
基于机器鱼的内陆湖泊水质在线监测系统设计
2017-05-24 14:45童晓红
计算机测量与控制 2017年5期
童晓红,陈 玲,华 艳,杨 磊
(1.合肥职业技术学院 信息中心,合肥 238000;2.安徽斯玛特物联网科技有限公司,合肥 231000)
基于机器鱼的内陆湖泊水质在线监测系统设计
童晓红1,陈 玲1,华 艳1,杨 磊2
(1.合肥职业技术学院 信息中心,合肥 238000;2.安徽斯玛特物联网科技有限公司,合肥 231000)
仅依赖无线传感器网络在线实测是利用多跳式通信实现远程发送与存储数据丢包率高,实验阶段设计的二维结构仿真机器鱼巡游避障性能差,GPRS全天候数据采集与传送所需的流量费用高,针对以上这些问题,设计了一套可进行实测的机器鱼自动巡游避障、水质环境实时监测系统平台;该系统通过移动终端程序设计、利用三维采集路径跟踪算法及WSNs与Wifi热点技术对机器鱼群实现远程精准控制,按照设定深度、路径规划的采集点进行水温水位、PH值、溶解氧、电导率、浊度等常五类水质环境数据实时采集、处理、远程存储、显示、分析及预警,给出了系统的总体设计、机器鱼的结构与控制系统设计、终端节点与协调器的硬件系统及上下位机软件系统设计;利用这套系统对巢湖5个取样点实测,水温、溶解氧、PH值平均误差率分别为0.18%、0.5%及0.01%,远高于其他水质在线监测的精度要求,达到了预期成果;同时对水库及精细水产养殖业等水质在线监测与预警具有很高的推广价值。
WSNs;WiFi;机器鱼;内陆湖泊;水质在线监测;系统设计
0 引言
内陆湖泊一般位于人口与产业聚集区,是区内珍贵的水源地,资源短缺。因此对水质进行监测特别是实时监测显得非常重要,一旦出现突发性问题需及时报警并采取相应措施。传统的基于国家级的基站多参数水质检测仪无法实现全天候实时监测,过去的485现场总线模式不适合移动多点监测。王士明等人研究设计的基于ZigBee的大水域水质环境监测系统仅依靠ZigBee网络进行远程多跳式通信,数据发送与存储丢包率高[1],且构建大范围无线传感器网络的算法复杂,节点布局难;付焕森等人研究设计的基于ZigBee和GPRS的仿真机器鱼水质监测系统设计[2]虽然引入机器鱼巡游系统,但二维结构设计的机器鱼巡游避障性能差,利用GPRS模块对数据收集、传输、存储其稳定性不够、全天候数据采集与传送所需的流量费用也非常昂贵。
本文综合上述思路,研发设计的机器鱼能按照规划的三维采集路径算法实现精准的巡游避障;携带多种传感器舱体及浮标球气泵设计使机器鱼用途更广、维护更便利;机器鱼嵌入的网关节点的WiFi模块,利用智慧城市免费的wifi热点连接把基于WSNs集成的多传感器各节点数据及时稳定地发送到远程数据库服务器,通过设计的平台就可以实现对水质实时数据监测、分析与预警。利用该系统对巢湖选定的具有代表性的污染源入口多次实测,并通过与精密水质分析仪现场测定数据比对、算法校正,基本实现了预定的水质在线监测目标。这套系统实施成本低,可操作性便利,目前与企业合作,除内陆湖泊外,在大范围的饮用型水库、精细水产养殖业等水质监测得到广泛的推广应用。
1 系统总体设计
系统的网络结构的设计包括监测中心、通信基站、网关、传感器节点等。其分层结构是由物理链路感知层、网络数据传输层、数据分析处理应用层组成[3],如图1所示。物理链路感知层主要由机器鱼载体及其内嵌的常五类传感器、RS232-485模块、数据采集器组成;网络数据传输层是由协调器及网关节点、Wifi通信模块、无线路由等组成,对传感器采集的数据以加密包的形式向上位机进行数据分割、传送,并通过Web Service接口,利用网关节点的负载均衡与存储管理实时存放到对应的数据表内;数据分析处理应用层是利用算法、.NET框架设计出Web系统平台供远程用户登录、实现查询、控制及预警;移动终端(手机)移植并安装机器鱼控制系统可实现对机器鱼节点定位巡游,同时也可以利用手机的APP系统对水质实时查询。在数据传输方法上规避了总线传输受限固定节点、GPRS实时远程传送带宽低、丢包率高、全天候费用昂贵等缺陷,让机器鱼节点间采用WSNs技术组网,网关协调器增加WiFi模块,加上近年来免费的Wifi热点覆盖率及带宽呈几何级数递增、无缝漫游技术日趋成熟为机器鱼远程巡游、多点采集与数据实时传输提供了保障,基于wifi模块与热点技术是本系统在设计上区别于国内外其他系统的一个显著特点。
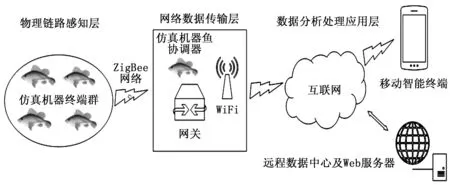
图1 系统结构图
2 机器鱼的结构与控制系统设计
2.1 机器鱼结构设计
近年来,国内外许多研究机构和高等院校对机器鱼进行了大量的研究,并且在各个领域中得到了实际运用。英国埃塞克斯大学的研究人员向泰晤士河投放专门设计的机器鱼,用于探测水中的污染物,并绘制河水的3D污染图;日本三菱重工也已经将研究的机器鱼玩具批量生产;中国北京航空航天大学和中国科学院研制的SPC-II机器鱼也成功地用于水下考古探测。目前国内外研究机构研制的机器鱼的结构不尽相同,但基本都是通过模仿和控制鱼鳍的运动来达到运动目的[4],到达设定目标完成设定任务后返航或巡游进入下一个测量点。考虑到湖泊水体水质采集点对机器鱼适用性及控制性的要求,在机器鱼的设计上结合国内外机器鱼的特点,设计出适应于内陆湖泊水质监测的机器鱼结构模型。如图2所示。
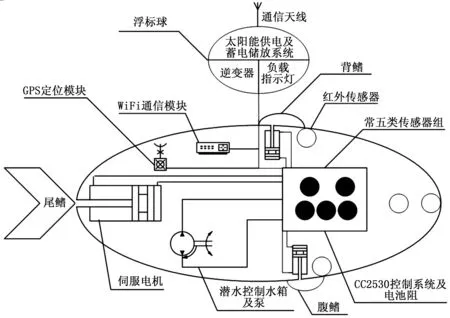
图2 机器鱼结构
其内部结构可分解为视频模块、导航模块、任务调度模块、运动控制模块、通信模块、电源模块和鳍部运动模块等。视频模块设计放在头部,主要对水下环境进行摄像处理;导航模块可利用GPS定位及数字地图规划路径,配合伺服电机驱动螺旋桨、及运动控制模块实现自主巡游;任务调度模块除了协调机器鱼的各个模块之间作业,主要是完成多参数水质环境的传感器数据采集、存储与传送;通信模块是实现机器鱼与上位机、服务器、数据库存储系统之间信息交互;电源模块包含蓄电池组、逆变器、控制器、串口服务器及供电模块;鳍部除了常备的尾鳍外,为了巡游与避障考虑,特别增加了左右腹鳍及背鳍部分,真正实现三维结构的路径设计。各鳍部模块包括鳍关节电机、传动机构、鳍翼、水箱及水箱泵组成,其中尾鳍摆动或波动是机器鱼的主要巡游工具,潜水控制模块、水箱及气泵除协助背鳍、左右腹鳍上浮、下潜及左右转向外,可实现排空水箱后使机器鱼升至水面以便维护与维修。
2.2 巡游避障系统与算法设计
巡游避障系统是通过红外线漫反射式避障传感器(即红外传感器)实现的。这种传感器是由红外接收管和发射管、发射和接收处理电路组成。电路设计时考虑有障碍物时,接收电路端口输出高电平,无障碍时则输出低电平。通过高低电平来识别是否有障碍物[5]。考虑到机器鱼在水中光衰减明显使得距离分辨率低,因此除在常设的鱼眼及嘴部外,在背鳍、左右腹鳍增加红外传感器,确保巡游过程中的避障与快速逃逸能力。其三维空间节点分布如图3所示。由于增加多点空间布局,参考离散域蚁群算法[6],利用空间等分网格方法[7],将机器鱼避障传感器节点设计如下:

图3 传感器节点分布
假设6个传感器的信号向量为Smi(左腹鳍)、Smr(右腹鳍)、Smf(嘴)、Smb(背鳍)、Smif(左眼)及Smrf(右眼),垂直三层分布,嘴、左右腹鳍为水平底层,左右眼为中间层(为方便计算,设定与水平底面及垂直剖面夹角都为β等于450),背鳍为顶层。机器鱼实时运动的线速度为υ,电子罗盘N的偏角为θ,各传感器与所对的实时运动轨迹相对分辨率为αi,αr,αf,αb,αif,αrf,设定αi=αif,αf=αb,αr=αrf,定义机器鱼在单位时刻t的碰撞函数[8]为Riskt,利用路径优化搜索算法[9]得到:
Riskt=-(Smi,t·αi,t+Smr,t·αr,t+Smf,t·αf,t+Smb,t·αb,t+
Smif,t·αif,t+Smrf,t·αrf,t)=
-[(Smi,t+Smif,t)·(90°-θt)+Smr,t+Smrf,t·
(90°+θt)+(Smf,t+Smb,t)·|θt|]
(1)
如果Riskt值越小,机器鱼碰撞可能性越小。巡游与障碍、传感器信号向量、Riskt值相对应,设巡游规则线性集合为φAction,巡游实时指令为Actiont,依据三维空间路径规划算法[10]得出:
φAction={Action|υ{υt},θ{θt},α{αl,t,αr,t,αf,t,
αb,t,αlf,t,αrf,t}}
(2)
minActiontεφAction{Riskt}=minActiontεφAction[(Sml,t+Smlf,t)·
(90°-θt)+(Smr,t+Smrf,t)·(90°+θt)+(Smf,t+Smb,t·
|θt|)]
(3)

表1 巡游避障线性集定义
3 系统硬件设计
集成了多传感器的机器鱼构成了WSNs的终端节点群,终端节点群通过CC2530的RF射频模块与网络协调器通信,嵌入WiFi模块的网络协调器(已设计成机器鱼)是构成ZigBee网络的网关或路由节点,当终端节点群正常加入到自组建ZigBee网络后,便开始把多参数传感器数据帧发送到路由节点上,路由节点接收数据是通过OSAL操作系统机制将数据封装成一个消息,然后放入消息队列中。嵌入WiFi模块的网关从消息队列中取得所需要的数据,利用WiFi模块获得Web服务器远程IP地址的高端端口,并发送到数据库服务器对应的表中,其他工作全部交给ZigBee协议栈自动完成,从而实现了多传感器数据的自动采集与上传[12]。
3.1 终端节点(EndDevice)的设计
终端节点设备安装在机器鱼的头部及胸腔部位,包括避障、水质采样与控制模块(传感器、采集模块、模数转换设备、继电器、总线模块、通讯转换器)、电源模块、通信与定位导航模块、支持RF射频的主控模块及电路等。
传感器采集的信号首先要进行信号放大电路及多路信号抗干扰电路处理,模拟量是通过多通道采集模块(16路4~20 mA直流信号)利用RS485接口连接通讯转换器转RS232接入片上系统(SoC)CC2530对应的信号I/O引脚,开关量采集的传感器信号量主要用来控制机器鱼输出信号与接收指令,所不同的是采用多通道的数字开关量采集模块。
3.2 协调器(Coordinator)的设计
由终端节点与协调器组成的机器鱼群是利用ZigBee协议自组建网络的,协调器利用WiFi通信模块把数据发送到上位机数据库服务器上,并能够接收上位机通讯指令控制机器鱼群避障巡游。协调器作为鱼群一员除具有普通机器鱼结构外,另外增加WiFi通信模块及热点自动漫游切换功能以实现数据的远程全天候无线传输[13]。在设计信道传输数据时,是把数字量模块和模拟量模块采集到的数据进行封装组成一个数据包,考虑到现场采集信号过程的干扰与冗余,需要进行信号放大、抗扰及算法加密,通过通信模块并辅以采集点GPS定位导航模块发送到数据处理中心。协调器的结构设计如图4所示[14-15]。

图4 协调器结构设计
4 系统软件设计
4.1 下位机机器鱼巡游控制系统设计与WSNs鱼群流程设计
本系统首先设计出所有机器鱼巡游控制,使之能到达设计路径指定地点,并通过ZigBee网络,使处于协调器与终端节点状态下的各机器鱼自组构建机器鱼群网络,并在TOP图上能够显示所有机器鱼的正常连接状态。其设计流程[16]如图5所示。
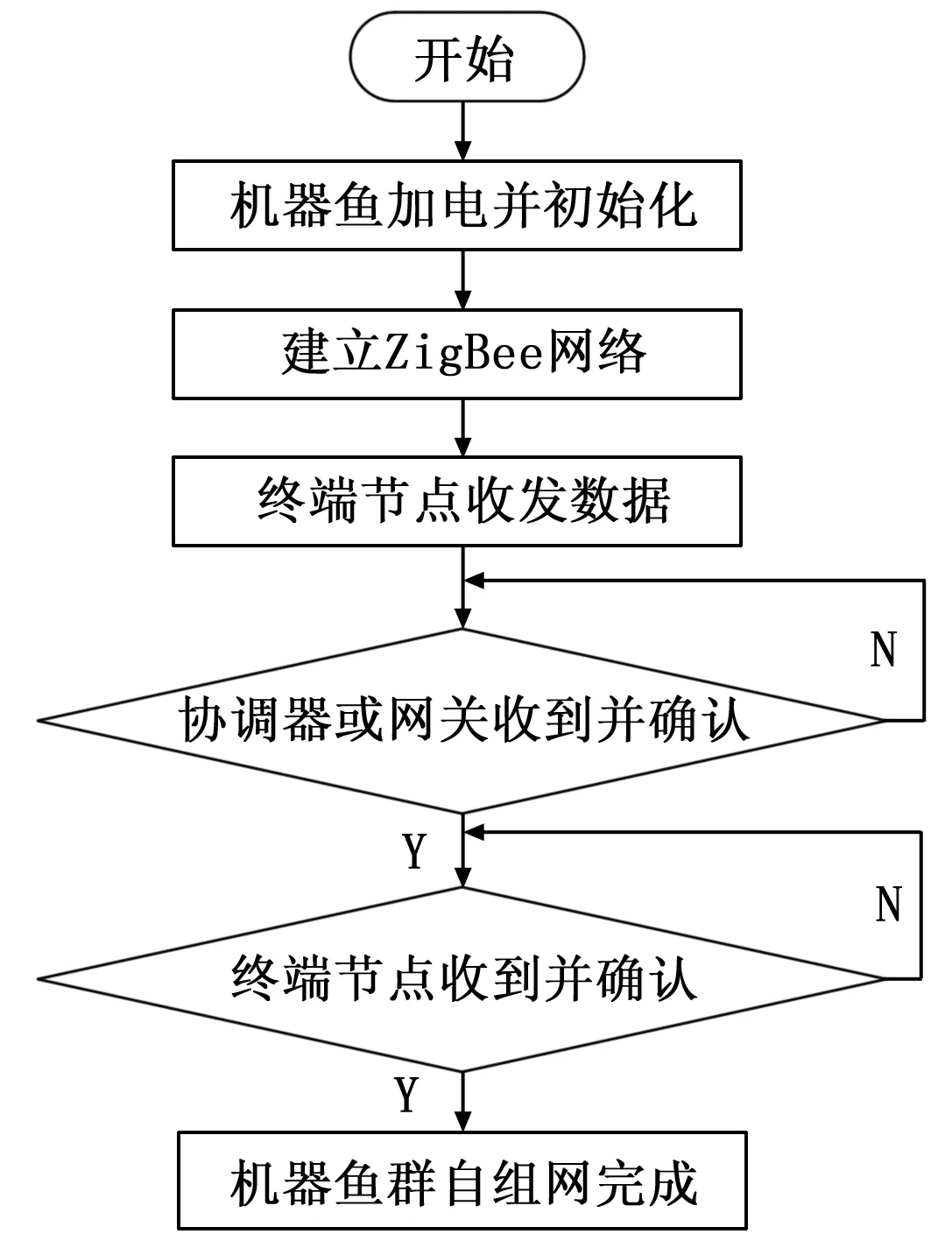
图5 组网流程图
下位机终端巡游控制与显示系统是利用安卓程序设计,实现手动控制机器鱼的运动轨迹,并能屏显水质传感器的实时数据,其基本设计流程[17-18]如图6所示。

图6 Android程序流程图
Android 客户端的开发工具为Eclipse,开发环境为其内嵌的AndroidSDK及JDK容器。其编程方法首先通过自主知识产权的中间件技术(专利号ZL201521063155.6)让终端机器鱼节点通过协调器注册并允许自组建ZigBee网络,然后设计出监测界面线性布局,最后在主程序文件中按照设计流程进行程序设计,程序运行的客户端界面如图7所示。这里的启动按钮是开始接收传感器实时数据信息,并在对应的控件上显示数值,停止按钮是中止数据采集使机器鱼巡游进入下一测定地点,其它按钮为控制机器鱼的巡游轨迹[19-20]。

图7 Android客户端程序界面
4.2 上位机数据库系统设计及过程实现
远程数据处理中心数据库管理系统选择MSSQL2008R2并开放上位机外网IP地址的14333端口使之可以远程数据连接与服务,设计过程如下。
4.2.1 数据库的创建
创建datainfo(上传传感器原始数据并处理)及device(包括传感器在内的所有系统设备管理)数据库并附加到SQL Server2008中。
4.2.2 数据表的设计
dbo.DataInfo表结构包括ID、Code、DeviceID、OriginalData、ProcessData、WriteTime、IsValid、Upload及备注等字段名,通过网关中间件上传获取的实时记录如图8所示。
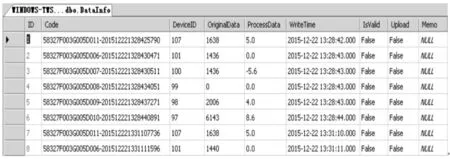
图8 datainfo数据表结构及记录
Dbo.Device数据表结构包括ID、Code、Name、WsnNodesID、SensorId、RegistersId、LatestValue、ProtocalTypeID、LatestProcessedValue、Upload、LatestTime、DeviceTypeID、FirstID、SecondID及备注等字段名等,图9给出不同传感器数据采集相关的实时记录。
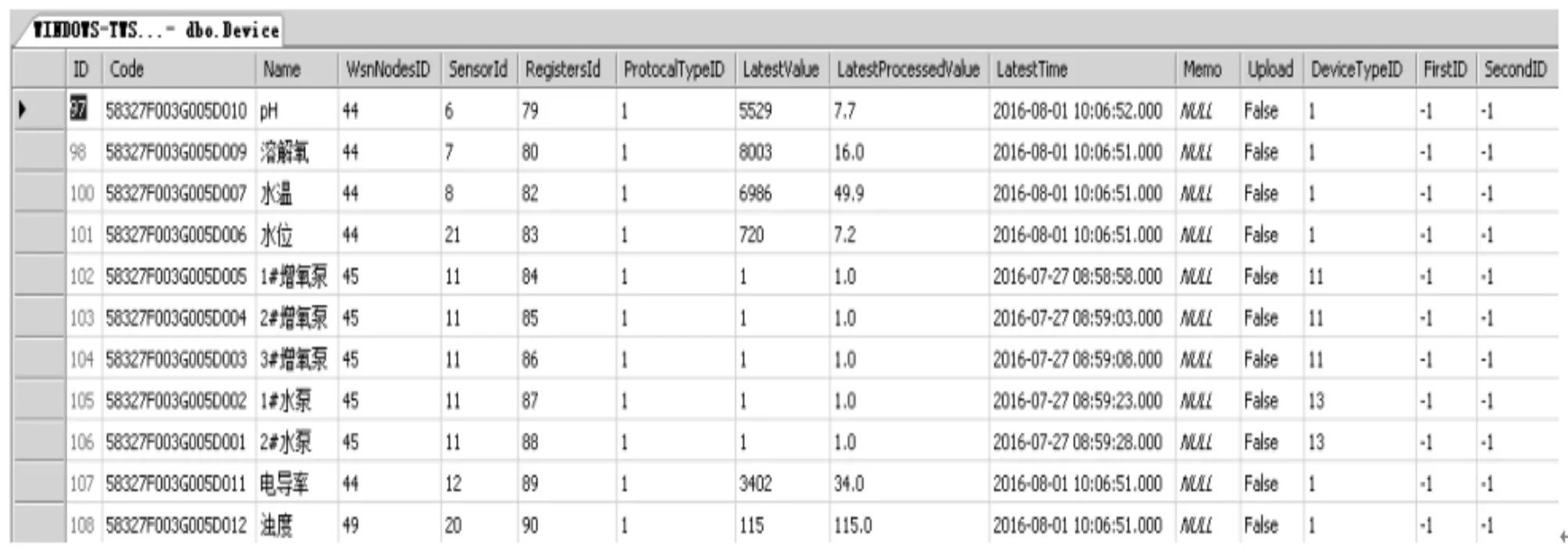
图9 device数据表结构及记录
各传感器表结构(以溶解氧dbo.AlarmInfo为例)包括SerialNum、DeviceSerialNum、Data、Unit、Max、Min、CreateTime、IsProcessed、ProcessTime、ID及备注等字段名及传感器每隔一定时间(目前设定为3秒)实时状态值如图10所示。

图10 传感器表结构与记录
其他还包括设备运行日志表(dbo.DeviceLog)、设备类型表(dbo.DeviceType)、传感器参数配置(dbo.ParmeterConfig)、传感器及所有设备基础定义(dbo.Sensor)、节点信息与控制表(dbo.WsnNodes)、协议类型定义(dbo.ProtocalType)、传感器注册设定(dbo.Registers)及Web设计相关表如系统调用的函数定义(dbo.SysFunction)、Web站点远程登录(dbo.SysLogin)、报警的语音定义(dbo.TTSData)等,用设备ID和采集时间作为主键索引。
4.3 上位机水质在线监测系统的功能设计与案例实现
上位机Web服务器利用IIS构架及XML Web Service构建,Web界面采用Microsoft Visual Studio 2015设计。
水质实时监测系统设计的功能模块包括:水质监测实时环境、设备控制及控制记录、水质数据查询及预警子系统。系统基于.NET框架进行的Web系统设计,B/S模式实现过程[21],主要包括系统远程登录管理、节点管理、实时监测与显示及图表数据管理等。水质预警与峰值报警在.NET系统可设计基线阈值范围,预警也可以进行移动终端设计,开发基于Android平台的APP在移动终端及短信接口,利用WLAN或GPRS接入到远程服务器数据中心后台就可以实时了解水质动态值及报警短信提醒。
基于上述设计,现选定区域内陆湖泊巢湖进行实测,对系统实现的主要功能进行演示。
在主页面通过注册用户合法登录后,在Web系统页面选定“实时环境”选项,可以查看并搜索各传感器监测的实时数据“设备控制与控制记录”选项,“手动控制”可以对机器鱼水箱内水泵、增氧泵进行控制以实现机器鱼上升与下潜及水质溶解氧补给,“预警设置”可以对各传感器阈值进行设定上下临界点,“控制信息”及“报警记录”是操控相关的日志信息“数据查询”选项主要是选定传感器类型按采集的起止日期对传感器的实时数据进行图表形式的动态显示,为峰值预警及数据分析、数据模型建立提供服务如图11所示。
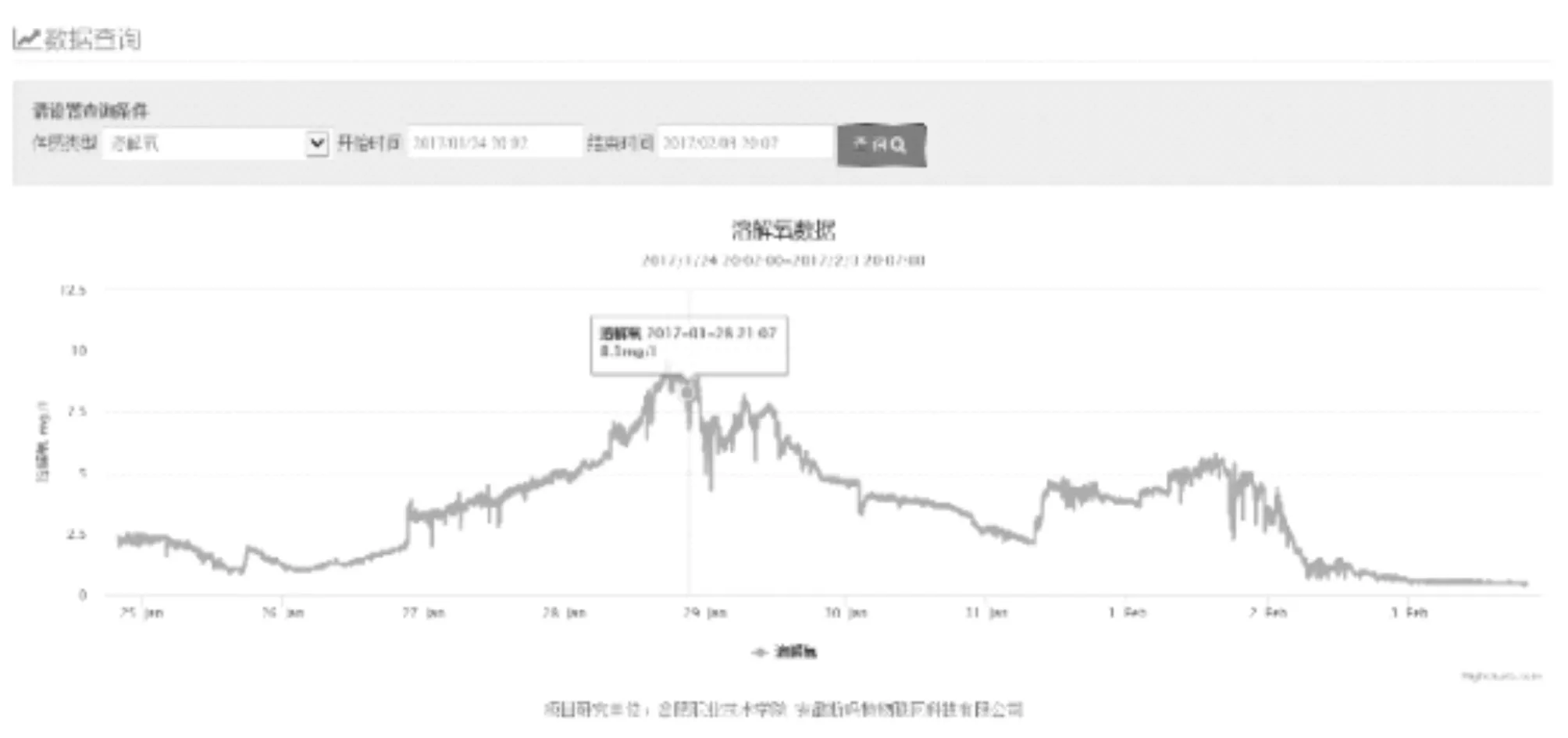
图11 传感器历史数据查询
4.4 测试样本分析
设计的系统是通过区域选定,在内陆湖泊巢湖的东岸、中心岛、西岸、两条主要入湖河流河口筛选5个巡游内测点进行试验。
首先让终端节点机器鱼及携带WiFi通信模块与网关的协调器机器鱼用手机终端APP程序控制到达设定的路径采集点附近,查看WSNs的节点TOP图,确定终端节点与协调器机器鱼群自组网成功后,按手机APP界面上的“开始”按钮开始测量该点附近的水质参数,包括水温水位、溶解氧、PH 值、电导率、浊度和测量点对应的经纬度等信息,同时实测点投放一台高精度Hydrolab多参数水质实测分析仪、一台恩智浦陀螺经纬仪(可以很方便地转换成Matlab坐标)用于实时采集数据备本,以便对测得的经纬度、水质实测数据与系统获取的数据进行对比分析,每个采集点每天都是从早晨10左右开始连续取样30分钟后(设定每2分钟自动取样一次,每个采集点取样本15次),按“停止”按钮,利用APP程序其他控制按钮可以让机器鱼群巡游到下一个采集点进行实测试验。通过对5个巡游点八种参数实测与设计开发的系统取值量值(表2至表5)数据对比可绘制出线性图,5个点图形基本一致,现选定中心岛测定点样本图(如图12所示)进行分析。
从图12可以得到,水温、溶解氧、PH值、电导率测定值与实际值也有一定的误差,其中水温、溶解氧、PH值平均误差率分别为0.18%、0.5%及0.01%相比王士明等人提出的仅利用WSNs网络的0.79%、2.7%和0.52%具有明显的测定精度优势。
从多因素分析确定引起误差是由于实测后期机器鱼在水中受风产生的波浪的影响最大,另外算法、选定的传感器品质、采集与上传时延、样本选址等也会产生一定的阈值变化,且差异相比初值的梯度误差随采集时间有逐步增大的现象,后期还须深入研究,找出原因并给予校正。其他传感器与经纬度数据的实测值与实际值,经过多次实测、算法修正与较验,目前离散性极小,几乎忽略不计,系统测量显示的数据与高精度水质分析仪、陀螺仪获得的数据基本一致,系统基本能够满足水质在线监测的需求。

图12 样本线性图
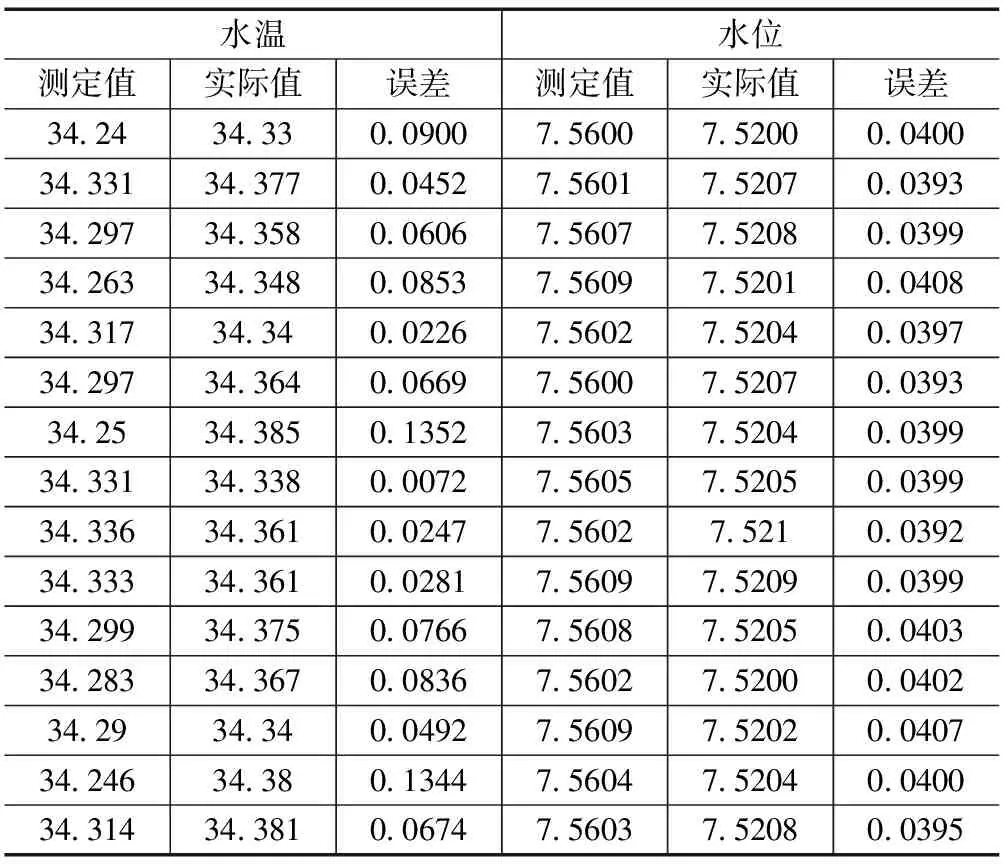
表2 水温、水位实测值及误差
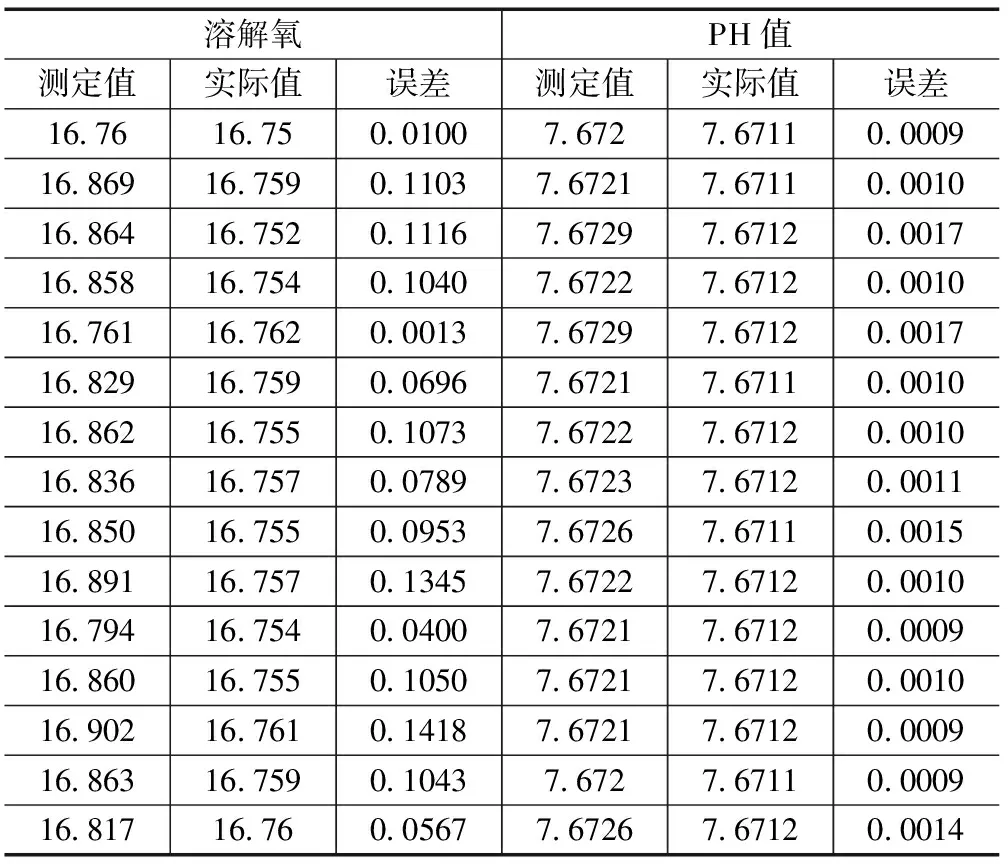
表3 溶解氧与PH值实测值及误差

表4 电导率、浊度实测值及误差
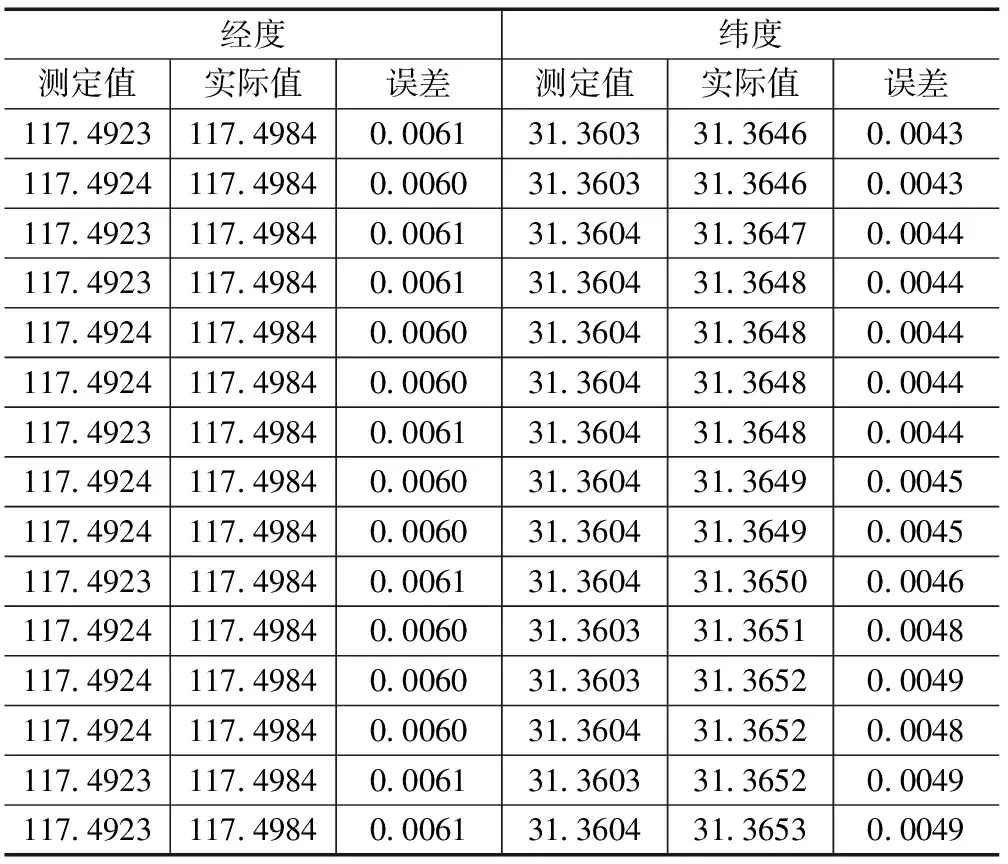
表5 经纬度实测值及误差
与该系统相关的自动巡游轨迹及避障算法研究、机器鱼自动导航与定位实现、多水质传感器的研发、实测样本差异性分析与优化、多样本大数据挖掘与预警模型再造等研究也取得预期的进展,确保了平台实用性、精准性与可延展性。
5 结束语
大范围河湖特别是“三河三湖”水环境智能及远程监测系统目前主要还是采用国家级固定基站为主、区域二级布点加上移动节点、航标船只等采样获得,成本高,实时性差,数据采样精度不高。利用基于WSNs技术的机器鱼,携带多参数传感器,通过远程WiFi通信实现对区域内水质实时监测,不仅集成了固定节点与移动节点诸多优点,而且成本低,布点、数据采集与传送灵活。同时机器鱼巡游、自组网、受控便捷,采集点路径规划及到达率高,受天气等外环境影响小,对水环境监测特别是水下实时监测非常实用。同时移动终端的设计对机器鱼巡游控制非常方便,Web桌面开发使得水质环境实时显示、分析、水箱控制及峰值预警提供的方案实用、有效、可行。目前通过在十多家企事业单位(包括饮用型水库、大规模精细水产养殖场等)推广应用,系统稳定可靠,监测、预警预报、增氧等措施及时便捷,值得推广应用。
[1] 王士明,俞阿龙,杨维卫.基于ZigBee的大水域水质环境监测系统设计[J].传感器与微系统,2014,33(11):102-105.
[2] 付焕森,曹 健,李元贵.基于ZigBee和GPRS的仿真机器鱼水质监测系统设计[J].中国农机化学报,2016,37(7):179-182.
[3] 王英帅,张 乐,蒋 鹏.基于传感器网络的水环境监测系统[J].杭州电子科技大学学报,2014,34(5):91-95.
[4] 周 超,曹志强,王 硕,等.微小型仿生机器鱼设计与实时路径规划[J].自动化学报,2008,34(7):772-777.
[5] 桑海泉,王 硕,谭 民,等.基于红外传感器的仿生机器鱼自主避障控制[J].系统仿真学报,2005,17(6):1400-1404.
[6] Liao T,Stützle T,Montes de Oca M A,et al.A Unified Ant Colony Optimization Algorithm for Continuous Optimization[J].European Journal of perational Research,2014,234(3):597-609.
[7] 马 腾,赵兴忠,高博青.自由曲面形状和拓扑联合优化研究[J].浙江大学学报工学版,2015,49(10):1946-1951.
[8] Lai Y C,Lin C C.A Pair-Resolution Blocking Algorithm on Adaptive Binary Splitting for RFID Tag Identification[J]. IEEE Communications Letters,2008,12(6):432-434.
[9] Mika T.Rantanen,Martti Juhola.A Configuration Deactivation Algorithm for Boosting Probabilistic Roadmap Planning of Robots[J].International Journal of Automation and Computing,2012,9(2):155-164.
[10] 齐 勇,魏志强,殷 波,等,于忠达,庄晓东.增强蚁群算法的机器人最优路径规划[J].哈尔滨工业大学学报,2009,41(3):130-133
[11] 童晓红,陈 玲,徐 伟,等.基于WSNs的巢湖水质监测系统的设计[J].巢湖学院学报,2015,17(6):84-89.
[12] 刘 洋.湖泊水质检测机器鱼的研究[D].武汉:华中科技大学,2012.
[13] 张礼杰,殷建军,项祖丰,等.多传感器集成水质检测系统的设计[J].工业仪表与自动化装置,2011(1):49-52.
[14] 李金凤,刘丰喜,杨中华,等.基于无线传感器网络及GPRS的水质监测系统设计[J].计算机测量与控制,2014,22(12):3887-3890.
[15] 彭 亮.基于模糊BP网络的机器鱼水质分析系统设计[D].武汉:华中科技大学,2013.
[16] 童晓红,陈 玲.基于数据包捕获分析ZigBee网络建立过程[J].佳木斯大学学报(自然科学版),2015,33(6):892-895.
[17] 刘星桥,陈海磊,朱成云.基于GPS的自学习导航游弋式水质监测系统设计[J].农业工程学报,2016,32(1):84-90.
[18] BILL PHILLIPS,BRIAN HARDY.Android编程权威指南[M].北京:人民邮电出版社,2014.
[19] IAN G.CLIFTON.Android用户界面设计[M].北京:电子工业出版社,2014.
[20] 王卫星,高奕龙,陈彬彬,陈佳森,朱智斌.无人驾驶自动导航水质监测船[J].信息技术与信息化,2014(5):36-38.
[21] 黄 欢.基于Web的三峡库区水质监测及分析系统的研究与设计[D].重庆:重庆大学,2009.
Design on Monitoring System for Inland Lake Water Quality Based on Robotic Fish
Tong Xiaohong1,Chen Ling1,Hua Yan1,Yang Lei2
(1.Information Center,Hefei Vocational and Technical College,Hefei 238000,China; 2.Anhui Smart Internet of things Technology Co., Ltd.,Hefei 231000,China)
online measurement of transmission and storage data packet loss rate is high due to the remote multi hop communication rely only onWireless sensor networks. The obstacle avoidance ability of the simulation robot fish in the two-dimensional structural design stage is poor. data acquisition and transmission costs of GPRS traffic is high all weather.in order to solve the above problems, a set of rea-time monitoring system of water quality for automatic obstacle avoidance is designed. the system is designed by using the mobile terminal program, using 3D acquisition path tracking algorithm and WSNs and Wifi hot spot technology to realize the precise control of the robot fish, according the set depth and planning of acquisition point, achieve five water quality environmental datas including of water level and temperature, pH, dissolved oxygen, conductivity, turbidity, etc in real-time acquisition, processing, remote storage, display, analysis and warning. the overall design of the system, the structure and control system design, the hardware system of the terminal node and coordinator, the software design of the upper and lower computer are given.the application of the system to the five sampling points in the Chaohu Lake,the average error rate of water temperature, dissolved oxygen and pH value were 0.18%, 0.5% and 0.01%, respectively,much higher than other water quality on-line monitoring accuracy requirements,to achieve the expected results. It has a very high value for the on-line monitoring and early warning ofreservoir and fine aquaculture.
WSNs; WiFi; robotic fish; inland lake; water quality monitoring; system design
2017-02-04;
2017-03-13。
安徽省自然科学研究重点基金项目(KJ2014A219)
童晓红(1965-),男,安徽合肥人,工学硕士,副教授,研究方向为物联网技术与应用
1671-4598(2017)05-0056-06
10.16526/j.cnki.11-4762/tp.2017.05.017
TP273
A
猜你喜欢
环球时报(2022-07-13)2022-07-13
环球时报(2022-04-18)2022-04-18
环球时报(2022-03-14)2022-03-14
百科探秘·海底世界(2021年8期)2021-08-03
建材发展导向(2021年9期)2021-07-16
今日农业(2020年13期)2020-12-15
建材发展导向(2019年10期)2019-08-24
电影(2018年8期)2018-09-21
电子制作(2018年14期)2018-08-21
世界文学评论(2014年2期)2014-04-12
