
基于凸轮自动机的试验装置设计和动力学分析
2017-04-28 01:12陈雷,李强,刘武
兵器装备工程学报 2017年4期
陈 雷,李 强,刘 武
(1.中北大学 机电工程学院,太原 030051; 2.中国兵器工业第二○八研究所,北京 102202)
【装备理论与装备技术】
基于凸轮自动机的试验装置设计和动力学分析
陈 雷1,李 强1,刘 武2
(1.中北大学 机电工程学院,太原 030051; 2.中国兵器工业第二○八研究所,北京 102202)
基于某武器凸轮自动机的机构运动原理,设计了一套自动机机构运动状态试验装置,用于测试并检测供输弹过程中自动机机构的运动规律防止其在供输弹过程出现卡滞现象,利用UG软件建立了三维模型,并基于多体动力学和刚柔耦合理论对该试验机构进行了运动学仿真分析,通过对比分析不同转速下试验机构关重件的运动规律,可以看出该种新型试验机构运转稳定,证明该机构的设计方法可行。
凸轮自动机;试验装置;结构设计;刚柔耦合分析
凸轮在机械行业的应用非常广泛,在武器上也有很多特殊应用,随着社会矛盾的日益升级和恐怖主义的肆意猖獗,武器的发展和应用显得尤为重要[1],对于使用凸轮自动机的武器而言,为了提高武器的使用效能,就要测试凸轮自动机的机构运动规律及相关受力情况,以便对武器结构进行改进。本研究基于一种凸轮自动机的机构工作原理,设计了一套新型的自动机机构运动状态试验装置,通过调整机构位置并添加测试元器件,实现测试试验机构的结构设计,利用动力学析验证新机构的可行性和稳定性[2],对同样使用凸轮自动机武器的研究和发展具有一定的参考价值。
1 凸轮自动机机构组成和工作原理
凸轮自动机采用外能源驱动,主要包括拨弹机构和压弹脱链机构,利用凸轮曲线槽和回转机构实现机构的循环往复运转,实现连续射击。
如图1所示:电机驱动滚筒,滚筒曲线槽和滑板辊子驱使曲线槽滑板在机匣导槽的约束下做前后直线运动。曲线槽滑板上表面加工有平面曲线槽,并通过曲臂辊子带动曲臂绕回转轴旋转,带动另一端的拨弹滑板做直线拨弹运动,拨弹齿越过弹链节拨弹。拨弹到位以后,滚筒前端的凸轮开始触动顶杆,驱使顶杆带动滑块做竖直方向直线运动(滑块的运动由机匣上竖直方向的导槽控制),滑块上固定的连接销带动回转杠杆绕轴回转,杠杆的另一端带动压弹齿在脱链杆导槽中做竖直运动,压弹齿在弹和弹链之间,弹链挂在脱链杆上,当压弹齿运动到最下端的极限位置时,弹链完成脱弹,接着回转杠杆在凸轮和扭簧的作用下复位,拨弹滑板继续带动拨弹齿拨弹。至此,整个自动机完成了一个循环的拨弹和压弹脱链。
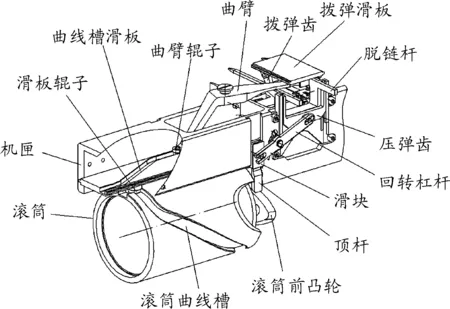
图1 凸轮自动机关重件结构简图
2 试验装置结构设计
若要测试机构的运动规律,必须添加测试需要的元器件,而原凸轮自动机结构十分紧凑,无法添加,所以设计一套新型的凸轮自动机机构运动规律测试试验装置,其中凸轮自动机中拨弹机构的拨弹行程和拨弹速度由曲线槽滑板上表面曲线槽的位移和曲臂的回转半径决定;压弹脱链机构的压弹行程和压弹速度由滚筒前端凸轮的最大偏心距和回转杠杆的回转半径决定,因此在保证以上机构运转一致性的情况下,添加测试元件,实现运动参数[3]的测试。
2.1 机构的组成及工作循环
试验机构的设计要满足质量轻、结构紧凑、操作方便快捷等特点。试验装置主要由滚筒机构、拨弹机构和压弹脱链机构组成,滚筒一方面带动拨弹滑板拨弹到位,另一方面驱使压弹齿压弹脱链。结构设计中应保证拨弹机构和压弹脱链机构的运动规律与原枪的机构运动规律一致,这样才能保证测试结果的正确性。
如图2所示,电机驱动滚筒,电机的输出端和滚筒的输入端之间利用扭矩传感器测试自动机的扭矩变化规律,滚筒筒身上加工的曲线槽驱动曲线槽滑板沿机匣导槽方向做直线运动,驱动曲臂下滑板在机匣盖导槽的限制下做垂直于曲线槽滑板运动方向的运动。曲臂下滑板带动曲臂做回转运动,曲臂上滑板与拨弹滑板之间固定连接有拉压力传感器和加速度传感器。曲臂回转带动拨弹滑板拨弹,同时可以反映拨弹机构的拨弹加速度和拨弹力的变化规律。另外固定在一边拨弹行程方向上的激光位移传感器可以测出拨弹滑板的拨弹位移变化。拨弹到位后,曲线槽滑板、曲臂和拨弹滑板等处于静待状态,滚筒前端的凸轮机构运动到位,如图2所示,凸轮开始驱动顶杆和滑块沿机匣竖直方向的导槽做直线运动。此时与滑板固连的销轴带动回转杠杆回转,回转杠杆带动压弹滑板做竖直方向直线运动。压弹滑板与压弹齿之间通过连杆固连有拉压力传感器和加速度传感器,可以测试压弹脱链过程中力和加速度。另外底端固定的激光位移传感器(图中未标出)可以测试压弹滑板的压弹行程。压弹脱链过程弹链在脱链杆上端,弹在脱链杆下端。当弹和弹链拨弹到位时,压弹齿正好卡在弹和弹链之间,压弹滑板向下运动,带动压弹齿完成压弹脱链。
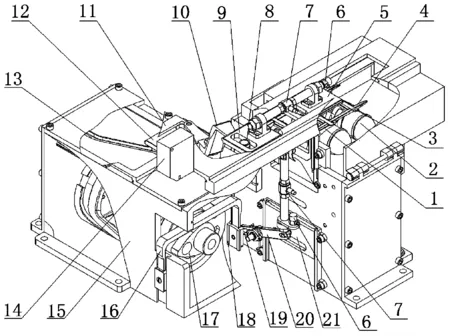
1.压弹齿; 2.模型弹; 3.弹链; 4.脱链杆; 5.拨弹滑板; 6.加速度传感器; 7.拉压力传感器; 8.曲臂上辊子; 9.曲臂上滑板; 10.曲臂; 11.机匣上盖12.曲臂下滑板; 13.曲线槽滑板; 14.激光位移传感器; 15.机匣; 16.顶杆; 17.滚筒; 18.滑块; 19.滑块连接销; 20.回转杠杆; 21,压弹滑板
图2 测试试验装置关重件结构简图
2.2 三维建模
基于凸轮自动机的结构组成和工作原理,利用UG软件对设计装置进行三维建模,为了了解机构的运动规律和相关的运动参数,对原自动机结构重新设计布局,增加构件间的安装空间,通过连杆等辅助零件添加加速度传感器、拉压力传感器和激光位移传感器,并在电机和自动机主轴之间添加扭矩传感器,如图3所示,电机减速器和自动机之间加装了扭矩传感器,自动机工作过程中将弹箱中的弹和弹链拨弹到位,并完成弹链脱弹,机构完成一个运转循环,与此同时,扭矩传感器和其他测试元器件可完成所需测试。
3 试验机构动力学分析
通过ADAMS仿真分析软件对设计机构进行动力学仿真分析[4],将设计的自动机结构三维模型导入ADAMS软件中,设计滚筒的最小转速为60 r/min,最大转速为300 r/min,分析拨弹到位和压弹脱链运动过程机构的运动规律,将弹链柔性化,对弹链进行网格划分,通过有限元软件进行模态分析计算并得到mnf模态文件,再通过ADAMS/Flex模块导入ADAMS/View中,进行刚柔耦合动力学仿真分析[5]。
根据仿真分析可知,在两种极限转速下,曲线槽滑板和拨弹滑板传动平稳,拨弹机构运行稳定,满足设计要求,能够完成需要的动作,图4~图7给出了不同转速下曲线槽滑板和拨弹滑板的位移速度曲线。曲线槽滑板通过曲臂控制拨弹滑板的运动,转速为60 r/min时,曲线槽滑板和拨弹滑板的运行速度分别约为0.6 m/s和0.5 m/s;转速为300 r/min时,速度分别约为3 m/s和2.5 m/s,运行位移分别为157 mm和63.5 mm,不随转速的改变发生变化,拨弹机构的运行稳定,满足设计要求,能够完成需要的动作。

图4 60 r/min转速下曲线槽滑板的位移速度曲线

图5 300 r/min转速下曲线槽滑板的位移速度曲线

图6 60 r/min转速下拨弹滑板的位移速度曲线

图7 300 r/min转速下拨弹滑板的位移速度曲线
压弹齿的运动由顶杆通过回转杠杆控制,顶杆向上运动时压弹齿开始向下压弹脱链。通过仿真结果,转速为60 r/min时,顶杆和压弹齿的运行速度分别为0.25 m/s和0.45 m/s;转速为300 r/min时,顶杆和压弹齿的运行速度分别为1.25 m/s和2.25 m/s,运行位移分别为26 mm和44 mm,都不随转速的改变发生变化,压弹脱链机构的运动规律满足设计要求,实现了设计功能[6]。图8~图11给出了顶杆和压弹齿的位移速度曲线。
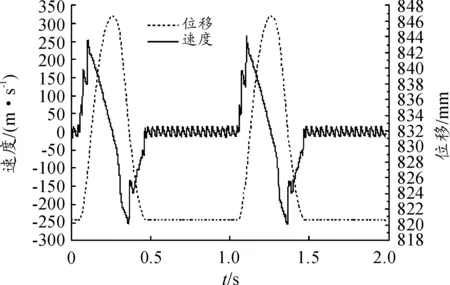
图8 60 r/min转速下顶杆的位移速度曲线
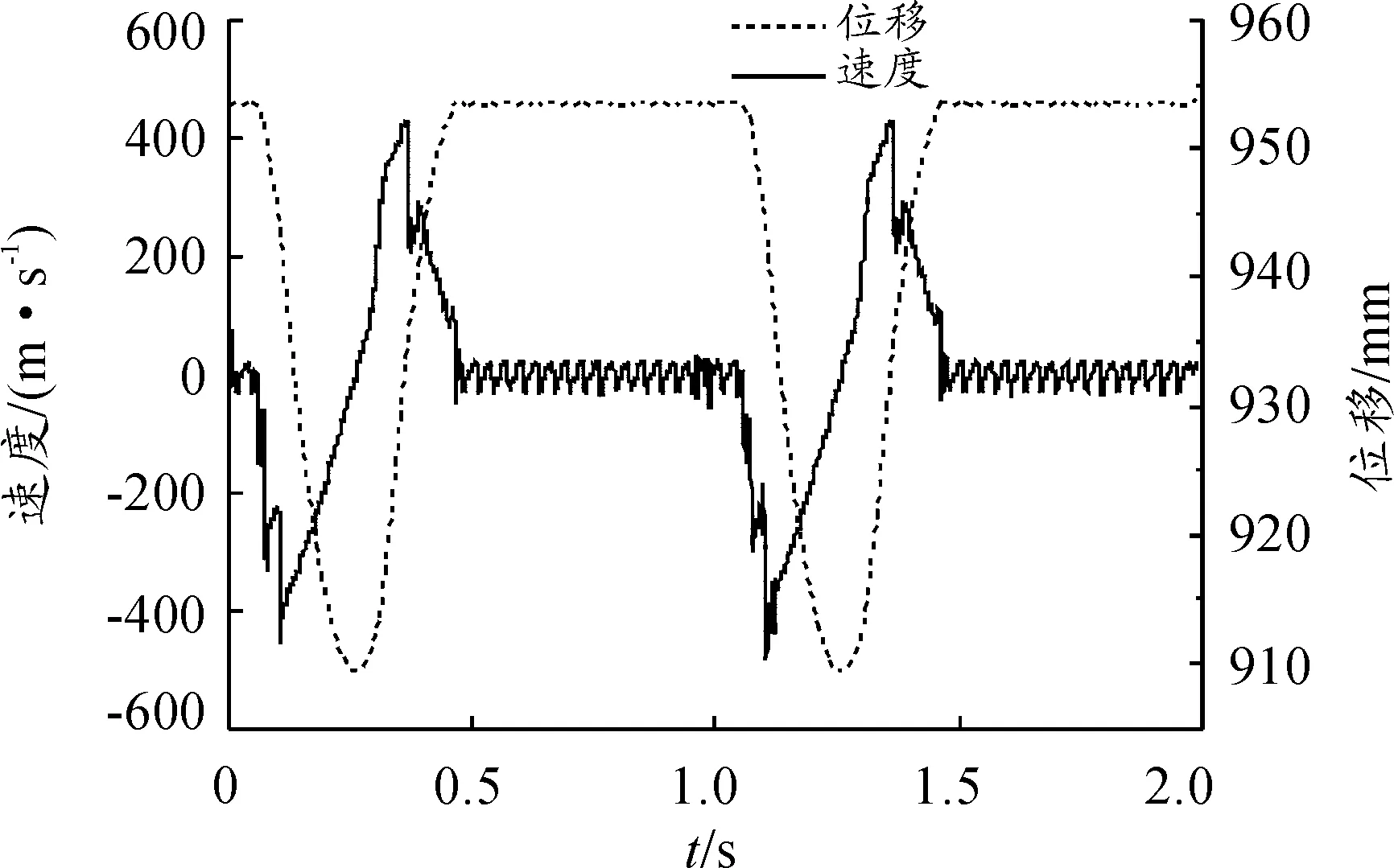
图10 60 r/min转速下压弹齿的位移速度曲线
在两种转速下,分别进行两个周期的仿真分析,第一个周期为机构空行运转,即没有带弹运行,第二个周期机构带弹运行,拨弹滑板完成拨弹到位,并由压弹齿完成压弹脱链。对比两个周期的机构位移速度变化可以看出,拨弹滑板和压弹齿的速度变化与滚筒的转速变化成正比关系,而且各机构在最小转速或最大转速下两个仿真周期内的运动变化规律一致,无跳动,说明该试验机构设计可靠,满足运动要求。
4 结束语
设计了一种新型凸轮自动机试验装置,使用ADAMS软件进行了动力学仿真分析。仿真结果表明该实验装置各机构运行平稳,能够完成测试所需的运动需求。该种结构设计方法也可用于其他类似机构的设计,具有一定的工程实践参考价值。
[1] 薄玉成,王惠源,李强.自动机结构设计[M].北京:兵器工业出版社,2009:127-166.
[2] 濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2009:3-20.
[3] 刘吉,周汉昌.自动机运动规律测试系统的研制[J].光学与光电技术,2000(5):23-25.
[4] 郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008:238-245.
[5] 陈灿,钱林方,石海军,等.基于刚柔耦合的某弹药供输机构振动分析[J].火炮发射与控制学报,2013(2):59-62.
[6] 鲁刚,何云峰,王昭,等.自动机运动模拟装置设计及实验分析[J].南京理工大学学报,2012(5):810-813.
(责任编辑 周江川)
Design and Dynamic Analysis of a Test DeviceBased on the Cam Automata
CHEN Lei1, LI Qiang1, LIU Wu2
(1.School of Mechatronic Engineering,North University of China,Taiyuan 030051, China;2.No. 208 Research Institute, China Ordnance Industries,Beijing 102202,China)
For a weapon automata ammunition feeding process of one card lag phenomenon, based on the mechanism motion principle of the CAM automata, we designed a new set of automata organ motions test device, and used it for test and inspect the movement of institutions of the automata in the ammunition feeding process, and the three-dimensional model was established based on UG software, and we carried on the kinematics simulation analysis to the test group based on the theory of multi-body dynamics and the rigid-flexible coupling. Through the comparison analysis of the test institutions key-module motion law under different radio frequency, it can be seen that the new test institutions operation is stable and proves that the structure design method is feasible.
cam automata; test device; structure design; rigid-flexible coupling analysis
2016-11-29;
2016-12-26
国防科研基金资助项目(A0820132003)
陈雷(1989—),男,硕士研究生,主要从事武器系统结构设计和动力学仿真技术研究。
10.11809/scbgxb2017.04.015
陈雷,李强,刘武.基于凸轮自动机的试验装置设计和动力学分析[J].兵器装备工程学报,2017(4):68-71.
format:CHEN Lei,LI Qiang,LIU Wu.Design and Dynamic Analysis of a Test Device Based on the Cam Automata[J].Journal of Ordnance Equipment Engineering,2017(4):68-71.
TJ203
A
2096-2304(2017)04-0068-04
猜你喜欢
延边大学学报(自然科学版)(2021年2期)2021-07-29
软件学报(2019年12期)2019-10-26
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
故事作文·高年级(2018年12期)2018-12-17
科技视界(2018年21期)2018-12-10
河南科技(2018年7期)2018-09-10
小学生导刊(2018年4期)2018-04-18
小猕猴智力画刊(2017年3期)2017-03-24
作文与考试·小学高年级版(2016年2期)2016-09-10
