一种基于单片机控制的自动伸缩桌设计原理∗
2017-04-27 03:54戴金耀
林产工业 2017年7期
刘 杏 陈 威 戴金耀 王 伟
伸缩结构是一种具有伸展和缩回功能的结构,其在工程技术和日常生活中得到了广泛应用。随着现代生活水平的提高,人们对家具的功能和品味有了极大的提升,具有伸缩功能的便携桌具也伴随人们的生活习惯应运而生[1]。
近年来关于自动伸缩桌的研究,主要分为支架固定桌面延伸式和支架可调整式两种形式[2]。支架固定桌面延伸式桌具,主要有德国Thonet公司的悬臂连接式桌子,美国Tossa公司的“普格拉玛”抽拉结构方式桌,以及旋转结构中采用可调节的金属拉杆来控制桌面变形的“泰坦”桌[3]。支架可调整式桌具是使桌子的一侧支架固定,而另一侧具备可调节性,通过支架的调整来改变桌面的长度和面积。
但目前,这些伸缩桌大多为手动调节,操作过于繁琐,为了更好地满足现代人的生活需求,设计出一种基于单片机控制的自动伸缩桌具,该设计不仅提高了使用的舒适度,也更好地实现了桌具的人性化设计。
1 自动伸缩桌的设计原理
1.1 设计方案选定
对于支架固定桌面延伸式桌具,桌子的基本支撑框架固定,桌面由几部分组成,每部分桌面都可以随着变换机构而运行,桌面位置发生变化,并与固定桌面重新拼接成新的桌面,这种结构主要靠旋转、翻转、抽拉、悬臂桌面等方式来实现桌面大小的变换,结构相对简单,稳定性和可靠性较好。
对于支架可调整式桌具,主要是将活动桌面隐藏在固定桌面内部或者下方,支架和桌面的连接方式基本是通过桌面下方的金属滑槽进行连接。当需要变化尺寸时,顺着金属滑槽的方向移动支架,活动桌面会随着支架的移动进行平移并与固定桌面拼接成一个新的桌面,这种结构内部传动机构较复杂,并且内部金属滑槽的加工难度大,安装精度低,稳定性和可靠性较差。
因此,通过对比两种变换机构的可靠性以及加工难易程度,从而选定以支架固定桌面延伸式中的旋转方式变换大小的方案进行设计,如图1所示,自动伸缩桌主要由9块桌面、1个底板、1个曲柄滑块机构、1个丝杆螺母撑杆机构、4个桌腿以及控制系统等几部分组成。

图1 自动伸缩桌结构示意图Fig.1 Structure diagram of automatic stretching table
1.2 工作原理
如图2所示,在进行桌面面积变化的时候,首先由步进电机7正转提供动力,使丝杆8运动,带动由十字接头相接的撑杆10运动,实现长方形桌面2的展平,此时单片机发出延时信号,电机7停止运动,电机6正转,通过丝杆11运动的传递将运动传递给曲柄13使其带动与之相连接的桌面撑杆14,将运动传递给滑块15使其沿着直线导轨16运动,实现正方形桌面1的展开运动,此时单片机的延时作用消除,电机7正转,驱动丝杆8运动,通过十字接头9的连接作用将运动传递给与撑杆10相接的长方形桌面2,长方形桌面2上升,从而实现桌面面积变大的功能,同理,当两个电机反转时便可以实现桌面面积的缩小功能。
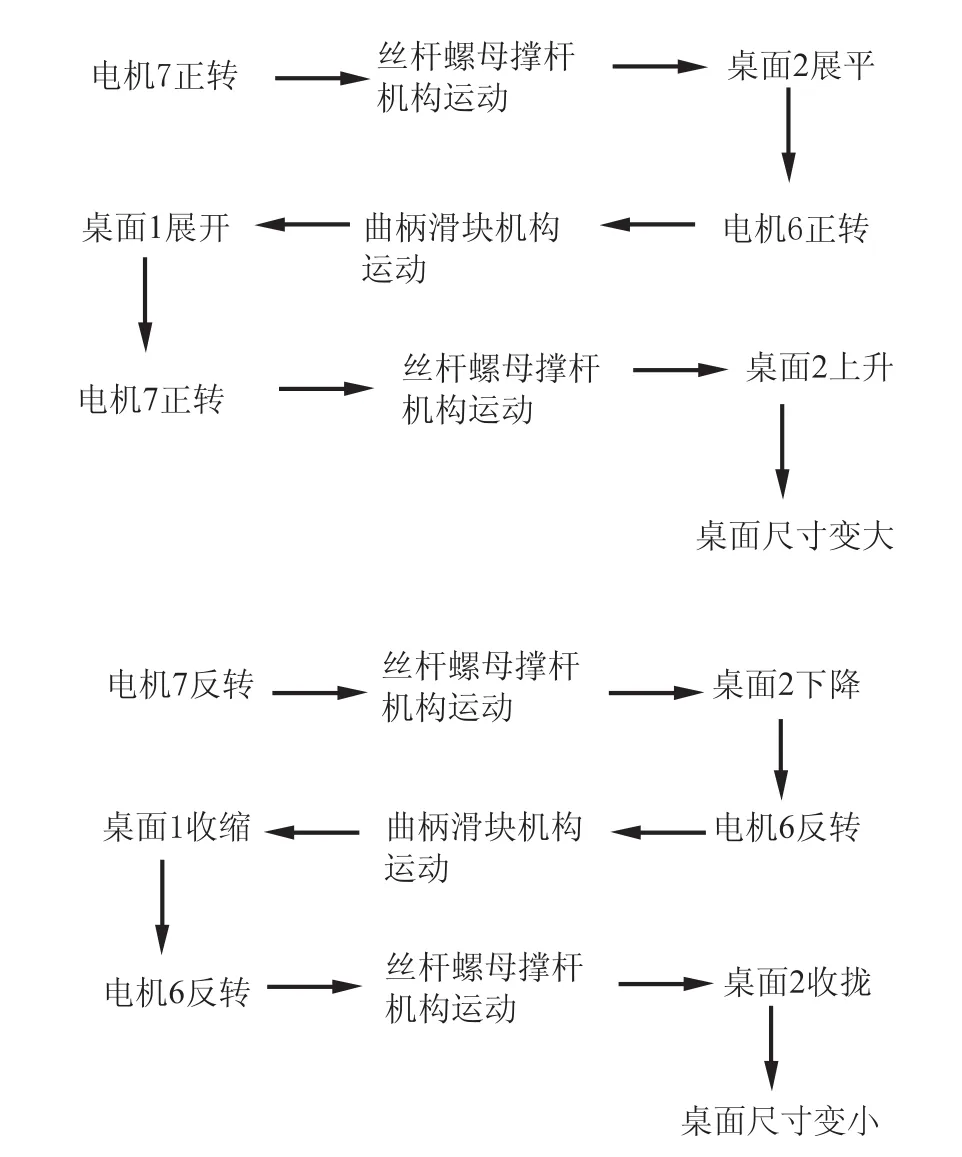
图2 机构运动传递简图Fig.2 A diagram of the organization movement
2 运动机构的设计
2.1 曲柄滑块机构的设计
曲柄滑块机构是一种用曲柄和滑块来实现转动和移动相互转换的平面连杆机构,也称曲柄连杆机构,其与机架构成移动副的构件为滑块,通过转动副联接曲柄和滑块的构件为连杆,曲柄滑块机构又分为对心曲柄滑块机构和偏置曲柄滑块机构[4-5]。
图1所示的自动伸缩桌采用对心曲柄滑块机构,其运动简图如图3所示,其中曲柄和连杆的材料选用均为10 mm厚度的亚克力板。通过对曲柄滑块机构的运动做出分析计算,以此来确定曲柄和连杆的设计尺寸,如下所述[6-8]。
由图3可知任意时刻滑块运行距离、滑行速度、滑行加速度如下:
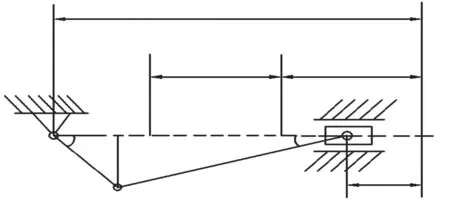
图3 曲柄滑块机构运动简图Fig.3 A diagram of the movement of crank and slider mechanism
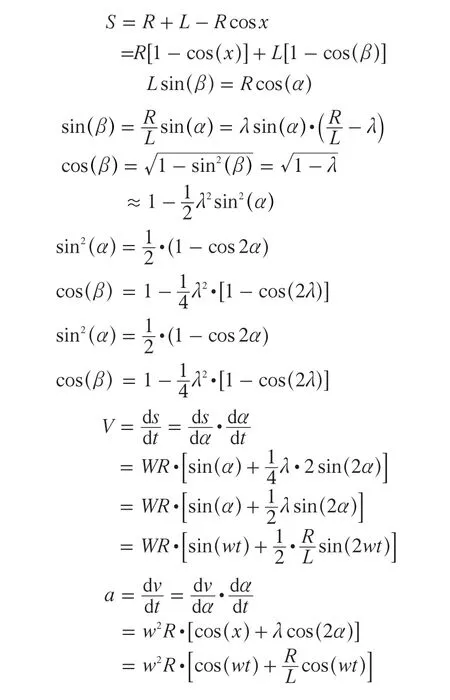
式中:S——任意时刻滑块运行的距离,mm;
λ——R/L;
V——滑块运行速度,mm/s;
a——加速度,m/s2;
w——角加速度,rad/s2;
t——时间,s。
结合第二层桌面尺寸,为了避免曲柄与小桌面发生干涉,所选曲柄尺寸不宜过大,同时考虑到该设计需要用到4个曲柄滑块机构,故将曲柄设计为圆形,既节省空间又便于安装。此外,为了给曲柄滑块机构提供动力,在圆形曲柄中心设计一个直径为10 mm的通孔,同时为了连接曲柄和连杆,需要在曲柄圆周上开4个直径为6 mm的通孔。为保证4个通孔与外圆有一定的距离,所以曲柄实际尺寸相应扩大,其结构简图如图4所示。
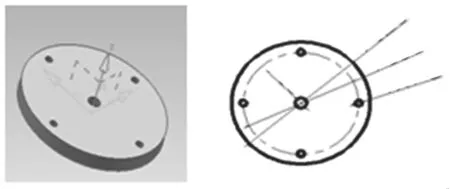
图4 曲柄结构简图Fig.4 A diagram of the crank structure
结合滑块的运动,选择曲柄的长度为50 mm,即4个直径为6 mm的孔分布在直径为100 mm的圆周上。
连杆分别与曲柄和滑块,在连杆两端设计连接孔。同时在设计中为了避免4个连杆在运动过程中发生相互干涉,特将其设计成圆弧形,其结构简图如图5所示。
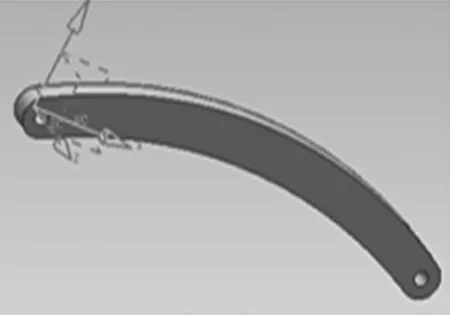
图5 连杆结构简图Fig.5 A diagram of the linkage structure
为保证桌面顺利展开和收拢,根据导轨的长度可知,连杆长度须大于120 mm,故选择连杆长度为180 mm。
2.2 丝杆螺母撑杆机构的设计
丝杆螺母撑杆机构的主要作用是实现第二层桌面的展平上升和收拢下降,主要由丝杆螺母、十字连接架、撑杆、鱼眼接头、十字板托等组成[9],其结构原理简图如图6所示。
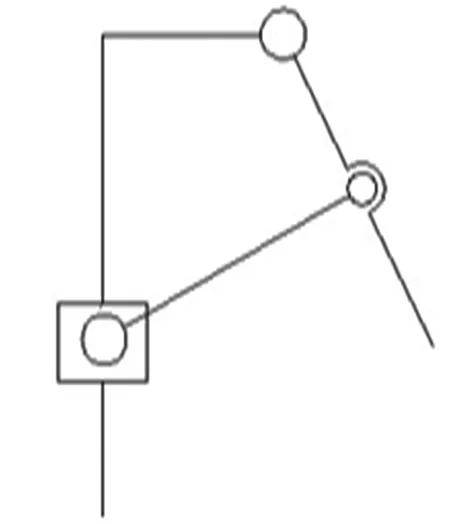
图6 丝杆螺母撑杆机构原理图Fig.6 Mechanism schematic of the screw shaft brace
如图6所示,步进电机带动丝杆旋转,进而实现螺母的直线运动,螺母再带动撑杆运动,第二层桌面在撑杆的力的作用下达到展平上升的目的。其中撑杆两端分别连接桌面和十字连接架。丝杆螺母撑杆机构实物如图7所示。

图7 丝杆螺母撑杆机构Fig.7 Mechanism of the screw nut brace
丝杆螺母机构又称螺旋传动机构。主要将旋转运动变换为直线运动或将直线运动变换为旋转运动。其中包括以传递能量为主 (如螺旋压力机、千斤顶等),以传递运动为主(如机床工作台的进给丝杆);还有调整零件之间相对位置的螺旋传动机构等。在丝杆螺母撑杆机构中丝杆螺母起传动作用,将旋转运动变换为直线运动,它是构成丝杆螺母撑杆机构的重要组成部分。其结构如图8所示,自动伸缩桌中所选用为外购的T8梯形丝杆,其在运动过程中具有自锁特性,其结构参数如表1所示。

图8 丝杆螺母Fig.8 Screw nut
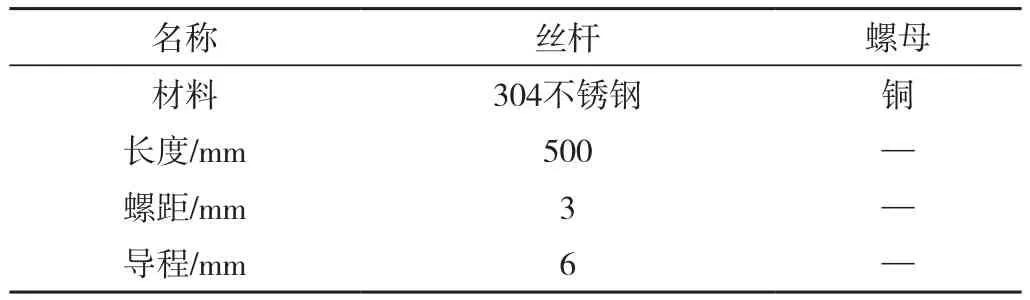
表1 丝杆螺母副参数Tab.1 Screw nut auxiliary parameters
在丝杆螺母撑杆机构中撑杆主要起支撑作用,实现第二层桌面的变形,由于撑杆两端分别连接桌面和十字连接架,所以必须参考连接件来选取确定撑杆,由于滑块和第一层桌面连接时也用到了撑杆,为了方便采购,决定此处撑杆也选取M6丝杆。通过计算,4根撑杆长度均为450 mm。
2.3 连接件的选择
1)螺栓的选择。设计中有多处使用到螺栓连接,曲柄与连杆的连接就用了螺栓连接。曲柄和连杆上加工的是直径为6 mm的通孔,曲柄和连杆厚均为10 mm,所以选取M6×25的粗牙全螺纹六角头螺栓(GB/T 5783—2000),共采购4个[10]。此外丝杆螺母撑杆机构中也用到了M6的螺栓,其中连接长度大于30 mm,所以选取M6×40的粗牙全螺纹六角头螺栓(GB/T 5783—2000),共采购12 个[10]。
2)丝杆的选择。桌面和滑块的连接支撑件使用丝杆,鉴于加工零件中所有螺纹孔都是M6的螺纹通孔,所以选取的丝杆都是M6的。由于桌面总共分为两层,每个小块桌面用4点支撑,所以每部分桌面的支撑件有4根丝杆。
第一层正方形桌面由滑块支撑,正方形桌面距离滑块150 mm,所以选取正方形桌面的连接丝杆长度为150 mm,共16根。
第二层小桌面与丝杆螺母撑杆机构连接,考虑到桌面实际尺寸以及桌面运动距离,选取丝杆长度为450 mm,共4根。
步进电机与曲柄的连接也需要用到丝杆,曲柄中心孔直径为10 mm,考虑到曲柄厚度以及联轴器规格,选取M10丝杆,长度为50 mm。
3)联轴器的选择。步进电机分别与T8丝杆螺母和M10丝杆连接,步进电机轴的直径为5 mm,所以选择5×8和5×10的联轴器各一个。
3 自动伸缩桌控制系统的设计
3.1 电机的选择
由于步进电机工作原理易学易用,成本低、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此在该设计中选用步进电机。步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于微电脑发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。
步进电机的选择主要是以负载的阻力矩为依据,只要电机的扭矩大于负载力矩即可。在该设计中通过估算来确定负载阻力矩。计算中主要考虑摩擦阻力,在设计中选取的是滚珠系列直线导轨滑块,其摩擦系数为0.05~0.08,计算中取其值为0.065。

式中:F——摩擦阻力, N;
μ——摩擦系数;
M——工作负荷(即为桌面重力),N。
式中:T——阻力矩,N·m;
L——阻力作用点到转轴距离,m。
则T=µ×M×L=0.065×1.7×9.8×0.177=0.19 ( N·m)
电机选择外购,通过对比价格、质量、安装尺寸等因素,最终选择Y42BYG34-1.3A步进电机,其参数如表2所示。

表2 步进电机参数Tab.2 Stepper motor parameters
3.2 电机驱动模块
步进电机不能直接接到工频交流或直流电源上工作,而必须使用专用的驱动器。步进电机和步进电动机驱动器构成步进电机驱动系统。步进电机驱动器的原理,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。为配合步进电机正常使用,该设计中选择L298 N电机驱动板模块,其结构如图9所示,其参数如表3所示。
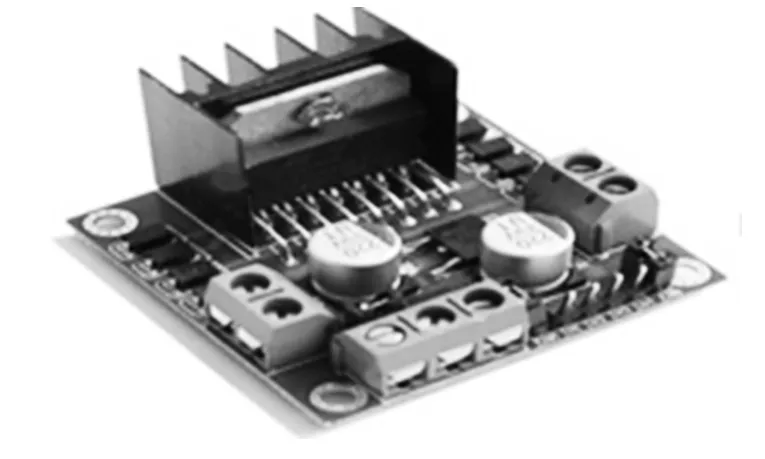
图9 电机驱动模块Fig.9 Motor drive module

表 3 驱动模块参数Tab.3 Drive module parameters
3.3 控制模块
综合考虑已选用的步进电机和驱动模块,最终选取Arduino UNO R3 开发学习板,如图10所示。其功能如下:
1)针脚变动:在AREF针脚旁加了两个C针脚(SDA和SCL,只是Analog 4和5的copy,并不是额外的I2C接口),另外,在RESET旁边也加了两个针脚,一个是IOREF,能让扩展板适应板载电压,这个针脚只是告诉扩展板目前的板载电压是多少(比如UNO是5 V,可以看成电源针脚的copy,并不提供电平上拉),另一个是以后待用的占位针脚。
2)更稳定的RESET电路。RESET键位置也变了,被移到了靠近USB接口的板角处,更方便按。
3)ATmega16U2代替了8U2,这个更新是为USB接口芯片服务的,理论上它让UNO能模拟USB HID,比如 MIDI/Joystick/Keyboard。

图10 Arduino UNO R3 开发学习板Fig.10 Arduino UNO R3 develop learning board
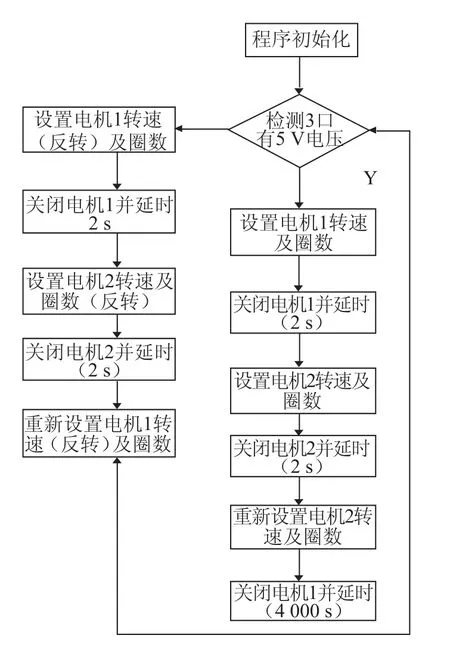
控制组件选购完成之后,根据运动仿真数据进行控制编程,具体程序结构如下:
4 结语
通过单片机和机械机构的合理结合充分实现了桌具的自动伸缩功能,对自动伸缩桌具的机械原理进行探讨与结构分析,并基于现有的自动伸缩桌具的结构原理进行相关的设计,得出以下结论:
通过对自动伸缩桌具的机构以及原理分析,通过使用三维建模软件UG进行建模仿真,最终确定以支架固定桌面延展式机构为研究对象。
利用步进电机、电机驱动模块、单片机所组成的控制系统,通过控制电机的正反转,能实现桌面伸缩扩张。
以支架固定桌面延展式桌具为研究对象,经由运动学分析和零件尺寸设计,说明该次设计的正确性以及可行性。
基于以上结论可知,通过3D仿真证明这种结构的伸缩桌可以通过单片机的控制实现自动伸缩的功能,为人们提供了科学的设计方案。
[1]张春艳,陈文平.便携产品结构设计研究[J].重庆科技学院学报(自然科学版),2012(6):118-120.
[2]张凌浩.产品的语意[M].北京:中国建筑工业出版社,2009.
[3]谭淑敏.桌子“变形记”[J].家具与室内装饰,2012(7):76-79.
[4]王宁侠.机械设计[M].北京:机械工业出版社,2010.
[5]刘善林,胡鹏浩.曲柄滑块机构的运动特性分析及仿真实现[J].机械设计与制造,2008(5):79-80.
[6]杜力,任亨斌,黄勇刚,等 平面连杆机构曲柄调速结构设计[J].图学学报,2013(5):20-24.
[7]宋亮,赵鹏兵.曲柄滑块机构的运动精度分析与计算[J].科学技术与工程,2011(10):2201-2205.
[8]刘善林.曲柄滑块机构中滑块最大速度的位置探讨[J].机械,2008(7):18-19,42.
[9]张彪,叶军,鲁翔,等.一种丝杆螺母机构型机械手的设计[J].中国西部科技,2010(15):31-32.
[10]杨黎明,黄凯,李恩至.机械零件设计手册[M].北京:国防工业出版社,1993.
猜你喜欢
中国修船(2022年4期)2022-10-13
橡塑技术与装备(2022年10期)2022-10-03
铁道车辆(2022年1期)2022-03-09
有色金属材料与工程(2021年4期)2021-11-27
舰船科学技术(2021年4期)2021-05-17
装备维修技术(2020年4期)2020-11-23
科学技术创新(2020年31期)2020-10-30
设备管理与维修(2019年22期)2019-12-19
化工设计通讯(2017年7期)2017-07-07
中南大学学报(自然科学版)(2016年2期)2017-01-19