反舰导弹攻击岛礁区编队舰船末制导雷达开机距离和角度研究*
2017-05-11 01:34侯学隆陈邓安
指挥控制与仿真 2017年2期
侯学隆,陈 榕,陈邓安
(海军航空工程学院,山东 烟台 264001)
反舰导弹攻击岛礁区编队舰船末制导雷达开机距离和角度研究*
侯学隆,陈 榕,陈邓安
(海军航空工程学院,山东 烟台 264001)
立足反舰导弹末制导雷达距离和角度分辨能力一定的情况,从战术上分析了识别岛礁区舰船编队某预定目标必要条件。从相对运动和相对位置关系出发,建立了导弹、目标舰船与非目标的位置关系模型,得到了末制导雷达“视域”内目标、非目标之间的距离差、角度差同导弹攻击方位、末制导雷达开机距离关系,并进行了仿真分析。结果表明,所建立的数学模型较好地解决了雷达制导反舰导弹岛礁区作战时攻击方位和末制导雷达开机距离的协同问题,为有关作战指挥提供了决策依据。
岛礁区编队舰船;攻击方位;末制导雷达开机距离;距离分辨力;角度分辨力
在海洋权益日益受到重视的背景下,反舰导弹打击争议岛礁区敌执行抵近巡逻、测量、输送等任务舰船的需求愈发迫切。由于岛礁区的近岸海域与陆岸相邻,陆岸复杂地物背景对雷达制导反舰导弹的目标识别影响很大[1]。现代海战中,舰艇通常以编队形式活动,编队中其它非目标舰船的干扰进一步增加了目标识别的难度[2]。
反舰导弹要准确选择岛礁区敌舰船编队中的某一目标,需要从方位和距离有效区分目标与非目标[3-4]。如何在反舰导弹末制导雷达距离、角度分辨力有限的条件下,采取合理的战术手段,确保目标与非目标(岛礁、非目标舰船)在方位和距离上的可分辨性,为反舰导弹末制导雷达识别预定目标创造条件,是现实而重要的问题。
反舰导弹正确识别岛礁区舰船编队某预定目标的方法有很多,但有效的战术手段有哪些;反舰导弹末制导雷达识别岛礁区舰船编队某预定目标的必要条件有哪些;导弹、目标、非目标的相对位置关系对战术使用有哪些制约。
针对以上问题,本文在分析反舰导弹末制导雷达识别岛礁区舰船编队某预定目标的必要条件基础上,分别建立了导弹攻击时,目标与岛礁、非目标舰船的距离差和角度差计算模型,并进行了案例仿真,以为上述问题的解决提供决策依据。
1 反舰导弹末制导雷达识别岛礁区舰船编队目标技术、战术分析
从技术上而言,提高反舰导弹末制导雷达识别岛礁区编队某一舰船能力的手段主要有:采用队形识别技术、采用相参或极化雷达提高导引头分辨力以及采用雷达成像技术等。
基于点集匹配理论的队形识别是一种较好的从多反射源中识别目标的技术[2,4]。采用全相参体制的导引头可获得极高的方位分辨率,而雷达极化技术可获取目标的极化信息,将其与高分辨力雷达技术结合起来,可有效提高对目标的识别能力[5-6]。成像雷达可获取更丰富的目标信息,为目标分类、识别等任务提供了更可靠的依据和支撑[7]。
从战术上提高末制导雷达对岛礁区某一舰船的识别能力的措施主要有合理选择攻击方向、末制导雷达开机距离[8-10]。攻击方向和自导距离可直接影响末制导雷达“视域”内目标舰船与岛礁(非目标舰船)的距离差和角度差,决定了末制导雷达能否有效分辨目标与非目标。
虽然从技术上和战术上均可提高反舰导弹末制导雷达识别岛礁区某一舰船的能力,但是相应的技术措施要求高,应用于实际装备是一个复杂的系统工程。而立足现有技术水平,研究采取合理的攻击方向和末制导雷达开机距离,对可靠截获岛礁区预定目标具有重要的现实意义。
2 反舰导弹末制导雷达识别岛礁区舰船编队目标必要条件
如前文所述,反舰导弹要准确选择岛礁区敌舰船编队中的某一目标,从方位和距离有效区分目标与非目标是十分必要的前提[3-4]。换言之,反舰导弹末制导雷达有效分辨目标舰船与非目标的必要条件为:目标舰船与非目标的距离差和角度差应分别大于末制导雷达的距离和角度分辨力。
图1 目标舰船与非目标的相对位置关系
假定导弹末制导雷达的距离分辨力和角度分辨力分别为Δd0和Δθ0,导弹的飞行方向指向目标初始位置,且由于态势所限,导弹只能从目标西面一侧攻击(下文同)。以正北方向为Y轴,正东方向为X轴建立坐标系。末制导雷达开机时,目标舰船与非目标(岛礁、非目标舰船)的相对位置关系如图1所示(为便于研究,在分析问题和建立模型时将岛礁和舰船看成质点)。
图1中,D点为末制导雷达开机时的导弹位置,T为该时刻目标舰船的位置,F为非目标位置,DT0为导弹飞行方向,目标舰船与非目标的距离差和角度差分别为ΔdF和ΔθF。其中ΔθF如图1所示,ΔdF=|DF-DT0|。
反舰导弹末制导雷达有效分辨目标舰船与非目标的必要条件的数学描述为如下约束条件:
ΔdF≥Δd0∩ΔθF≥Δθ0
(1)
3 目标舰船与岛礁角度差、距离差计算模型
由于敌预警机等信息系统支持,假定我方反舰导弹一发射敌舰即发现(下文同)。敌舰发现来袭导弹后,为最大限度利用岛礁背景干扰,迅速由初始位置T0向最近的岛礁I机动(下文同),导弹末制导雷达开机时,导弹、目标和岛礁I的位置关系如图2所示。

图2 导弹、目标和岛礁位置关系模型
图2中D、T0含义与图1同,T为末制导雷达开机时目标的位置。无论目标位置在何处,末制导雷达总是以导弹飞行方向为中心进行扇扫,因而产生了如图2所示目标与岛礁I的角度差Δθ。已知目标初始位置T0的坐标(xt0,yt0),岛礁I的坐标为(xi,yi),T0I=d0,导弹攻击航路距离为Dhl,航路飞行平均速度为Vhl,目标机动速度为Vt。末制导雷达开机前目标机动距离T0T=Dtjd,DT与Y轴的夹角为θ1;DI与Y轴的夹角为θ2。设末制导雷达开机距离DT0=Dld,导弹攻击方位角,即DT0与Y轴的夹角为θ。则导弹自控飞行距离
Dzk=Dhl-Dld
(2)
末制导雷达开机前目标机动距离
(3)
由图2可知
d0=((xt0-xi)2+(yt0-yi)2)1/2
(4)
D点的坐标为
(5)
末制导雷达开机时,目标位置T的坐标为
(6)
θ1、θ2分别为
(7)
(8)
由式(2)~(8)可得角度差Δθ
Δθ=|θ1-θ2|
(9)
由于
DI=((xi-xd)2+(yi-yd)2)1/2
(10)
DT=((xi-xt)2+(yi-yt)2)1/2
(11)
则由式(2)~(6)、(10)、(11)可得目标与岛礁I的距离差Δd
Δd=|DI-DT|
(12)
联立式(1)、(9)、(12),即可判断不同的导弹攻击方位、末制导雷达开机距离角条件下,目标舰船与岛礁I的距离差和角度差是否满足末制导雷达有效分辨目标与岛礁的条件。
4 目标舰船与非目标舰船角度差、距离差计算模型
对于反舰导弹而言,编队内其他非目标舰船同样也会干扰其对目标的识别。与岛礁的不同之处在于,非目标舰船具有机动能力,是能机动的“岛礁”。
发现来袭导弹之后,敌编队通常会转换队形(如防空队形)以抗击来袭的反舰导弹,这可能会改变反舰导弹末制导雷达开机时编队内舰船的相对位置关系[2]。
如图3所示,假定敌编队内某非目标舰船的初始位置J0的坐标为(xj0,yj0),发现来袭导弹后,该舰即以速度Vj向预定位置Jy(坐标为(xjy,yjy))机动,到达Jy后与目标舰船保持等速同向机动,末制导雷达开机时,该舰船位置J的坐标为(xj,yj),其他参数同上文。
图3 导弹、目标和非目标舰船位置关系模型
4.1 导弹末制导雷达开机时,非目标舰船正在向预定位置Jy机动(包含正好到达的情况)
令J0Jy=dj0,即
dj0=((xjy-xj0)2+(yjy-yj0)2)1/2
(13)

末制导雷达开机时,非目标舰船的位置J坐标(xj,yj)、α2分别为
(14)
(15)
由式(2)~(7)、(13)~(15)可得目标与非目标舰船的角度差Δα
Δα=|θ1-α2|
(16)
由于
DJ=((xj-xd)2+(yj-yd)2)1/2
(17)
则由式(2)~(6)、(11)、(13)、(14)、(17)可得目标与非目标舰船的距离差Δdj
Δdj=|DJ-DT|
(18)
4.2 导弹末制导雷达开机时,非目标舰船已超越预定位置Jy,正与目标保持等速同向机动
末制导雷达开机时,非目标舰船的位置J坐标(xj,yj)为
(19)
将式(19)代入式(15)可得α2,根据式(16)、(18)可得到此时目标与该非目标舰船的角度差Δα及距离差Δdj。
对于非目标舰船而言,联立式(1)、(16)、(18),即可判断不同的导弹攻击方位、末制导雷达开机距离条件下,目标舰船与非目标舰船的距离差和角度差是否满足末制导雷达有效分辨的条件。
5 仿真分析
假定目标舰船所在海区有4个岛礁、3艘敌舰船(1艘目标舰船和2艘非目标舰船),坐标如表1所示。导弹参数如下:导弹飞行航路距离Dhl=330km,航路飞行平均速度Vhl=310m/s,末制导雷达开机距离Dld=10km~40km,攻击方位角为0°~180°,末制导雷达距离分辨力Δd0=150m、角度分辨力Δθ0=4°,敌舰船机动速度为Vt=30kn。
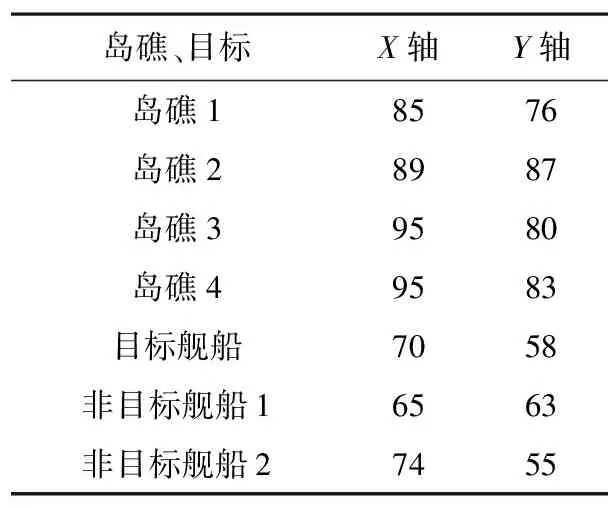
表1 目标舰船及非目标的坐标(km)
目标舰船与非目标的相对位置关系如图4所示,其中,岛礁分别为I1,I2,I3,I4,目标舰船、非目标舰船1、2的初始位置分别为T0,J01,J02,导弹末制导雷达开机时,目标舰船、非目标舰船1、2的位置分别为T,J1,J2。
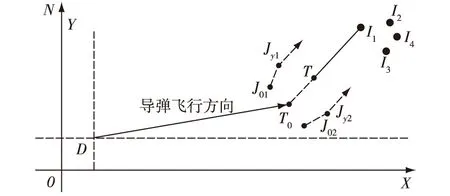
图4 目标舰船和非目标的相对位置关系
由表1可知,目标舰船与岛礁1的距离最近,且其航向指向岛礁1。经计算目标舰船机动过程中,与其他岛礁的距离都满足导弹末制导雷达距离分辨力的要求(即使目标机动至岛礁1的位置,其与岛礁2、3、4的距离差依然满足要求)。因此,为满足距离和方位分辨要求,影响导弹末制导雷达开机距离和攻击方位的因素主要为:目标舰船与岛礁1相对导弹自控终点的距离差和角度差,目标舰船与非目标舰船1、非目标舰船2相对导弹自控终点的距离差和角度差,目标舰船与其他岛礁相对导弹自控终点的角度差。
目标舰船与岛礁1、非目标舰船1、非目标舰船2的距离差对导弹攻击方位、末制导雷达开机距离的约束如图5所示。
由图5可知,当导弹攻击方位角为172.7°~180°时,其末制导雷达的开机距离在性能参数范围内应不超过图中曲线,否则无法从距离上有效分辨目标与非目标。
目标舰船与4个岛礁、2艘非目标舰船的角度差同导弹攻击方位、末制导雷达开机距离的关系如图6所示。

图5 距离差对导弹攻击方位、末制导雷达开机距离约束

图6 角度差对导弹攻击方位、末制导雷达开机距离约束
由图6可知,当导弹攻击方位角为0~83.6°和112.7°~180°时,其末制导雷达的开机距离在性能参数范围内应不超过图中曲线的最小值,否则无法从方位上有效分辨目标与非目标。
由式(1)、图5、图6可知,目标舰船与非目标的距离差、角度差对导弹攻击方位、末制导雷达开机距离的约束如图7所示。
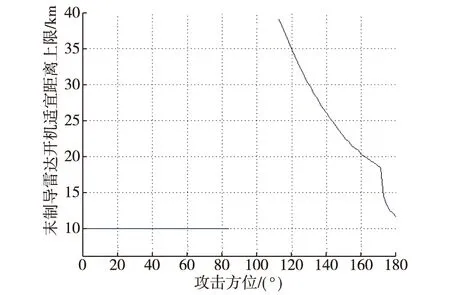
图7 导弹攻击方位、末制导雷达开机距离约束关系
由图5、图6可知,对于某一攻击方向,目标舰船与相关岛礁、非目标舰船的距离差和角度差对末制导雷达开机距离可能有不同的约束,而导弹末制导雷达要正确选择预定目标,需同时满足距离差和角度差的约束。如图7所示,当导弹攻击方位角为0~83.6°和112.7°~180°时,末制导雷达的开机距离在性能参数范围内不宜超过图7所示的曲线,否则无法识别目标。
6 结束语
雷达制导反舰导弹岛礁区作战面临岛礁背景和编队非目标舰船干扰的双重不利因素影响。
1)岛礁的位置分布,目标的初始位置、机动情况,编队内非目标舰船的初始位置、机动情况,反舰导弹的攻击方位和末制导雷达开机距离直接影响末制导雷达“视域”内的目标与非目标(岛礁、非目标舰船)距离差和角度差,进而影响末制导雷达对目标的识别。
2)对于某一攻击方向而言,目标舰船与相关岛礁、非目标舰船的距离差和角度差对末制导雷达开机距离的约束可能不同。
3)雷达制导反舰导弹岛礁区作战时,攻击方位、末制导雷达开机距离之间的协调配合非常重要。即应根据不同的攻击方位,在性能参数范围内合理确定反舰导弹末制导雷达的开机距离,以保证雷达“视域”内的目标与非目标的距离差和角度差同时满足分辨力要求。
由此可见,本文建立的数学模型较好地解决了雷达制导反舰导弹攻击岛礁区舰船编队某目标时的攻击方位和末制导雷达开机距离的协调配合问题,为雷达制导反舰导弹岛礁区作战指挥提供了决策依据。
[1] 司记伟, 田燕妮, 潘莉莉. 雷达制导反舰导弹打击近岸目标研究[J]. 飞航导弹, 2015(8): 47-51.
[2] 卢毅, 姜永华, 翟龙军, 等. 空舰导弹获取舰艇编队形状能力研究[J]. 航空学报, 2011, 32(1):145-155.
[3] 卢毅, 姜永华. 反舰导弹对目标选择的一种新方法[J]. 航空学报, 2010, 31(4): 778-784.
[4] 毕开波, 董受全, 张翼飞. 队形识别技术对反舰导弹作战使用的影响分析[J]. 飞航导弹, 2015(12): 25-29.
[5] 姜永华, 但波, 李敬军, 等. 基于目标特征信息的反舰导弹目标选择技术发展历程[J]. 飞航导弹, 2013(7): 77-82.
[6] 王雪松, 雷达极化技术研究现状与展望[J]. 雷达学报, 2016, 5(2): 119-131.
[7] 李少东, 杨军, 陈文峰, 等. 基于压缩感知理论的雷达成像技术与应用研究进展[J]. 电子与信息学报, 2016, 38(2): 495-508.
[8] 王建国, 沙卫晓, 刘涛, 等. 反舰导弹攻击近岸目标问题研究[J]. 弹箭与制导学报, 2010,30(2): 71-72.
[9] 刘亿, 孙洲. 反舰导弹末制导雷达最佳开机点的确定方法[J]. 战术导弹技术, 2015(4): 82-85.
[10]陈榕, 韩华, 陈邓安. 雷达与红外制导反舰导弹协同攻击岛礁区目标[J]. 火力与指挥控制, 2015, 40(12): 64-66.
Research on Distance and Angle to Turn on Terminal Guidance Radar of ASM Attacking Ship of Formation in Coral Islands or Reefs Area
HOU Xue-long, CHEN Rong, CHEN Deng-an
(Navy Aeronautical Engineering Institute, Yantai 264001, China)
The tactical necessary condition of identifying certain ship of Formation in Coral Islands or Reefs Area is analyzed, based on the distance & angle resolution of anti-ship missile (ASM) terminal guidance radar (TGR) are limited. According to their relative movements and locations, the location relationship model of missile, target ship and non-target ship are established. And the relationship of distance difference, angle difference between target and non-targets in terminal guidance radar ‘field of view’ and attack orientation of missile and distance to turn on terminal guidance radar is found out. The corresponding simulation is carried out. And it shows that the mathematic model established here can achieve the purpose of setting attack orientation of missile and distance to turn on terminal guidance radar coordinately while radar guided ASM used in in Coral Islands or Reefs Area. So decision basis for operation command is put forward.
ship of formation in coral islands or reefs area; attack angle; distance to turn on terminal guidance radar; distance resolution; angle resolution
2016-12-04
2016-12-15
国家社科基金(14GJ003-154)
侯学隆(1979-),男,江西樟树人,博士研究生,讲师,主要从事战术导弹作战使用、海军作战建模与仿真研究。 陈 榕(1984-),男,博士,讲师。 陈邓安(1977-),男,副教授。
1673-3819(2017)02-0076-05
TJ761.1;E917
A
10.3969/j.issn.1673-3819.2017.02.015
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
数字海洋与水下攻防(2020年5期)2021-01-04
中国新技术新产品(2020年19期)2020-12-25
军事运筹与系统工程(2019年4期)2019-09-11
航天电子对抗(2019年4期)2019-06-02
军事运筹与系统工程(2018年1期)2018-11-10
通信产业报(2018年24期)2018-09-21
兵器知识(2017年10期)2017-10-19
太空探索(2014年1期)2014-07-10