五相容错式磁通切换永磁电机SVPWM控制
2017-05-04 07:15唐红雨赵文祥姜庆旺
微特电机 2017年7期
唐红雨,赵文祥,姜庆旺
(1.镇江市高等专科学校,镇江212003;2.江苏大学,镇江212013)
0 引 言
永磁同步电机由于其性能优越,已引起人们的重视,随着稀土永磁材料加工技术和电机制造技术的发展,应用也越来越广泛于各行各业[1-2]。但三相电机自身容错性能不佳,而多相永磁电机兼具高效率、高功率密度、强容错等优点,可用于舰船推进、风力发电、电动汽车、航空航天、军事设备等场合。相数的增加使多相电机可以提供比三相电机更多的控制自由度,采用全桥驱动,可以提高控制性能,减小转矩脉动的幅值,实现低压大功率[3]。同时,逆变技术的发展也使多相逆变系统的实现成为可能。近年来发展起来的磁通切换永磁(以下简称FSPM)电机,由于其永磁体安装于定子上,易于冷却,降低永磁体过热所引起的退磁风险[4],使电机的结构更简单、制造成本更低,适合高速运行,而五相容错式磁通切换永磁(以下简称FT-FSPM)电机具有高容错性和高可靠性等优点,使其成为学者研究的热点[5]。
目前对电机控制的方法主要有矢量控制和直接转矩控制法,其中有空间矢量脉宽调制(以下简称SVPWM)算法[6];或者采用改进的相邻最近四矢量SVPWM算法来合成参考电压矢量[7],抑制三次谐波[8];采用基于调制函数的五相SVPWM等效算法实现五相电压源型逆变器控制[9];以转差角频率调控定子电压矢量,实现对转子磁链和电磁转矩的控制[10];通过跟踪最小占空比,得到最终的五相桥臂占空比[11];也有采用改进型的SVPWM算法,将输入的两路正交正弦电压进行矢量合成,得到开关作用时间[12];但这些SVPWM方法在五相容错电机的应用还不多见。本文分析了FT-FSPM电机的空间电压矢量构成,采用相邻最近四矢量算法设计了基于SVPWM的电机系统的控制策略,可以有效实现6FT-FSPM电机的控制,使系统具有较好动态性能指标。
1 五相FT-FSPM电机
本研究对象为10/19极的FT-FSPM电机,其绕组结构如图1所示,该电机的定子齿为10槽,转子极数为19极。以A相绕组为例,绕组A1穿过两个定子齿,与绕组A2相串联组成A相绕组,容错齿使电机在故障状态下具有容错功能[13]。其中永磁体切向交替插入定子齿中,即绕组A1中永磁体充磁方向与C2,D2相反,从而产生聚磁效应。
FT-FSPM电机作为定子永磁型电机的一种,尽管相对于传统的永磁同步电动机、永磁无刷直流电动机,其永磁体安放位置不同。但其空载永磁链和空载反电势均呈双极性正弦分布,具有高度的正弦性,坐标系如图2所示。容错性磁通切换永磁电机与转子型永磁电机坐标系分析方法一样,所以定子坐标系下的方程:

五相电流如下:

式中:定子电压矩阵Us=[uaubucudue]T;电阻矩阵Rs=rs×E5×5;电流矩阵 Is=[iaibicidie]T;总磁链矩阵ψs=[ψaψbψcψdψe]T;Ls为电感矩阵;ψm为永磁链;Im为电流幅值;pr为转子极对数,pr=19。
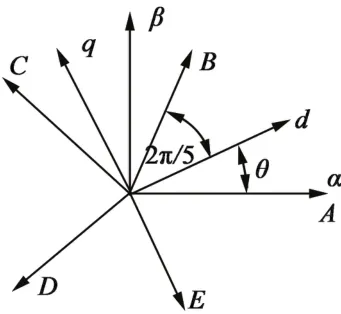
图2 五相TF-FSPM基波坐标系
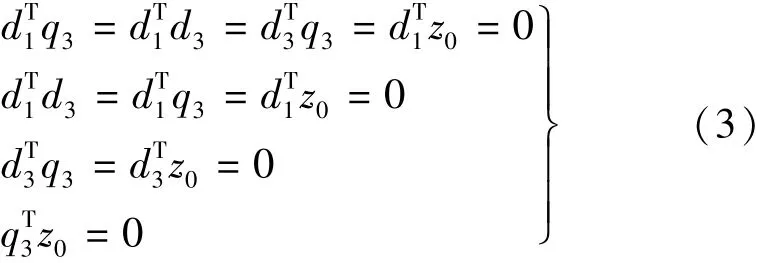
在分析转子坐标系时,我们需要考虑基波空间d1-q1坐标系和三次谐波空间d3-q3坐标系,因此选取d1-q1-d3-q3-z0作为参考坐标系,z0是零序分量,把d3-q3-z0作为广义零序分量,基波空间和三次谐波空间相互正交。d1-q1-d3-q3-z0满足以下关系:
d-q坐标系的电流方程:
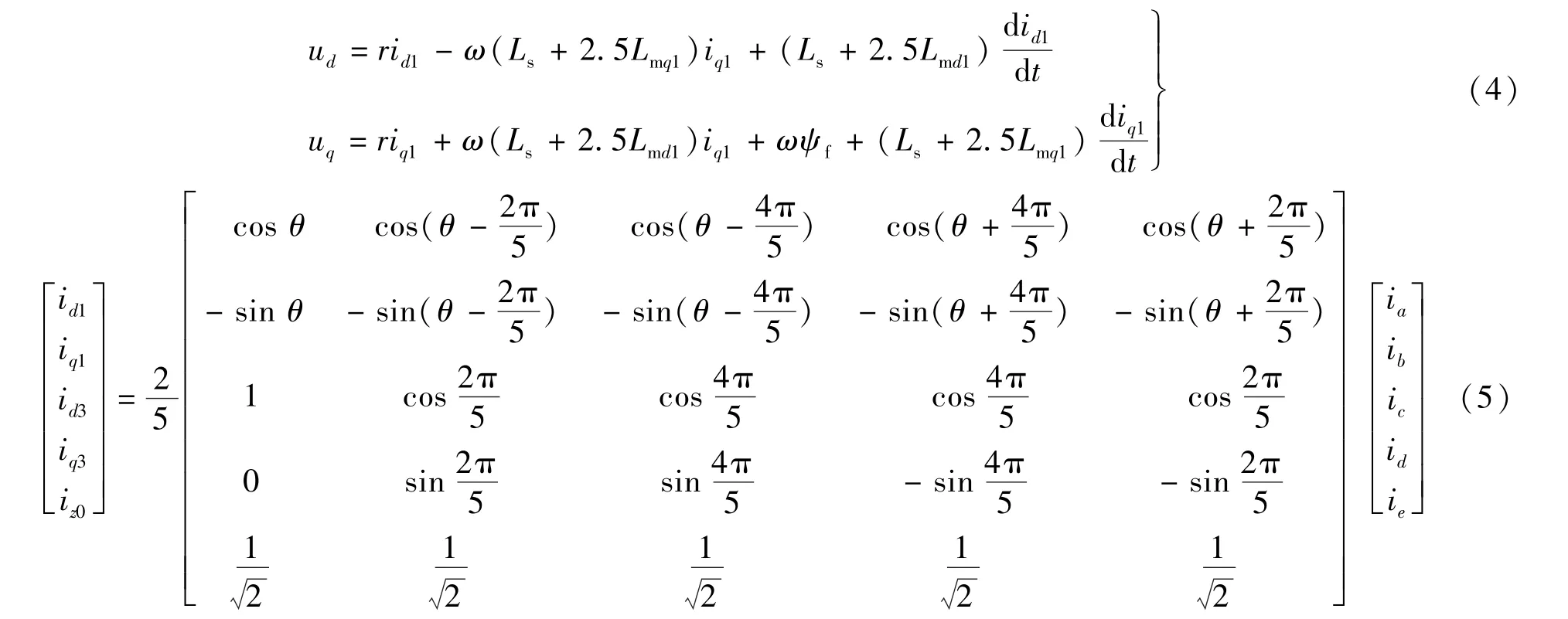
机械运动方程:
式中:对于隐极式FT-FSPM电机,p是电机转子极对数;θ为转子位置电角度;ud,uq,id1,iq1分别为d1-q1轴的电压、电流;id3,iq3分别为d3-q3轴的电流;ω为转子角速度;r为定子电阻;Te为电磁转矩;Tl为负载转矩;Lmd1,Lmq1分别为d,q轴基次绕组互感;ψm为永磁链。
2 五相SVPWM设计
五相FT-FSPM电机逆变系统中有32个空间电压矢量,其中U0,U31为零矢量,其他30个非零电压矢量分为3组,每组10个电压矢量,分大、中、小电压矢量,幅值比为1.6182∶1.618∶1,将360°空间平均分为10扇区。由五相逆变系统的Park变换可知,存在基波d1-q1坐标系和三次谐波d3-q3坐标系,分别以ω,3ω旋转,存在3个子空间,分别为α1-β1子空间,α3-β3子空间和零序空间,零序空间恒为零,采用幅值不变原则,进行Clarke变换,再将各电压矢量幅值大小进行分类,如表1和图3所示。
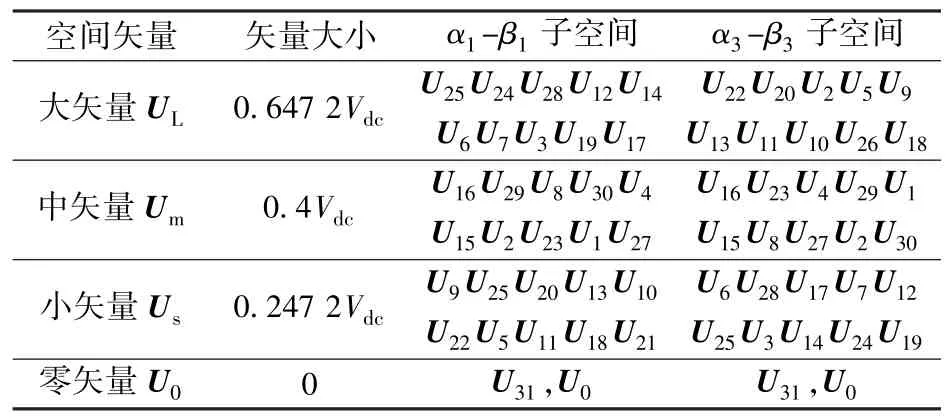
表1 五相系统空间电压矢量表
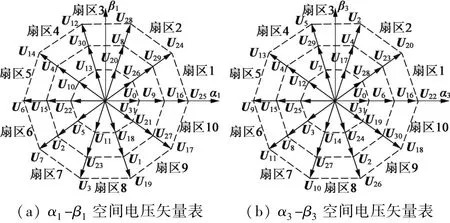
图3 α-β空间电压矢量分布
五相逆变系统进行扇区判断时,需引入5个电压量,建立扇区判断函数,查扇区表进行扇区选择。以第二扇区为例,采用相邻最近四矢量算法(NFV),在一个周期内,电压矢量作用顺序为U0→U29→U28→U24→U8→U31→U31→U8→U24→U28→U29→U0。
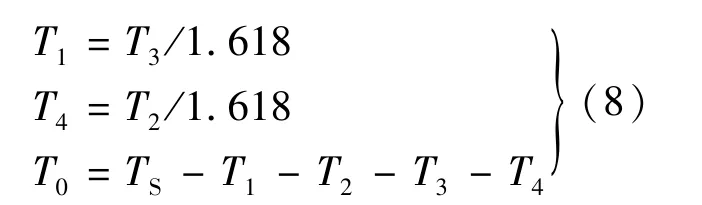
在进行分析时,把α3-β3-0子空间电压矢量为零作为约束条件,大小电压矢量对应,设第二扇区电压矢量U8,U24,U28,U29,一个周期内作用时间分别为T1,T2,T3,T4。从图4中看出,要满足使三次谐波在α3-β3-0空间为零的目的,α1-β1-0空间的大小矢量时间与幅值之比相等,即T3/T1=T2/T4=1.618。
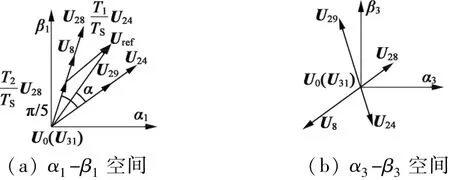
图4 两相α-β坐标系中的电压矢量合成
根据平行四边形法则,第二扇区各个电压矢量作用时间如下:

五相逆变系统的最近四矢量SVPWM算法是通过调节各作用时间使三次谐波成分减少,因而母线电压调制比会有所降低,但逆变器输出电压的谐波成分也有所减少。U8,U24,U28,U29四个矢量的开关状态序列为01000,11000,11100,11101,11111。在扇区过渡时,必须保证只有一组开关切换,可以降低切换开关的损耗。图5为第二扇区开关切换顺序图。但对不同扇区,矢量的作用时间顺序需作相应变化。

图5 第二扇区开关切换顺序图
其它扇区开关顺序计算方法类似,这里不再叙述,对于不同扇区,T1始终表示先作用的矢量在每一个扇区载波周期的作用时间。在计算时,在开辟的内存空间中第一字节存入一个36°的正弦表,然后通过调用计算各基本矢量的作用时间。在进行扇区判断时,只需将步长 Δωt积分,当达到36°时,便使扇区数加1(反转则减1)。在程序设计中要设置频率变化步长,对频率的变化量采取限幅处理,保证每个载波周期只执行一次采样,使频率采样值平稳过渡,可以避免来自于频率指令或负载突变造成的冲击电流,同时也滤除了各种外界的扰动。扇区判断仿真如图6所示,T2,T3为基础矢量作用时间,仿真波形与理论值一样。

图6 基础矢量作用时间和扇区判断波形
从图6中看出,电机运行时输出的扇区号值,按1~10的顺序运行,与实际相符。将Ta,Tb,Tc,Td和Te输入到调制模块中,与给定的载波相比较得到五相电压SVPWM脉冲波。其中Ta,Tb如图7所示,图8为五相相电压波形。
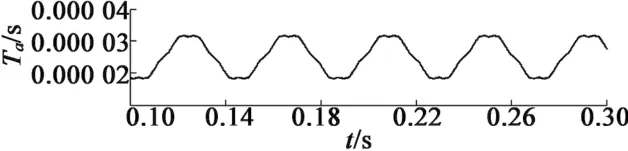
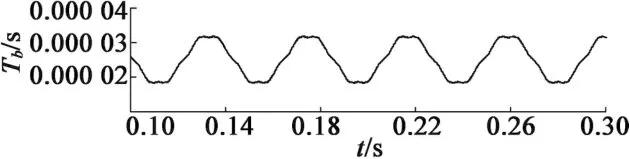
图7 五相比较时间Ta,Tb仿真波形图

图8 五相相电压仿真图
由图7可以看出,采用NFV方式的调制的Ta和Tb波形是马鞍波,以及五相相电压波形与理论波形相同。
从式(5)可以看出,对于五相FT-FSPM电机,Te只与基波空间d1-q1轴电流iq1有关,可通过调节iq1控制Te,对d1-q1-d3-q3空间中的电流实行闭环控制,采用id1=0控制策略,对q轴电流iq1进行控制,可以实现系统控制。
3 试验结果
为验证算法的可行性,在MATLAB仿真的基础上,在实验室搭建了电路,如图9所示。五相FT-FSPM样机参数如下:额定功率P=3.5 kW,相电压200 V,额定转速n=600 r/min,额定转矩Te=22.8 N·m,定子电阻rs=2.56 Ω,绕组电感Lmd1=Lmq1=36 mH,转动惯量J=0.000 62 kg·m2,摩擦系数B=0.000 31 N·m·s,永磁磁通ψm=0.183 Wb。主要器件包括核心芯片DSP2812、三菱IPM、2048线的光电编码器、磁粉制动器、扭矩传感器、LEM型电流传感器,实验结果如图10~图12所示。
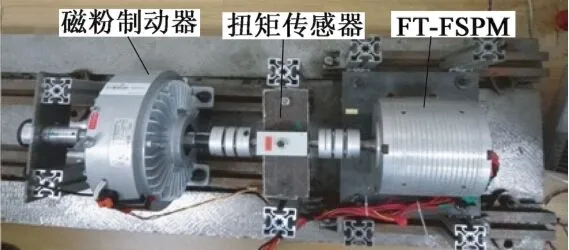
图9 实验装置
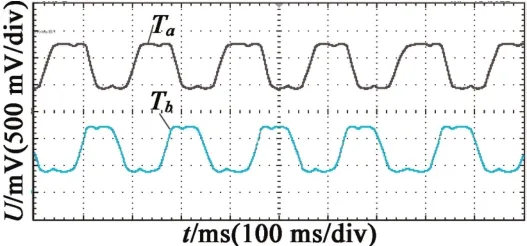
图10 五相比较时间Ta,Tb实测波形
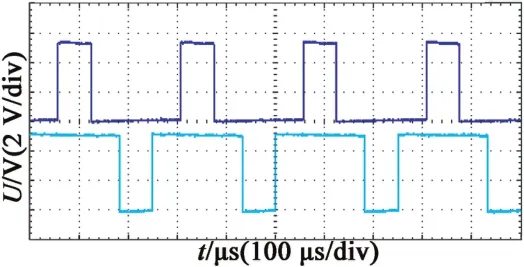
图11 调制模块输出的PWM波形
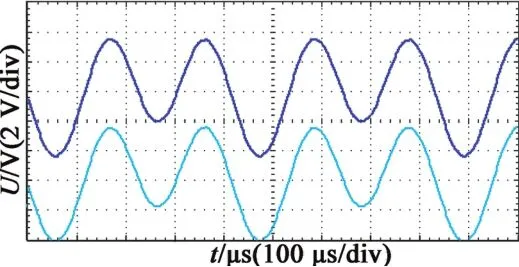
图12 PWM经滤波后的波形
图10为五相比较时间Ta,Tb实测波形,可以看出实测波形与理论波形相同。图11为A相,B相调制模块输出实测PWM波。图12为AB相PWM经滤波后的波形,说明所设计的SVPWM方法符合要求。
4 结 语
本文根据五相FT-FSPM电机特点和数学模型,通过对五相系统的SVPWM调制方法的研究,结合五相电机旋转坐标系空间理论,提出一种基于相邻最近四矢量SVPWM的五相FT-FSPM电机控制方法,通过仿真和实验,验证本方法的可行性,能够满足五相电机系统控制要求。
[1] VU T T,YU D Y,HAN H C.T-S fuzzy-model based slidingmode control for surface-mounted permanent-magnet synchronous motors considering uncertainties[J].IEEE Transactions on Industrial Electronics,2013,61(10):4281-4290.
[2] 唐红雨,刘贤兴.基于无差拍的永磁同步电机直接转矩控制方法研究[J].微特电机,2015,43(3):5-9.
[3] 郝振洋,胡育文,沈天珉.永磁容错电机的直接转矩控制策略[J].电工技术学报,2014,29(3):180-188.
[3] 贾红云,程明,花为,等.基于死区补偿的磁通切换永磁电机定子磁场定向控制[J].电工技术学报,2010,25(11):48-55.
[4] ZHAO Wenxiang,CHENG Ming,ZHU Xiaoyong,et al.Analysis of fault-tolerant performance of a doubly salient permanent-magnet motor drive using transient cosimulation method[J].IEEE Transactions on Industrial Electronics,2008,55(4):1739-1748.
[5] 朱瑛,程明,花为,等.磁通切换永磁电机的空间矢量脉宽调制控制[J].电机与控制学报,2010,14(3):45-50.
[6] 赵品志,杨贵杰,刘春龙.五相电压源逆变器SVPWM优化算法[J].电机与控制学报,2009,13(4):516-522.
[7] 唐俊,王铁成,崔淑梅.五相逆变系统的SVPWM实现方法[J].电工技术学报,2013,28(7):64-73.
[8] 高宏伟,杨贵杰,刘剑.基于调制函数的五相电压源逆变器SVPWM算法[J].电机与控制学报,2014(2):56-61.
[9] MAROUANI K,BAGHLI L,HADIOUCHE D,et al.A new PWM strategy based on a 24-sector vector space decomposition for a sixphase VSI-Fed dual stator induction motor[J].IEEE Transactions on Industrial Electronics,2008,55(5):1910-1920.
[10] 王伟,程明,张邦富,等.最小占空比跟踪法及其在五相逆变器双三相电机系统中的应用[J].中国电机工程学报,2013,33(3):117-124.
[11] 吴丽华,高慧芝,刘政,等.一种改进型的SVPWM算法研究[J].电机与控制学报2013,17(4):57-67.
[12] 高宏伟,杨贵杰,刘剑.五相电压源逆变器的空间矢量脉宽调制方法研究[J].中国电机工程学报,2014,36(18):2917-2925.
[13] 赵文祥,唐建勋,吉敬华,等.五相容错式磁通切换永磁电机及其控制[J].中国电机工程学报,2015,37(5):1229-1236.
猜你喜欢
南北桥(2022年2期)2022-05-31
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
信息安全研究(2018年2期)2018-02-28
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15