智能交通灯控制系统的研究与设计
2017-05-13 08:51唐惠王磊邵晓根孔亮姜英姿
科技与创新 2017年7期
唐惠+王磊+邵晓根+孔亮+姜英姿

摘 要:主要研究交叉口的信号配时优化问题,将延误时间、停车率和通行能力3个优化目标消除量纲,建立单目标的模糊规划模型,运用遗传算法求解单交叉口信号灯的最佳配时方案。在此基础上,引入绿波协调控制模型优化相邻交叉口的配时方案,运用VISSIM软件检验优化结果。仿真结果与理论值贴合度极大,该方案能有效分配相邻交叉口的绿灯时间。
关键词:模糊控制;绿波协调控制;遗传算法;VISSIM仿真
中图分类号:O221 文献标识码:A DOI:10.15913/j.cnki.kjycx.2017.07.020
随着国民经济的快速发展和人们生活水平的普遍提高,城市道路交通日渐拥堵,极易诱发安全、土地、资源等一系列问题。高效的交通灯智能控制系统是解决城市交通问题的关键。传统的单交叉口交通信号控制一般采用定时控制方案,这种方案时常会因为放行不合理导致交通阻塞。因而,研制一套根据车流量自动控制交通灯时长的智能交通控制系统是很有意义的。由模糊控制系统实现的单交叉口交通的通行率比目前的定时与感应控制方案要有效得多,区域协调控制时,在不同的交通流量下,模糊控制方式比定时与感应控制方式相比,都很少有车辆等待,更大限度地缩短了车辆平均延误时间,最终实现环保节能经济通行的目标。本文基于模糊控制法优化交叉口信号配时,以提高交叉口的运行效率。
1 模型的建立
1.1 相位定义
本文交通信号配时采用四相设计。通过查阅资料可知,四相位是:第一相位指东西直行右转混合车道,第二相位指东西左转车道,第三相位指南北右转混合车道,第四相位指南北左转车道。
1.2 主要参数
交叉口信号灯的运行效率主要用以下4个基本参数衡量,即通过能力、饱和度、车辆受阻延误时间和停车率。
1.2.1 通过能力
绿信比ui、饱和流量S、相位允许通行能力Q的关系式為:
式(1)(2)(3)中:gi为第i相位的有效绿灯时间;C为信号周期;W为车道宽度。
1.2.2 相位饱和度
相位流量比、饱和度的计算公式是:
式(4)(5)中:y为相位流量比;x为相位饱和度;q为车流到达率。
1.2.3 车辆受阻延误时间
车辆受阻延误时间为:
式(6)(7)(8)中:d为车辆总延误;du为正常相位延误;d0为随机以及过饱和延误。
其中:
车辆受阻延误时间为:
1.2.4 停车率h
停车率的计算公式是:
式(12)(13)(14)中:f为完全停车的修正系数;hu为正常阻滞停车率;h0为随机和过饱和停车率。
1.3 单交叉口信号配时模型
运用模糊控制模型对延误X1、停车次数X2和通行能力X3三者进行无量纲处理,确定各目标的权重系数,将问题转化为单目标规划进行求解。设交叉口有n相位,在一个周期内的延误时间、停车次数、通行能力的相反数可分别表示为:
周期取值根据国标约束小于某上限值,饱和度的取值不能过大也不可过小。采用模糊控制模型,将点控模型转化为多变量的单目标规划,即:
1.4 相邻两交叉口协调配时优化模型
绿波指车沿某条线路行驶遇到连续绿灯放行信号,无阻通过各交叉口。
1.4.1 单向交通街道
相邻交叉口间的时差为:
式(20)中:λ为相邻信号间的时差;s为相邻信号间的间距;v为线控系统车辆连续通行的车速。
1.4.2 双向交通街道
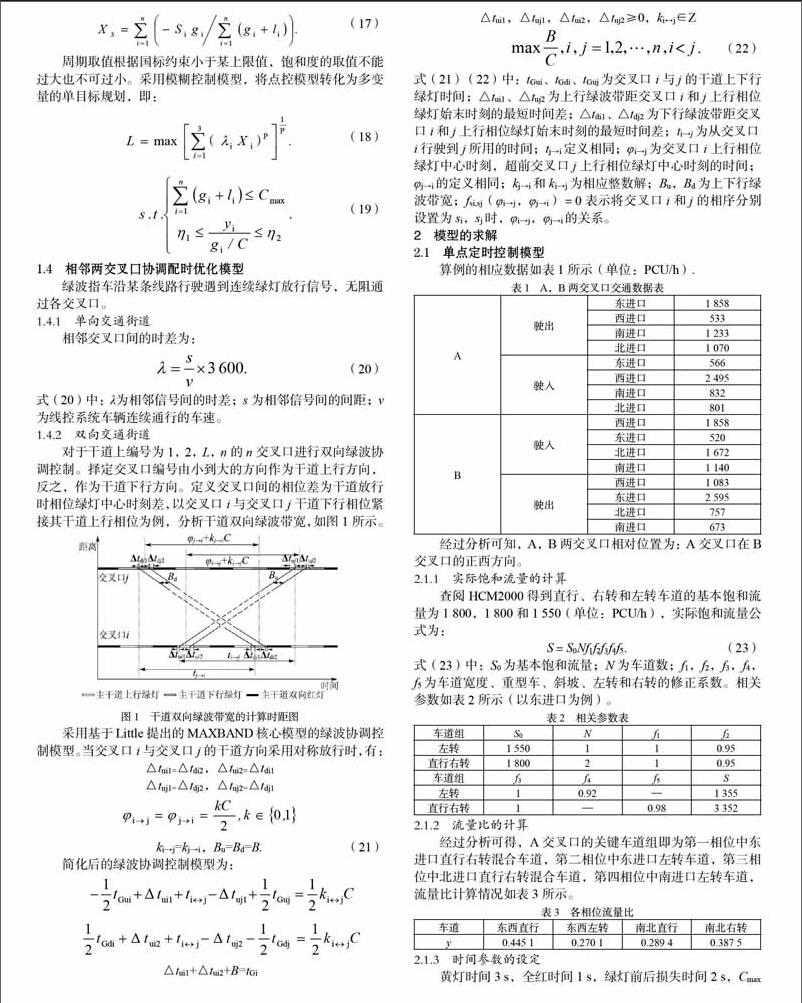
对于干道上编号为1,2,L,n的n交叉口进行双向绿波协调控制。择定交叉口编号由小到大的方向作为干道上行方向,反之,作为干道下行方向。定义交叉口间的相位差为干道放行时相位绿灯中心时刻差,以交叉口i与交叉口j干道下行相位紧接其干道上行相位为例, 分析干道双向绿波带宽,如图1所示。
采用基于Little提出的MAXBAND核心模型的绿波协调控制模型。当交叉口i与交叉口j的干道方向采用对称放行时,有:
简化后的绿波协调控制模型为:
式(21)(22)中:tGui、tGdi、tGuj为交叉口i与j的干道上下行绿灯时间;△tui1、△tuj2为上行绿波带距交叉口i和j上行相位绿灯始末时刻的最短时间差;△tdi1、△tdj2为下行绿波带距交叉口i和j上行相位绿灯始末时刻的最短时间差;ti→j为从交叉口i行驶到j所用的时间;tj→i定义相同;φi→j为交叉口i上行相位绿灯中心时刻,超前交叉口j上行相位绿灯中心时刻的时间;φj→i的定义相同;kj→i和ki→j为相应整数解;Bu,Bd为上下行绿波带宽;fsi,sj(φi→j,φj→i)=0表示将交叉口i和j的相序分别设置为si,sj时,φi→j,φj→i的关系。
2 模型的求解
2.1 单点定时控制模型
算例的相应数据如表1所示(单位:PCU/h).
经过分析可知,A,B两交叉口相对位置为:A交叉口在B交叉口的正西方向。
2.1.1 实际饱和流量的计算
查阅HCM2000得到直行、右转和左转车道的基本饱和流量为1 800,1 800和1 550(单位:PCU/h),实际饱和流量公式为:
式(23)中:S0为基本饱和流量;N为车道数;f1,f2,f3,f4,f5为车道宽度、重型车、斜坡、左转和右转的修正系数。相关参数如表2所示(以东进口为例)。
2.1.2 流量比的计算
经过分析可得,A交叉口的关键车道组即为第一相位中东进口直行右转混合车道,第二相位中东进口左转车道,第三相位中北进口直行右转混合车道,第四相位中南进口左转车道,流量比计算情况如表3所示。
2.1.3 时间参数的设定
黄灯时间3 s,全红时间1 s,绿灯前后损失时间2 s,Cmax=180 s,饱和度x∈(0.7,0.9)。
2.1.4 各目标函数的量纲消除
以A交叉口交通流量为例,其隶属度函数为:
2.1.5 模糊偏好法权重的确定
将权重进行归一化得到:
因此,目标规划即转化为:
对应的约束条件是:
2.1.6 具体求解结果以及对P值的讨论
以A交叉口为例,将此目标规划在P取不同值的情况下进行优化,优化情况如表4所示。
由表4可知,当P=1时,优化效果最明显。根据P=1作出单交叉口有效绿灯时间的最优分配图,如图2所示。
基于多变量目标规划模型,可以解出单交叉口有效绿灯时间的最优分配情况。
2.2 相邻交叉口协调配时优化模型
根据文章所述内容,得出A,B交叉口有效绿灯分配方案如表5所示。
2个相邻交叉口之间的绿波信号协调是比较简单的,采用图解法求解即可,如图3所示。
图3中绘制的平行斜线所标定的时间范围称为带宽,它确定干道上交通流所用的通车时间;平行斜线的斜率就是车辆沿干道可连续通行的带速。
根据图3可以确定关键交叉口为B,然后修正交叉口A的时间,使其总时间为132 s。由此可以明显看出,A交叉口不能满足B交叉口所通过的车流,所以,将A交叉口第一相位的时间调整为45 s。剩余三相位分别为21 s、34 s和24 s,按照2∶3∶3分配给个相位。调整后相位时间如表6所示。
这种方法仅针对单向B至A的行驶情况,本文不讨论双向绿波通道。
3 仿真模拟
基于单交叉口进行双交叉口的绿波修正,通过VISSIM软件进行双交叉口的仿真模拟,其运行一段时间后未出现堵塞,仍然较为稳定。仿真情况如图4所示。
运行一段时间后,比较理论结果与仿真结果,如7所示。
理论结果与仿真贴合度极大,所以说,该方案对相邻交叉口的有效绿灯时间优化分配比较稳定。
参考文献
[1]卢凯,郑淑鉴,徐建闽,等.面向双向不同带宽需求的绿波协调控制优化模型[J].交通运输工程学报,2011(05):101-108,126.
[2]王灿,何淳,吴亚龙,等.智能交通灯控制系统的设计和仿真[J].重庆工商大学学报(自然科学版),2009(01):84-87,92.
[3]李洪中.基于模糊控制的智能交通灯系统的研究与设计[D].兰州:兰州交通大学,2013.
[4]关朴芳,陈成春,许铁.交通信号控制中的延误计算与分析[J].福建电脑,2007(09):81,96.
[5]刘权富,陆百川,马庆禄,等.平面交叉口信号控制多目标优化研究[J].交通科技与经济,2014(01):47-50.
[6]孟博翔.基于绿波带的城市主干道交通优化研究[D].兰州:兰州交通大学,2014.
[7]卢凯,徐建闽,陈思溢,等.通用干道双向绿波协调控制模型及其优化求解[J].控制理论与应用,2011(04):551-555.
[8]LITTLE J D C,KELSON M D,GARTNER N H.MAX-BAND:a versatile program for setting signals on arteries and triangular networks.Cambridge:Massachusetts Institute of Technology,1981.
〔編辑:白洁〕
猜你喜欢
河南科技(2022年8期)2022-05-31
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
大陆桥视野·下(2017年12期)2017-11-29
科学家(2016年13期)2017-09-29
神州·中旬刊(2017年1期)2017-06-28