
基于航海信息的航海任务智能识别方法
2017-05-16 08:00张杰冯纪军岳兴旺
船海工程 2017年2期
张杰,冯纪军,岳兴旺
(大连海事大学 航海学院,辽宁 大连 116026)
基于航海信息的航海任务智能识别方法
张杰,冯纪军,岳兴旺
(大连海事大学 航海学院,辽宁 大连 116026)
为减轻航海人员面向不同的航海任务时需及时获取有效航海信息的工作负担,分析典型航海任务特征,基于ECIDS等船端航海仪器和导航系统提供的数据,分析处理基本的船舶动态和静态信息,得出可智能识别航海任务的方法。
航海信息;航海任务;智能识别;电子航海图
随着船岸通信技术和岸基信息服务支持技术发展,尤其是e-navigation战略的实施,航海人员能够获取的航海信息的种类越来越多,结构也越来越复杂,除了船端航海仪器提供的信息之外,为了制定安全经济的航行决策,船上人员还必须同时考虑岸基海事管理部门、港口部门和气象部门等提供的丰富岸基支持信息。所有上述信息需经过航海人员接受、判断、分析、决策后,才能成为实际的操船方案[1]。统计表明,海上交通事故的发生80%以上是人为因素造成的。因此,船上需要一个高效统一的智能处理平台,代替(或部分代替)航海人员完成这项工作,以减小人为因素造成海难事故发生的可能性,并且减少船员定额。下一代电子海图显示与信息系统(ECDIS)将成为船舶驾驶台的“信息中心”,是实现该项工作的最佳载体。因此,航海信息的综合处理与显示功能成为船舶导航系统发展的必然要求。为确保面向不同的航海任务,在平台上智能显示出船舶所需有效航海信息,智能识别船舶状态的技术是研究的重点。为此,基于基础的航海信息探讨智能识别船舶状态(航海任务)。
1 智能识别航海任务的方法
1.1 典型的航海任务
为执行航次计划,海上营运船舶在整个航次中需要执行不同种类的航海任务。通过对8 000多条不同类型不同吨位的商用船舶统计分析,通常船舶执行的典型航海任务包括在港系泊、靠离泊作业、锚泊(锚地锚泊和遮蔽水域锚泊)、进出港航行、狭窄水道航行、运河航行、近岸航行、沿海航行和大洋航行等。
固然AIS可提供船舶当前的航行状态,但是其提供的航行状态信息有2个弊端:一方面,一般AIS船载设备中航行状态选项较少,分类不细致,比如“under way using engine”航行状态包括所有的“主机在航”的航行任务,其分类与船舶通常执行的典型航海任务不能完全的匹配;另一方面,在整个航次过程中,虽然驾驶员对每一次航行状态的改变都清晰明了,却经常延迟甚至忽略对AIS状态的更改。因此,有必要寻求一种可靠的船舶状态(航海任务)识别方法[2]。
1.2 电子航海图(ENC)
ENC数据是以单元作为计量单位的。所谓的单元是指某地理区域的ENC数据分发的基本单位,地理区域为由经线和纬线组成的方形区域。每个ENC单元的数据都要单独存储,而且有惟一的单元名(文件名)。在S-57中,ENC的数据文件名称由8位字符编码给出,其中第3位表示航海用途[3]。表1为ENC数据航海用途编码表。
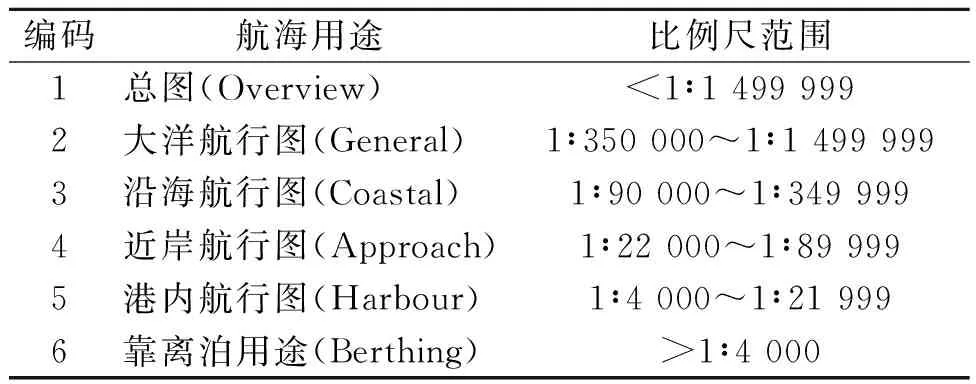
表1 ENC数据航海用途编码表
1.3 航海任务智能识别研究思路
航海任务智能识别研究思路见图1。
1)开启ECDIS海图自动载入模式,ECDIS将根据搜图原则,在SENC中查找符合当前显示比例尺且能够覆盖当前位置电子屏幕的海图,并把覆盖屏幕中心的图作为显示的当前图,且自动用其他图的数据填充未被当前图填充的区域。
2)基于GPS船位,在监控模式下识别当前船位下ECDIS载入的海图,获取最大比例尺海图的文件名。根据文件名第3位判断航海用途。
3)根据海图的航海用途,可以初步判断船舶当前可能正在执行的航海任务。根据WENDWG 2016年5月统计,目前约有5 800个ENC 单元。通过与往年统计数据对比分析,ENC 单元逐步增多,在目前可通航水域,大、中、小各种比例尺ENC单元覆盖率较高,接近于全覆盖。因此,可以基于最大比例尺海图的航海用途,初判船舶可能执行的航海任务。
同时考虑到不同比例尺ENC单元在部分地理区域存在数据重叠或者某一地理区域缺失大比例尺海图,因此,根据获取到的最大比例尺海图的航海用途判断航海任务时,应适当扩大可能执行的航海任务的范围。
4)综合其他岸基支持信息和船舶航海信息,进一步判断船舶当前执行的航海任务[4]。
2 智能识别航海任务的关键技术
2.1 航海任务的关键特征
航海任务的关键特征是二次判断航海任务的首要依据,对确定优先考虑和分析的航海任务至关重要。同时,这些关键特征也有助于最后分析判断结论,决定了确定的航海任务的可靠性。
各种航海任务在航行图中的关键特征为[5]。
1)在港系泊。船位是计划航线的始点或终点,船速为0,周边可搜索到“berth”地理物标。
2)靠离泊作业。船速不超过3 kn,周边可搜索到“dock area”和“fairway”地理物标,船舶在港池区内、航道外;比较累计航程和剩余航程的大小,可判断出靠泊或离泊作业。
3)进出港航行。航速超过3 kn,周边可搜索到“fairway”地理物标,且船舶在航道内;比较累计航程和剩余航程,判断出进港或出港航行。
4)进出锚地航行。船速不为0,搜索周边“anchorage area”和“fairway”地理物标,船舶不在航道内,若判断出船舶在锚地内,船速低于3 kn,则为船舶准备抛锚或已经起锚;若判断出船舶在锚地外,则提取周边船舶AIS航行状态,判断“at anchor”和“moored” 状态的船舶与本船的平均距离,若与“at anchor”的多艘船舶平均距离较小,则船舶为进出锚地航行,否则为靠离泊作业[6]。
5)锚泊。船速为0,周边可搜索到“anchorage area”地理物标,判断船舶在锚地内即为锚泊,否则提取周边船舶AIS航行状态,判断“at anchor”和“moored” 状态的多艘船舶与本船的平均距离,若与“at anchor”的多艘船舶的平均距离较小,则船舶为锚泊,否则为系泊状态。
6)运河航行。船速不为0,搜索周边“canal”地理物标,若判断出船舶在运河内,即为运河航行;否则,搜索由“coast line”围成的狭水道(2 n mile),若判断出船舶在狭水道内,即为狭水道航行,否则,即为近岸航行。
2.2 判断航海任务的关键技术
1)自动获取当前船位下的最大比例尺ENC单元文件名。IHO S-52要求,在监控模式下,海图显示的基本原则是选择本船位置处最大比例尺的海图进行显示。因此,在航行监控过程中,可以获取最大比例尺ENC单元文件名。
2)根据二次判断后的船舶航海任务特征,搜索本船周围一定范围内的地理特征物标。S-57物标的数据模型通过空间对象和特征对象的组合来描述现实世界的物标实体。空间对象是描述实体的空间位置属性,由点、边界和面的坐标及其相互关系构成。特征对象是描述实体的种类、性质和特征等属性信息。S-57物标数据模型定义了160种地理物标,包括判断航海任务所需的锚泊区、泊位、运河、航道、港池区等。因此,基于地理物标的特征,可以搜索到本船周围一定范围内的地理物标[7]。
3)判断本船与特征物标的位置关系。对于某些航海任务,需要判断本船与特征物标的位置关系,如进出港航行需判断船舶是否在航道内,锚泊需要判断船舶是否在锚泊区内等。此类特征物标的空间对象通常都可以作为面。因此,简化为判断点与区域(简单多边形)的位置关系,目前有很多算法可以快速地解决此类问题[8]。
某船进港靠泊过程实例推演见图2、3。
3 结论
1)该航海任务智能识别方法得到了大量实船推演验证,推演结果与船舶当时的实际航海任务基本相符,识别方法具有一定的实用性。
2)当前ECDIS具备集成和显示部分航海信息的功能,本方法侧重于ECDIS的智能化功能。
3)识别方法中的关键技术问题必须在电子海图的基础上才可以解决。
4)识别方法可用于配备ECDIS且能提供基本航海信息的船舶,无需人工介入,可减少人员参与产生的航海决策失误。
5)在此基础之上,应进一步研究不同航海任务下航海信息的综合处理与显示,为驾驶员动态、高效地提供所需航海信息。
[1] 郑佳春,张杏谷,邵哲平.基于模糊神经网络的航海信息融合技术研究[J].中国航海,2003(4):19-22.
[2] 刘志刚.船舶自动识别系统在船舶交通管理系统中的应用[J].船海工程,2007(2):123-125.
[3] 张吉平.电子海图显示与信息系统[M].大连:大连海事大学出版社,2014.
[4] 岳林,项国,胡伟浩.面向任务的舰船系统信息流程仿真优化方法[J].中国舰船研究,2015,10(6):114-119.
[5] 张英俊.电子海图的数学和算法基础[J].大连:大连海事大学出版社,2001:76-135.
[6] 向俊,王静,夏幼明.判断点与多边形拓扑关系的改进算法[J].计算机工程与设计,2014(5):1 732-1 737.
[7] IHO S-57,关于数字化海道测量数据的传输标准[S].北京:国际海道测量局出版,2000.
[8] 李楠,肖克炎.一种改进的点在多边形内外判断算法[J].计算机工程,2012(5):30-34.
Research on Intelligent Recognition of Navigation Tasks Based on Navigation Information
ZHANG Jie, FENG Ji-jun, YUE Xing-wang
(Navigation College, Dalian Maritime University, Dalian Liaoning 116026, China)
In order to alleviate the burden of obtaining effective information in time for different tasks, the characteristics of classic navigation tasks were analyzed. According to the data provided by navigational instruments aboard, a method was proposed to recognize navigation tasks intelligently and process the fundamental dynamic and static information.
navigation information; navigation tasks; intelligent recognition; ENC
10.3963/j.issn.1671-7953.2017.02.043
2016-09-01
国家自然科学基金(51679025)
张杰(1985—),男,博士,讲师
U691
A
1671-7953(2017)02-0185-03
修回日期:2016-09-18
研究方向:船舶智能化
猜你喜欢
凤凰动漫(军事大王)(2022年5期)2022-08-22
安徽建筑(2021年5期)2021-05-27
故事作文·高年级(2020年9期)2020-09-16
航海(2020年4期)2020-08-17
中国测试(2019年10期)2019-11-16
少林与太极(2018年9期)2018-09-28
舰船科学技术(2018年8期)2018-09-02
作文大王·低年级(2017年10期)2017-10-28
科技创新导报(2017年22期)2017-10-26
航海(2017年3期)2017-06-09
