. (in Chinese)
[5] 常涛, 郭勤涛, 张保强. 应用模型修正方法的印制电路板参数识别[J]. 振动、测试与诊断, 2013, 33(3): 509-513.
Chang Tao, Guo Qintao, Zhang Baoqiang. Parameter identification of printed circuit board using model correction method[J]. Journal of Vibration, Measurement & Diagnosis,2013, 33(3): 509-513. (in Chinese)
[6] Cortés F, Elejabarrieta M J. Computational methods for complex eigenproblems in finite element analysis of structural systems with viscoelastic damping treatments[J]. Computer Methods in Applied Mechanics and Engineering, 2006, 195(44): 6448-6462.
[7] Elbeheiry E M. On eigenproblem solution of damped vibrations associated with gyroscopic moments[J]. Journal of Sound and Vibration, 2009, 320(3): 691-704.
[8] Arora V, Singh S P, Kundra T K. Damped model updating using complex updating parameters[J]. Journal of Sound and Vibration, 2009, 320(1): 438-451.
[9] 冯文贤,陈新.基于试验复模态参数的有限元模型修正[J].航空学报,1999,20(1):11-16.
Feng Wenxian, Chen Xin. Updating design parameters of finite element model by using test complex modal data [J] .Acta Aeronautica et Astronautica Sinica, 1999, 20(1) : 11-16. (in Chinese)
[10]Lu Yong, Yu Zhenguo. A two-level neural network approach for dynamic FE model updating including damping[J]. Journal of Sound and Vibration, 2004, 275(3): 931-952.
[11]蒋家尚,袁永新.基于复模态试验数据的粘性阻尼矩阵的修正[J].振动与冲击,2007, 26(5):74-80.
Jiang Jiashang, Yuan Yongxin.Vicious damping matrix updating from complex modal testing[J]. Journal of Vibration and Shock, 2007, 26(5): 74-80. (in Chinese)
[12]Datta B N, Deng S, Sokolov V O, et al. An optimization technique for damped model updating with measured data satisfying quadratic orthogonality constraint[J]. Mechanical Systems and Signal Processing, 2009, 23(6): 1759-1772.
[13]Yuan Yongxin, Guo Yongqiang. A direct updating method for damped gyroscopic systems using measured modal data[J]. Applied Mathematical Modelling, 2010, 34(6): 1450-1457.
[14]赵斌, 陈果. 转子-支承耦合结构的模型修正研究[J]. 航空计算技术, 2014, 44(5): 86-91.
Zhao Bin, Chen Guo. Study on model updating of a rotor-support coupling structure[J]. Aeronautical Computing Technique, 2014, 44(5): 86-91. (in Chinese)
[15]Miao Hui, Zang Chaoping, Friswell M. Model updating and validation of a dual-rotor system[C]∥Proceedings of the 26th International Conference on Noise and Vibration Engineering (ISMA2014). Leuven, Belgium: Catholic University of Louvain,2014: 2723-2738.
[16]张保强, 郭勤涛, 陈国平, 等. 基于复模态模型修正方法的磁悬浮轴承支承参数识别[J]. 南京航空航天大学学报, 2010, 42(6): 748-752.
Zhang Baoqiang, Guo Qintao, Chen Guoping, et al. Parameter identification of active magnetic bering support based on finite element model updating using complex modal data[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2010, 42(6): 748-752. (in Chinese)
[17]Xu Yuanping, Zhou Jin, Di Long, et al. Active magnetic bearing rotor model updating using resonance and MAC error[J]. Shock and Vibration, 2015, 2015(2): 1-9.
[18]Chouksey M, Dutt J K, Modak S V. Model updating of rotors supported on journal bearings[J]. Mechanism and Machine Theory, 2014, 71(1): 52-63.
[19]Cavalini Jr A A, Lobato F S, Koroishi E H, et al. Model updating of a rotating machine using the self-adaptive differential evolution algorithm[J]. Inverse Problems in Science and Engineering, 2016, 24(3): 504-523.
[20]丁继锋, 马兴瑞, 韩增尧, 等. 结构动力学模型修正的三步策略及其实践[J]. 航空学报, 2010, 31(3): 546-552.
Ding Jifeng, Ma Xingrui, Han Zengyao, et al. Three step model updating method in structure dynamics and its application[J]. Acta Aeronautica Et Astronautica Sinica, 2010, 31(3): 546-552. (in Chinese)
[21]Oberkampf W L, Helton J C, Joslyn C A, et al. Challenge problems: uncertainty in system response given uncertain parameters[J]. Reliability Engineering and System Safety, 2004, 85(1):11-19.
[22]Oberkampf W L, Roy C J. Verification and validation in scientific computing[M]. New York, USA: Cambridge University Press, 2010: 572-575.
[23]Adhikari S.Rates of change of eigenvalues and eigenvectors in damped dynamic system [J]. American Institute of Aeronautics and Astronautics Journal, 1999, 37 (11): 1452-1458.
[24]Chouchane M, Guedria N, Smaoui H. Eigensensitivity computation of asymmetric damped systems using an algebraic approach[J]. Mechanical Systems and Signal Processing, 2007, 21 (7):2761-2776.

*国家自然科学基金资助项目(51505398,U1530122,51275240);航空科学基金资助项目(20150968003)
2016-03-17;
2016-06-17
10.16450/j.cnki.issn.1004-6801.2017.02.026
V231; O327; TH113
张保强,男,1981年9月生,博士、助理教授。主要研究方向为复杂结构动力学模型修正和模型确认。曾发表《Static frame model validation with small samples solution using improved kernel density estimation and confidence level method》(《Chinese Journal of Aeronautics》2012,Vol.25,No.6)等论文。 E-mail: bqzhang@xmu.edu.cn
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
哈尔滨轴承(2021年2期)2021-08-12
哈尔滨轴承(2021年1期)2021-07-21
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
凯里学院学报(2020年3期)2020-06-28
摄影之友(影像视觉)(2017年1期)2017-07-18
课程教育研究·新教师教学(2016年18期)2017-04-12
