
基于无杆牵引车的舰载机路径跟踪控制
2017-05-24 14:45范加利
计算机测量与控制 2017年5期
王 正,黄 葵,范加利
(海军航空工程学院 青岛校区,山东 青岛 266041)
基于无杆牵引车的舰载机路径跟踪控制
王 正,黄 葵,范加利
(海军航空工程学院 青岛校区,山东 青岛 266041)
针对航母机库空间狭小、障碍物多等因素导致舰载机转运难度大的问题,以无杆牵引车和舰载机组成的铰接系统为研究对象,研究了舰载机在机库甲板调运作业的路径自动跟踪问题,建立了基于无杆牵引车的舰载机转运模型,将舰载机期望路径近似为直线和圆弧的组合,基于反馈线性化和时间-状态形式设计各路段的跟踪控制律,仿真结果表明,所设计的控制律和各控制律间的切换策略可实现舰载机沿组合路径的跟踪;基于自动跟踪的调运,可放宽对牵引车司机牵引技术的要求,确保调运作业时间准确、可控;该研究为后续自动跟踪的实现打下基础。
舰载机;路径跟踪;反馈线性化;转运模型
0 引言
航空母舰是以舰载机为作战武器的大型海上平台,其战斗力的发挥取决于搭载的舰载机数量和其出动强度。航母上舰载机的布列位置包括机库和飞行甲板。国内外学者对机库甲板舰载机的最优化布列和路径规划问题做了大量研究,目的在于最大化利用机库空间搭载更多的飞机,并取得了一定的成果[1-4]。然而,随着机库内舰载机数量的增多,必然增加舰载机在机库内调运作业的难度和复杂性复杂性,影响调运作业效率,而调运作业效率是影响舰载机出动强度的关键因素之一。当前,舰载机调运作业主要依靠引导员和牵引车司机的密切配合来完成,其中牵引车司机的技术和经验尤其关键,本文针对舰载机调运在实际实施中遇到的熟练司机少、培养难度大、路径跟踪难等问题,研究了使用无杆牵引车进行舰载机调运的路径自动跟踪问题,以期指导人员培训,并为舰载机调运作业辅助(自动)实施系统的研制打下理论基础。使用牵引车转运舰载机的运动可以建模为一类典型的带有拖车的拖挂式移动机器人的运动,国内外学者针对带拖车移动机器人的路径规划与跟踪进行了大量的研究工作[5-7],并取得了丰硕的可供借鉴研究结果。
1 舰载机转运的运动学模型
使用无杆牵引车转运舰载机的示意图如图1所示。假设:(1)舰载机在转运过程中各轮均无滑动;(2)假设舰载机的前轮与牵引车的铰接点位于牵引车后轮中心点处。以舰载机两主轮中点处(xa,ya)为研究点建立牵引系统的运动学方程为:
(1)
其中:vc为牵引车的速度,δ为牵引车前轮转角,lc为牵引车前后轮轴之间的距离,θ为舰载机的艏向角,φ是舰载机纵轴和牵引车纵轴之间的夹角。
定义状态变量x=(x2,y2,φ,θ)T,系统(1)可以表示为如下形式:
(2)


图1 无杆牵引系统示意图
2 路径跟踪控制器
2.1 直线路径跟踪控制器设计
对于直线路径跟踪问题,对系统(2)定义坐标变换:
(3)
定义输入变换:
(4)
系统(2)的状态方程可变换为:
(5)
(6)
由于机械约束的存在使得:
(7)
则当vc>0,xa为严格单调增函数,当vc<0,xa为严格单调减函数,因此,可以通过式(6),控制状态方程(5)中的时间标量xa。对于状态方程(5),通过坐标变换:
(8)
和反馈控制律:
(9)
分别求ξ1,ξ2,ξ3对xa的导数,并视υ为新的输入变量,可得状态方程(5)的精确线性化形式为:
(10)
对于系统(10),可采用线性系统控制器设计方法设计其控制规律为:
(11)
利用坐标变换(8)可得:
(12)
并将(12)式代入(9),可得状态方程(5)的控制律,从(12)和(9)可以发现,输入δ可以仅由状态ya,θ和φ决定。而且,如果反馈控制律(12)镇定系统(10), 随着xa→∞,将有ξ→0。因此随着xa的增加ya,φ和θ都将趋近于0。因为当牵引车正向运动时,xa单调增加,则舰载机将逐步跟踪X轴。
对于跟踪问题,可对于线性化系统(10)采用控制律:
(13)
其中:yr为期望输出。利用式(9),控制律(13)可改写为:
(14)
2.2 圆弧路径跟踪控制器设计
对于圆弧形路径跟踪问题,仍可采用第3.1节中的控制律设计方法,唯一不同的是时间标量和状态变量的选择。
为简化计算,如图1所示,用极坐标形式表示舰载机主轮中心位置为(γ,r),极坐标原点取为期望圆弧路径的中心,期望圆弧路径的半径为R。控制目标是随着牵引车的前向或后向运动使得r→R。
当牵引车与舰载机构成的运动体沿圆弧顺时针方向运动时,γ单调增加,此时使用λ=Rγ为时间标量。可以很容易得出如下形式的舰载机极坐标下的运动方程:
(15)
其中:时间标量λ对时间导数如下:
(16)
使用如下坐标变换和反馈律:
(17)
(18)
其中:υ为新的输入变量,α=θ-γ。通过变换(17)和反馈(18),状态方程(15)可精确线性化为形式如(0)式的线性系统,其中用l代替xa,后续的控制律设计方法与上一节相同。
舰载机移动路径可以近似为若干直线运动和圆弧运动的组合,该路径可表示为SP={Li}。相应地有控制器集合CP={υi}。根据期望路径在这些控制器间切换,从而实现任意路径的跟踪控制。对于复杂控制策略,控制律间的切换容易导致整个闭环系统的不稳定。针对这一问题,采用以下控制器切换策略,首先,应保证控制器切换过程中牵引车的操舵角连续。考虑两条交叉直线的跟踪问题,建设舰载机先沿直线1移动,到交叉点C后沿直线2移动。当舰载机靠近交叉点时(舰载机参考位置在以点C为圆心,以RC为半径的圆内),同时计算沿直线1和沿直线2的控制输入,当二者相等时,切换控制器。当跟踪路线在直线和圆弧之间切换时,采用同一切换策略。在切换控制策略下,闭环系统稳定性的证明见文献[5]。
3 仿真研究

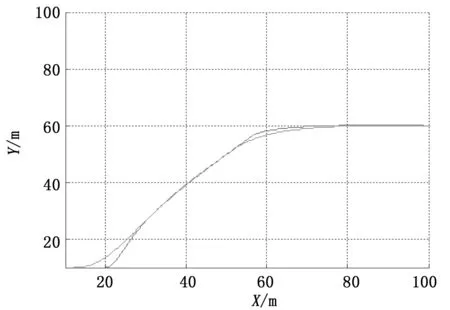
图2 舰载机参考点运功轨迹

图3 舰载机航向角和φ角响应曲线

图4 牵引车前轮转向角(控制输入)
仿真曲线表明,本文设计的控制律可实现舰载机在路径1和路径2上的跟踪。当舰载机的参考点落入以路径交叉点为圆心,半径为3m的圆内,实实施跟踪控制律切换,仿真表明,该在切换策略和控制律作用下系统保持稳定,并能快速跟踪上期望路径。
4 结论
使用无杆牵引车牵引舰载机的运动学模型为一类非线性不完整约束系统模型,针对舰载机牵引路径的跟踪问题,文中采用将期望路径等效为若干直线和圆弧的组合,对直线和圆弧分别采用时间—状态转换形式分别在直角坐标系下和极坐标系下设计跟踪控制器,并采用一种保证闭环稳定的控制器切换策略,仿真研究表明文中所设计的控制器能够实现舰载机牵引路径的跟踪。
[1] 张 智,林圣琳,邱 兵,等. 舰载机牵引系统甲板调运路径避碰规划[J]. 系统工程与电子技术,2014,36(8):1551-1557.
[2] 张 智,林圣琳,夏桂华,等. 舰载机甲板调运过程避碰路径规划研究 [J].哈尔滨工程大学学报,2014,35(1):9-15.
[3] 王能建,刘红博,周丽杰. 甲板上舰载机牵引系统的行驶特性分析 [J]. 中南大学学报(自然科学版),2013,44(6):2305-2310.
[4] 刘亚杰,李忠猛,陈晓山. 考虑空间约束的机库舰载机调运路径规划方法[J]. 海军工程大学学报,2014,26(3):100-107.
[5]RyanJC,CummnigsML,RoyN,etal.Designinganinteractivelocalandglobaldecisionsupportsystemforaircraftcarrierdeckscheduling[C].AIAA.CambridgeTown,USA,2011.
[6] 刘 昱,马保离. 离轴式拖车移动机器人的任意路径跟踪控制[J]. 控制理论与应用,2013,30(4):526-529.
[7] 张 勇,张晓华,程 金,等. 拖挂式移动机器人非连续反馈镇定控制[J]. 系统仿真学报,2011,23(6):1229-1232.
Path Tracking Control for Carrier Aircraft Handled by Tractor Without Bar
Wang Zheng, Huang Kui, Fan Jiali
(Naval Aviation Engineering Institute-Qingdao Branch, Qingdao 266041,China)
Aim at some difficulty problem such as narrowness space and multi-obstacles, path tracking of carrier aircraft in carrier hangar was studied. The articulated vehicle with tractor and aircraft was selected as study object. The kinematics model of carrier aircraft handling based on non-bar tractor. The path tracking controllers for rectilinear and circular paths were designed separately based on feedback linearization and time-state system model. The switching strategy for the two controller was proposed also. The simulation results show that the proposed controllers and switching strategy can realize arbitrary path tracking for carrier aircraft. The demand for tracking skill of handling crew can be released by the handling task based on automatically tracking, and the handling time would be exact and controlled. This study was the ground for realization of automatic handling.
carrier aircraft; path tracking; feedback linearization;kinematics model
2016-11-22;
2016-12-19。
王 正(1970-),男,山东青岛人,副教授,主要从事舰面航空保障系统控制方向的研究。
1671-4598(2017)05-0099-02
10.16526/j.cnki.11-4762/tp.2017.05.027
TP273
A
猜你喜欢
煤气与热力(2021年6期)2021-07-28
指挥控制与仿真(2021年3期)2021-06-15
中国舰船研究(2021年3期)2021-06-08
兵器装备工程学报(2021年1期)2021-02-22
兽医导刊(2020年10期)2020-12-30
航空维修与工程(2019年3期)2019-09-10
价值工程(2018年13期)2018-05-03
北京航空航天大学学报(2017年1期)2017-11-24
军事运筹与系统工程(2017年4期)2017-08-29
指挥控制与仿真(2017年2期)2017-05-11
