
捷联式磁航向测量系统的航向角误差动态特性研究
2017-05-10 13:00李丽锦周志广
传感器与微系统 2017年5期
李丽锦, 周志广, 段 勇
(西北工业大学 第365研究所,陕西 西安 710072)
捷联式磁航向测量系统的航向角误差动态特性研究
李丽锦, 周志广, 段 勇
(西北工业大学 第365研究所,陕西 西安 710072)
在不考虑罗差情况下,建立了捷联式磁航向测量系统的航向角误差模型,并结合无人机磁航向测量系统中框架式垂直陀螺仪的姿态测量特点,将其姿态误差源特征引入误差模型,全面分析了其航向角在不同飞行条件下的动态误差特性。对捷联式磁航向测量系统的航向角误差模型进行了仿真计算,并将仿真结果与飞行实验结果进行了比较分析。结果表明:捷联式磁航向测量系统的航向角误差动态特性符合无人机测量误差特点,能够为工程应用提供直接的理论依据。
捷联式; 磁航向; 动态误差; 陀螺仪; 姿态误差
0 引 言
捷联式磁航向测量系统通常由三轴磁传感器和姿态测量设备组成。三轴磁传感器直接安装在载体座架上,敏感大地磁场沿载体机体坐标的三个磁场分量;姿态测量设备用于敏感载体的姿态角(即俯仰角和倾斜角)。捷联式磁航向测量系统的航向角则根据三个磁场分量和姿态角计算而得,该种配置较传统的磁罗盘结构简单,可靠性高,测量精度大幅提高[1],生产成本却大幅下降。捷联式磁航向测量系统已经在小型无人机的航向测量中占据非常重要的地位,在船只、地面车辆以及智能手机上的应用也越来越广。
本文针对捷联式磁航向测量系统的航向角测量原理,在不考虑罗差情况下,研究动态条件下航向角测量的特性,建立了其误差模型;同时,结合无人机姿态测量的特点,引入框架式垂直陀螺仪的测量误差项,综合分析了在动态条件下无人机磁航向测量系统的航向角误差特性。
1 系统航向角测量原理
地理坐标系(p系):原点在载体重心,X轴指向北,Y轴指向东,Z轴沿地垂线指向地。机体坐标系(b系):原点在飞机重心,X轴指向纵轴方向,Y轴指向飞机右侧,Z轴沿飞机垂直向下。φ,θ分别表示由捷联式磁航向测量系统中框架式垂直陀螺仪测量的飞机横滚角和俯仰角。
捷联式磁航向测量系统中航向角φ可通过大地磁场在飞机机体三轴的磁场分量,并结合飞机的俯仰角θ、横滚角φ计算,然后经过修正后得到。
设Xb,Yb,Zb为大地磁场在飞机机体的三轴磁场分量,Xp,Xp,Zp为大地磁场在当地地理系的三轴磁场分量。
捷联式磁航向测量系统的未经修正航向角φM计算公式如式(1)所示[2]
(1)
式中
2 系统航向角误差模型
(2)
式中 C1,C2为常数,统称为罗差[4]。若不考虑罗差,捷联式磁航向测量系统的航向角误差全部来源于姿态角(即俯仰角θ、横滚角φ)误差,根据二元函数的全微分计算方法,则有[5]
(3)

由于Δθ和Δφ均为小量,有,cosΔφ≈1,cosΔθ≈1,sinΔφ≈Δφ,sinΔθ≈Δθ,则
(4)
将式(4)代入式(3)中得
ΔφM=sinθΔφ-sinφtanβ·Δθ+tanβ·cosφcosθΔφ
(5)
式中ΔφM即为在不考虑罗差情况下捷联式磁航向测量系统的航向角误差模型。
由式(5)可看出,在不考虑罗差情况下,捷联式磁航向测量系统的航向角误差模型中误差源不仅与姿态角误差(Δθ和Δφ)有关,还与当时的姿态角(θ和φ)、航向角φ,以及当地磁倾角β有关。
3 飞机匀速飞行分析
假设飞机匀速飞行,在不考虑罗差的情况下,则当地磁倾角β为定值,当时姿态角 (θ和φ)和航向角φ亦视为定值,框架垂直陀螺仪姿态测量误差(Δθ和Δφ)视为常值误差。因此,在飞机匀速飞行时,捷联式磁航向测量系统的航向角误差φM为常值误差。
4 飞机水平加速运动分析
假设飞机作水平加速飞行,纵向加速度为a,则作用在框架式垂直陀螺仪摆上的惯性力使其沿纵轴偏离地垂线,处于视垂线位置,使纵修正装置将产生错误的修正力矩,使自转轴向视垂线进动而沿横向偏离地垂线,从而会造成框架式垂直陀螺仪的俯仰角测量误差Δθ为[6]
(6)
式中 ta为飞机连续加速时间;Mky为作用在框架垂直陀螺仪外环上修正外力矩;H为框架式垂直陀螺仪的角动量。
由式(6)可看出,由于飞机水平加速所引起的框架式垂直陀螺仪的俯仰角测量误差Δθ与时间成正比。因此,假设飞机在水平加速飞行时,在不考虑罗差的情况下,捷联式磁航向测量系统的航向角计算误差φM主要由框架式垂直陀螺仪的俯仰角测量误差Δθ决定,即随加速时间成线性增长,直至框架式垂直陀螺仪自转轴被错误修正到视垂线位置。如若飞机加速的时间较长,势必引起框架式垂直陀螺仪的俯仰角测量误差Δθ较大,因此,捷联式磁航向测量系统的航向角误差φM较大,应尽量减小该航向角数据在系统中的控制权重。
5 飞机盘旋运动分析
假设飞机作盘旋飞行,由于盘旋角速率ωζ的作用,则沿横向必存在向心加速度,从而存在向心力,这时框架式垂直陀螺仪的摆受到重力和向心力的合力作用,沿横向偏离地垂线,处于视垂线位置, 这时框架式垂直陀螺以横向修正装置将产生错误的修正力矩,使自转轴向视垂线进动而沿横向偏离地垂线,从而造成倾斜角的测量误差Δφ。而且,由于飞机盘旋角速度的影响,还将引起自转轴沿纵向偏离地垂线,从而引起俯仰角的测量误差Δθ,而此时Δφ和Δθ与时间呈正弦变化。因此,当飞机盘旋时,在不考虑罗差的情况下,捷联式磁航向测量系统的航向角误差φM随俯仰角测量误差和倾斜角测量误差变化而变化,即与时间呈周期性正弦变化,此时控制系统应合理调整该航向角数据在系统中的控制权重。
6 仿真与实验结果
以姿态双备份的无人机为例,将高精度光纤组合惯导数据与磁航向测量系统数据进行仿真和实验验证。
6.1 仿真结果
当地磁倾角为52°,提取飞机飞行部分数据,以光纤组合惯导输出的姿态角(θ和φ)为基准,与框架式垂直陀螺仪测量的姿态角对比,计算磁航向测量系统的姿态角测量误差(Δθ和Δφ);并以光纤组合惯导输出的姿态角(θ和φ)和航向角φ为输入,按式(5)仿真计算磁航向测量系统的航向角误差φM。
飞机平飞时,磁航向测量系统的航向角误差仿真结果如图1(a)所示;飞机水平加速时,磁航向测量系统的航向角误差仿真结果如图1(b)所示;飞机盘旋时,磁航向测量系统的航向角误差仿真结果如图1(c)所示。
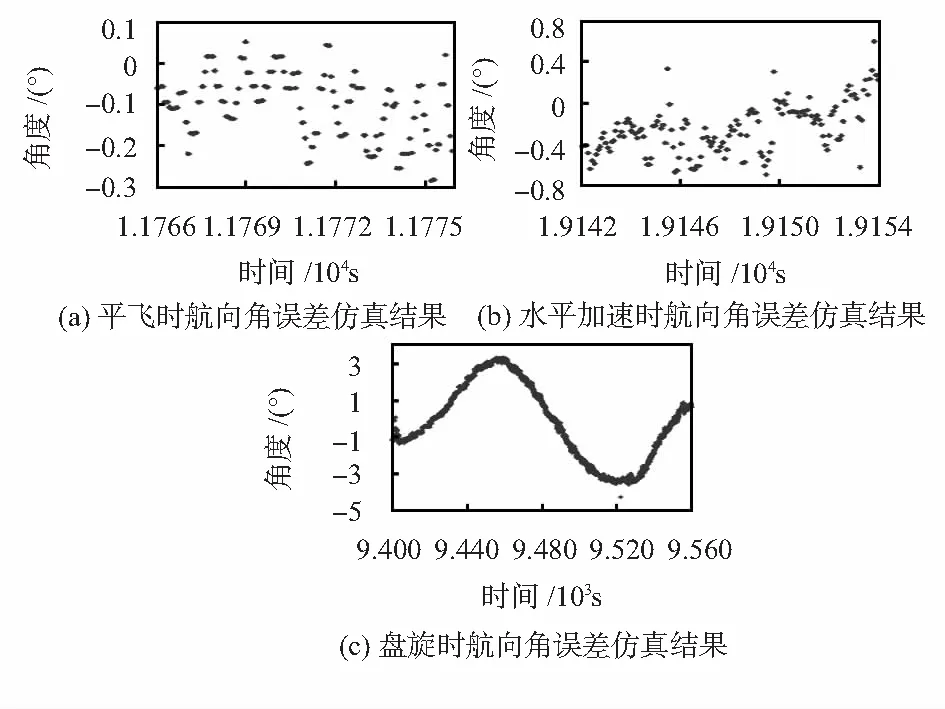
图1 飞行仿真实验结果
6.2 实验结果
以光纤组合惯导的航向角输出为基准,与磁航向测量系统的航向角对比,统计磁航向测量系统的航向角误差实验结果。
1)飞机平飞时,磁航向测量系统的航向角误差实验结果如图2(a)所示; 飞机水平加速时,磁航向测量系统的航向角误差实验结果如图2(b)所示; 飞机盘旋时,磁航向测量系统的航向角误差实验结果如图2(c)所示。
2)光纤组合惯导航向角变化如图3所示。
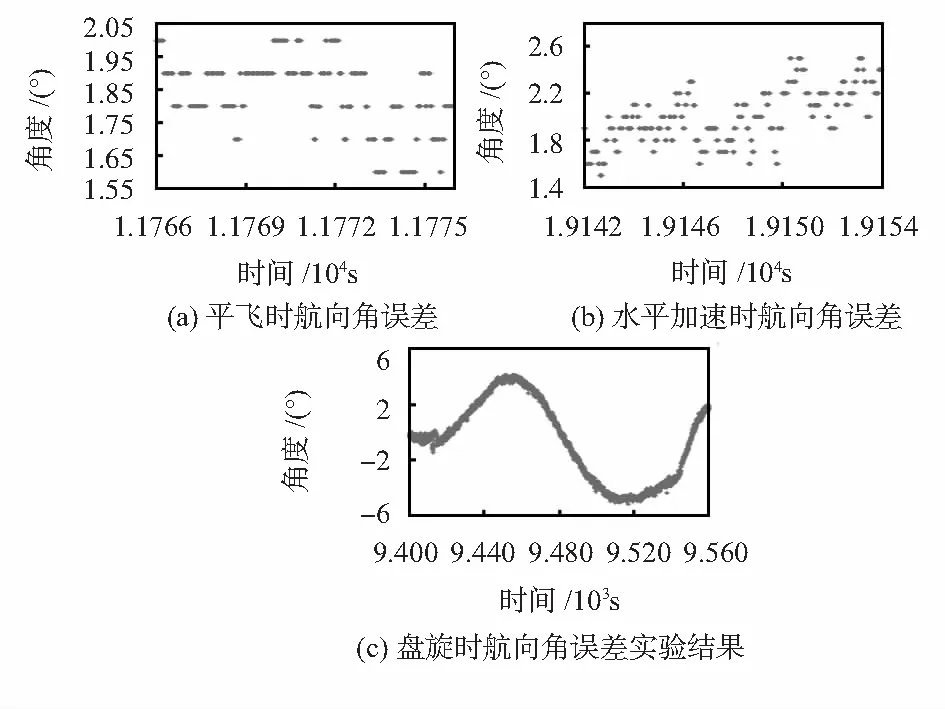
图2 飞行实验结果
6.3 仿真和实验结果分析
1)磁航向测量系统的航向角误差仿真结果和实验结果变化趋势基本一致。但是由于磁场分量测量误差和磁偏角的存在,两者存在常值偏差。
2)由图1(a)、图2(a)看出:在飞机平飞过程中,磁航向测量系统的航向角误差仿真结果和实验结果均为常值;由图1(b)、图2(b)看出:在飞机水平加速过程中,磁航向测量系统的航向角误差仿真结果和实验结果随时间呈增长趋势;由图1(c)、图2(c)、图3中可以看出:在飞机盘旋状态下,磁航向测量系统的航向误差仿真结果和实验结果,都呈周期性正弦变化;同时,在航向角为0°和180 °附近误差最大,而在航向角为90°和270°附近,误差最小。这是因为在飞机盘旋过程中,俯仰角误差较小,其航向角误差主要取决于倾斜角误差。验证了实际工程应用中“东西误差看俯仰,南北误差看倾斜”的经验语。
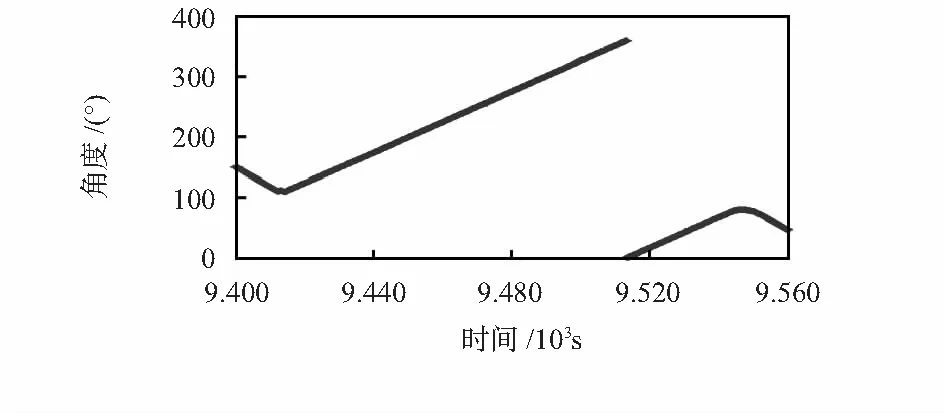
图3 盘旋时光纤组合惯导航向角变化图
7 结束语
本文着眼于无人机捷联式磁航向测量系统,在不考虑罗差影响的前提下,对其航向角误差的动态特性进行研究。通过对磁航向测量系统的航向角误差原理性推导,结合无人机特点,对其姿态测量设备框架式垂直陀螺仪的运动特性进行模型解析分析,并将姿态角误差源引入磁航向测量系统的航向角误差模型中,全面且综合分析该航向角在无人机不同动态条件下的误差特性,为工程应用中定性分析航向角误差提供理论基础,并为控制系统提高控制精度提供直接依据。同时在此基础上进行了误差仿真,并进行实验对比和验证。这对于航空工程应用中尤其是余度控制误差研究乃至保障控制系统任务作业精度有着重要的意义。
[1] 王勇军,李 智.三轴电子磁罗盘的设计与误差校正[J].传感器与微系统,2010,29(10):110-112.
[2] Race R,Schott C,Huber S.Electronic compass sensor[C]∥Proceeding of IEEE,2004:1446-1449.
[3] 陆建山,王昌明.数字磁罗盘的航向角干扰补偿方法研究[J].传感器与微系统,2010,29(6):75-76.
[4] Yang Y M,Wang Y N,Yuan X F.Bidirectional extreme learning machine for regression problem and its learning effective[J].IEEE Transaction on Neural Networks,2012,23(9):1498-1505.
[5] 李 艳,管 斌.电子磁罗盘航向误差推导及分析[J].仪器仪表学报,2013,34(7):1566-1571.
[6] 李丽锦,汤恒先.框架式垂直陀螺仪误差特性研究[J].传感器与微系统,2015,34(12):51-53.
Research on dynamic error characteristics of strapdown magnetic heading measurement system
LI Li-jin, ZHOU Zhi-guang, DUAN Yong
(No.365 Research Institute,Northwestern Polytechnical University,Xi’an 710072,China)
Error model of strapdown magnetic heading measurement system without considering magnetic deviation is built up,the dynamic error characteristics of magnetic heading under different flight condition for UAV is analyzed,combined with the attitude measurement characteristics of the frame type vertical gyro which is introduced into the error model.Error model is simulated,at the same time the simulation results and the experimental results are analyzed.The results show that the dynamic error character of the strapdown magnetic heading measurement system accords with the measurement error characteristics,and can provide theoretical basis for engineering application.
strapdown; magnetic heading; dynamical error; gyroscope; attitude error
10.13873/J.1000—9787(2017)05—0052—03
2016—05—20
TP 202
A
1000—9787(2017)05—0052—03
李丽锦(1982-),女,高级工程师,主要从事无人机机载测量设备技术的研究工作,E—mail:leeljin@sina.com。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
应用数学(2020年2期)2020-06-24
百科探秘·航空航天(2017年9期)2017-12-31
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
