FANUC机器人在车桥喷涂上的应用
2017-05-29 08:35马林科
汽车实用技术 2017年23期
马林科
(陕西汉德车桥有限公司,陕西 西安 710021)
前言
近年来随着国内经济的快速发展,客车、重型卡车、工程车等汽车市场需求迅速增长,尤其在2017年,重卡行业呈翻番式增长,这对各生产厂的产能提出了新的需求跟考验。传统的车桥喷涂一般都是采用人工喷涂,该形式工作效率及产品质量稳定性均较低,漆料浪费大。为了对该问题进行改善,我公司对桥总成涂装生产线进行改造,在车桥喷涂过程中采用机器人喷涂系统,本文就此做以介绍。
1 前期方案准备
对于在原有的生产线进行改造,增加机器人喷涂系统,除要考虑机器人的选型问题外,还需重点考虑车间工艺布局及空间尺寸的问题。
1.1 机器人的选型
对于车桥喷涂机器人的选型,首先需要考虑工件的外形尺寸、喷涂位置面积、生产节拍、油漆相关参数等条件,从而来确定机器人喷涂系统和工艺布置方案。

图1 P250iB机器人及运动尺寸图
原有涂装线为普通悬链连续生产试结构,链速范围为(1.4-1.8)m/min,桥总成最大外形尺寸不超过2500mm×800 mm×600mm,在选择机器人时需保证其工作轨迹范围能够完全覆盖所需施工工件的相关表面,考虑到桥总成外形结构变化差异较大,个别部位喷涂时机器人需绕过凸起或干涉部位,故选用了FANUC的P250iB机器人。该机器人最大活动半径达 2800mm,机器人内部结构密封、防爆,且为空心手腕,避免了外部引线、管路等在运行过程中缠绕等问题,P250iB机器人及运动尺寸见图1。
1.2 机器人的工艺布局
原有涂装线喷漆室工艺布局为四个喷漆室,桥总成分左右两部分进行两遍油漆喷涂,该布局结构使得改造变得简单,只需要将第一、二喷漆室改造为机器人喷涂,第三、四喷漆室由人工进行补漆即可,唯一需要考虑的问题就是喷漆室内部空间能否满足PB250iB机器人的活动范围。

图2 喷漆室布局图
为了验证P250iB机器人能否在喷漆室内正常喷涂,通过发那科PaintPRO机器人喷涂离线编程软件进行模拟,将机器人在漆室内的位置、桥总成数模和相关工艺参数导入后,对机器人的喷涂轨迹进行编辑和模拟,确定机器人的合理安装位置。经过多次测试,喷漆室与悬链垂直方向墙壁与悬链距离偏近,导致机器人与墙壁安全距离太小,易发生撞墙风险。如图2所示,我们将喷漆室与悬链垂直方向进行扩建,增加喷漆室该方向的长度350mm。
2 桥型的识别
由于车桥的品种很多,需要在涂装线上进行混流生产,机器人在喷涂作业前必须知道当前桥总成的型号,FANUC机器人喷涂系统采用条形码加载码体系统进行桥型识别和机器人自动喷涂。
在车桥上件处提供一把扫描枪将代表车桥类型的条形码进行扫描,扫描的信息将通过载码体的读写头写入车桥挂具的载码体中,当车桥在进入机器人喷房前,位于喷房前的读写头将读取挂具上的载码体,读出车桥的类型信息,该信息将发给机器人的系统控制柜。当喷涂工件进入喷房后,系统控制柜将工件类型发给每台喷涂机器人,喷涂机器人就可以调取相应的程序进行喷涂。
3 输送链同步跟踪的实现
同步跟踪是保证工件运动与机器人喷涂动作正确实施的关键要素。系统通过脉冲编码器实时检测链速变化并把变化数值转化为脉冲值,传送给机器人控制器,始终保持示教时机器人动作与工件的相互位置与动作关系,从而确保喷涂质量。
如输送链停止,机器人能记忆当前位置并停机,输送链重新开动后机器人继续执行未完的部分程序。由于输送链紧急停止或正常停止时可输出相应的信号给机器人系统,机器人根据本系统的运行状态采取相应的动作,且记忆当前的工作状态,当输送链恢复正常时,机器人恢复到之前的工作状态。

图3 同步跟踪系统
4 喷涂程序的合理规划
机器人喷漆时,不同外形的桥型需分别对应一个喷涂程序,这就要求针对每种不同外形的桥型,都需要编制有相应的喷涂程序。
桥总成的喷涂程序主要是通过示教来编程的,故需要生产线停线进行编程,这将直接影响到产线的生产效率。这就要求我们在程序编制时能够高效、高质量的完成。
4.1 程序结构的创建
机器人喷涂应用程序主要有两种,即作业(Job)程序和进程(Process)程序,作业程序中主要包含CALL指令,进程程序中主要包含机器人的运动指令。机器人生产时执行的主程序必须为Job类型的作业程序,作业程序通过CALL指令来调用已编程好的进程程序。
对于喷涂程序的创建,遵循的原则应是通用性越强越好。从机器人的位置来看桥总成的外形,可以将桥总成分为主要的三大部分,即前制动鼓及轮毂部分、主减及桥壳部分、后制动鼓及轮毂部分,针对每部分分别编制程序,通过调用,完成主程序的编制。
某桥型喷涂作业程序内容:
1: CALL Q_ZDG_335 调用 前制动鼓部分程序(335为制动鼓特征尺寸)
2: CALL HDM485_ZJ 调用 主减部分程序
3: CALL H_ZDG_335 调用 后制动鼓部分程序
4: CALL HOME 调用 HOME程序(回原点)
END 程序结束
由于同一类型桥总成,制动鼓及轮边(毂)部分经常是相同或外形尺寸稍有差异,完全可以调用相同的子程序进行喷涂。将这三部分分别编制进程(Process)程序后,当出现新桥型时,只需对主减及桥壳部分程序内容进行示教更改即可完成新程序的编制,从而缩短新程序的编制时间。
4.2 机器人运动轨迹的规划
机器人运动轨迹的规划对机器人高效、稳定的运行具有重要意义,通过轨迹合理规划,使机器人运动平顺,减少冲击和振动,避免不必要的辅助运动。
轨迹规划其实就是将期望运动的描述转换成由时间序列定义的一条轨迹,而这一时间序列与机器人运行时的初始点、经过点、和终止点之间的位置有重要关系,图4对桥总成喷涂时机器人运动轨迹的初始点、经过点、和终止点做一个就简单的示意。

图4 机器人喷漆运动轨迹图
5 机器人使用过程中的问题及解决方法
(1)悬链定位精度差,机器人时常撞枪。普通悬链吊挂喷涂,存在一个较大的缺点就是定位精度比较差,尤其当机器人定位脉冲编码器位置与机器人之间存在悬链张紧时,机器人在喷漆时与桥总成的位置偏差甚至可以达到10cm以上。
针对该问题可以从以下方面查找解决:
①脉冲编码器位置与机器人位置中间不能有悬链的张紧设施存在,因为张紧设施的移动导致悬链的移动是不能被脉冲编码器侦测到的;②桥总成在上件吊挂时不要空吊挂工位,或者有规律性的间隔吊挂,这样桥总成在上下坡时不容易造成悬链堆积。③示教编程时,预留出安全距离。
(2)喷漆时桥总成同一部位喷枪不出漆。在喷涂桥总成时,时常会遇到同一喷涂程序,喷涂效果一直是正常的,突然出现连续批量性的该程序所喷涂的桥型每根桥的相同部位喷枪不出漆或出漆量特别少。
首先检查,排除油漆、空气管路,喷枪及气压等运行正常。若以上问题均排除,将机器人示教器打到机器人喷漆时的程序跟踪页面,观察机器人喷漆过程,当喷枪刚开始不出漆之前,机器人关节四、五或六轴应该有一个比较大幅度的关节转动(一般会大于135°),出漆不畅就是由于该大幅度的关节转动导致的油漆或空气管路的不畅造成的。记录下机器人喷涂时关节大幅度转动的程序行数,重新示教对该处程序进行更改,通过JOINT坐标系转动关节,加入过渡点引导机器人关节从反方向转动到下一位置点。
(3)桥总成与机器人定位位置统一超前或偏后。由于机器人定位光电移动、悬链改造等原因,导致正常喷漆时机器人所有喷涂点都比实际要喷涂位置偏前或偏后。
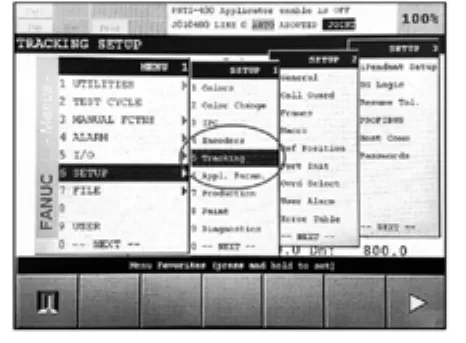
图5 示教器操作图
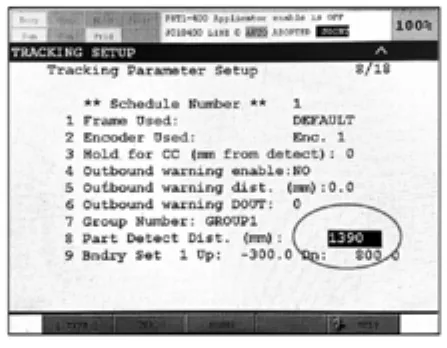
图6 示教器操作图
将机器人退出生产模式,按以下操作在示教器上进行更改即可完成重新定位:Menu—SETUP—Tracing(图 5),找到图6中界面,将第8行数字“1390” 进行更改,若给该数值加50,则为喷枪定位位置相对于桥总成向悬链运行方向移动50mm,减50则相反。
6 结语
通过对车桥涂装线进行机器人喷涂改造,不但提高了漆膜的外观质量,降低了漆料消耗,人工成本等,还提高了生产效率。随着各主机厂对生产效率、生产成本、产品质量等方面要求的进一步提高,机器人喷漆将成为不二选择。
[1] 王雷刚,崔旭冉,何龙等.浅谈 DURR 机器人汽车车身内板喷涂技术[J].现代涂料与涂装,2016(2):51-54.
[2] 高坤,邹大卫,李光.内表面喷涂机器人的新车型精益调试[J].现代涂料与涂装, 2016(2):34-38.
[3] 赵宏剑,赵增强.汽车车桥喷漆的机器人解决方案[J].制造业自动化,2009(7):54-57.
[4] 上海发那科有限公司.FANUC机器人培训教材[M].上海,2003.
猜你喜欢
汽车与新动力(2022年2期)2022-07-21
新疆有色金属(2021年2期)2021-05-22
能源工程(2021年1期)2021-04-13
专用汽车(2020年10期)2020-10-26
科学导报·学术(2020年73期)2020-07-14
大众汽车(2019年8期)2019-12-06
科学与财富(2018年18期)2018-08-09
汽车维护与修理(2018年14期)2018-08-07
汽车维护与修理(2018年10期)2018-08-07
电子技术与软件工程(2017年22期)2018-01-17