
对心直动滚子从动件盘形凸轮机构精确解与近似解的比较
2017-06-01 11:35董冠文李宗义甘肃机电职业技术学院甘肃天水741001
锻压装备与制造技术 2017年2期
董冠文,李宗义(甘肃机电职业技术学院,甘肃 天水 741001)
对心直动滚子从动件盘形凸轮机构精确解与近似解的比较
董冠文,李宗义
(甘肃机电职业技术学院,甘肃 天水 741001)
分析和比较了对心直动滚子从动件盘形凸轮机构顶杆运动方程的近似解和精确解。推导了理想状态下对心直动滚子从动件盘形凸轮机构顶杆运动方程的精确表达式,使用Taylor级数将精确表达式展开,通过数值算例,获得了顶杆的位移、速度和加速度表达式的精确解和分别对应的一阶、二阶、三阶近似解。结果表明:只有当凸轮转动中心到圆盘中心的距离与圆盘半径加上滚子半径之和的比值较小时,对心直动滚子从动件盘形凸轮机构近似解才接近精确解;比值较大时,近似解和精确解的差别较大。
对心直动滚子;从动件;盘形凸轮机构;Taylor级数;近似解;精确解
盘形凸轮结构简单、加工方便、应用广泛,在凸轮机构中占有相当大的比重,因而对它的研究也更具代表性。其中对心直动滚子从动件盘形凸轮机构的使用较为常见。在该机构中,滚子与凸轮表面线接触,接触应力大,摩擦磨损严重。为了减少磨损,凸轮表面需要进行热处理或化学处理,有时在轮廓表面上固定硬质型材或加一层耐磨材料。
本文仅考虑在理想状态下,并忽略尺寸误差对运动精度的影响等因素,分析比较对心直动滚子从动件盘形凸轮机构精确解与近似解。
1 顶杆的运动方程
1.1 精确表达式
以某对心直动滚子从动件盘形凸轮机构为例,如图1所示,凸轮机构的角速度ω,转角为φ=ωt,滚子半径长r,偏心轮圆盘半径R,凸轮转动中心到偏心轮圆盘中心的距离为OC=e,偏心轮带动顶杆AB沿铅垂直线作往复运动,不难确定顶杆的位移为
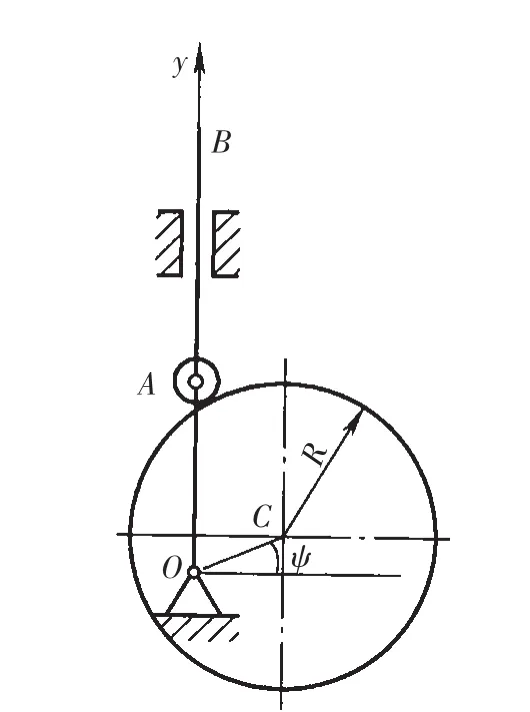
图1 对心直动滚子从动件盘形凸轮机构

式中:s、t——分别为顶杆位移和时间;
λ——凸轮转动中心到圆盘中心的距离与圆盘半径加上滚子半径之和的比值,λ=。
将顶杆的位移方程(1)对时间t取一阶导数,可得到顶杆的速度方程

将顶杆的位移方程(1)对时间t取二阶导数,可得到顶杆的加速度方程

1.2 近似表达式
对方程式(1)中带根号部分用Taylor级数展开如下:
如果保留一阶,顶杆的位移可近似表示为

对(4)分别取一阶导数和二阶导数,则可以得到顶杆的速度和加速度的一阶近似表达式如下
如果保留二阶,顶杆的位移可近似表示为

对(7)分别取一阶导数和二阶导数,则可以得到顶杆的速度和加速度的二阶近似表达式如下
如果保留三阶,顶杆的位移可近似表示为
对(10)分别取一阶导数和二阶导数,则可以得到顶杆的速度和加速度的三阶近似表达式如下
2 数值算例
本文仅考虑在理想状态下,即凸轮保持在较低均匀角速度下转动,并忽略尺寸误差对运动精度的影响等因素。假设凸轮机构的角速度ω=3rad/s,滚子半径长r=10mm,圆盘半径R=40mm,凸轮转动中心到圆盘中心的距离为OC=e=25mm,则此时比值λ=0.5,方程(1)、(4)、(7)、(10)分别为对心直动滚子从动件盘形凸轮机构顶杆位移的精确解和对应的一阶、二阶、三阶近似解,相应可得到顶杆的位移图,如图2所示,顶杆位移的一阶、二阶、三阶近似解均接近精确解;方程(2)、(5)、(8)、(11)分别为对心直动滚子从动件盘形凸轮机构顶杆速度的精确解和对应的一阶、二阶、三阶近似解,如图3所示,顶杆速度的精确解和一阶、二阶、三阶近似解存在一定误差;方程(3)、(6)、(9)、(12)分别为对心直动滚子从动件盘形凸轮机构顶杆加速度的精确解和对应的一阶、二阶、三阶近似解,如图4所示,顶杆速度的精确解和一阶、二阶、三阶近似解存在一定误差,综合体现为图3误差不如图4明显,即此时加速度的精确解与近似解的误差比速度的精确解与近似解的误差明显。
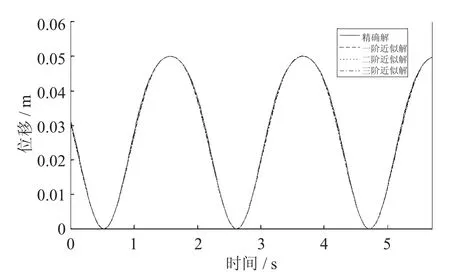
图2 顶杆位移比较(λ=0.5)
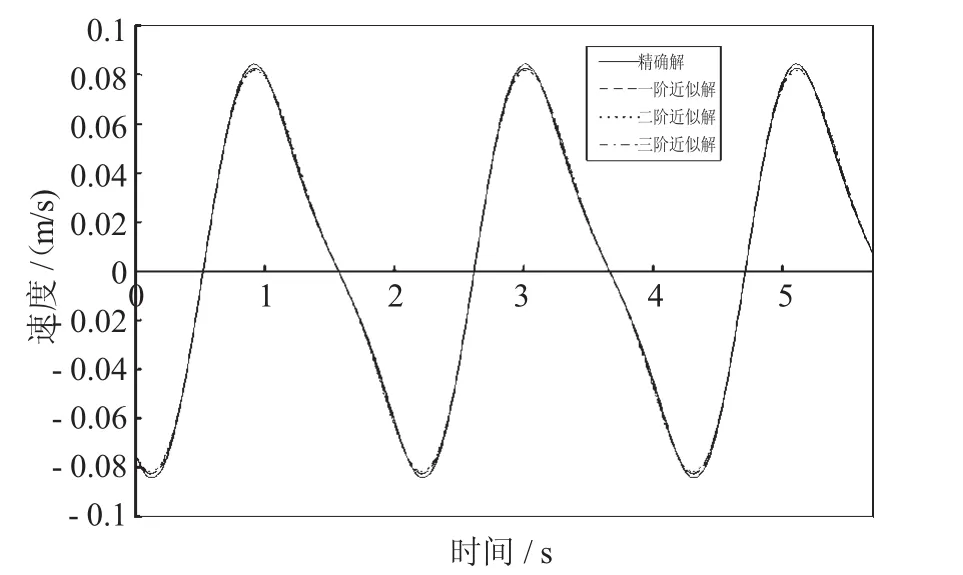
图3 顶杆速度比较(λ=0.5)

图4 顶杆加速度比较(λ=0.5)
如果增大λ,即通过设置轮机构的角速度ω= 3rad/s,滚子半径长r=10mm,圆盘半径R=40mm,凸轮转动中心到圆盘中心的距离为OC=e=40mm,则此时比值λ=0.8。方程(1)、(4)、(7)、(10)分别为对心直动滚子从动件盘形凸轮机构顶杆位移的精确解和对应的一阶、二阶、三阶近似解,相应可得到顶杆的位移图,如图5所示,此时顶杆位移的精确解与保留一阶、二阶、三阶的近似解误差较大,但是三个近似解很接近;方程(2)、(5)、(8)、(11)分别为对心直动滚子从动件盘形凸轮机构顶杆速度的精确解和对应的一阶、二阶、三阶近似解,如图6所示,此时速度的精确解与保留一阶、二阶、三阶的近似解误差较大,同时,一阶近似解和二阶近似解很接近,三阶近似解与精确解误差更大,三阶近似解与一阶近似解和二阶近似解误差较大;方程(3)、(6)、(9)、(12)分别为对心直动滚子从动件盘形凸轮机构顶杆加速度的精确解和对应的一阶、二阶、三阶近似解,如图7所示,加速度的一阶近似解、二阶近似解与精确解误差较大,但一阶近似解、二阶近似解很接近,同样三阶近似解与精确解比较接近,但与一阶近似解、二阶近似解误差较大,此时,滚子从动件盘形凸轮机构顶杆位移、速度、加速度的精确解及其分别对应的一阶、二阶、三阶近似解,误差明显增大。
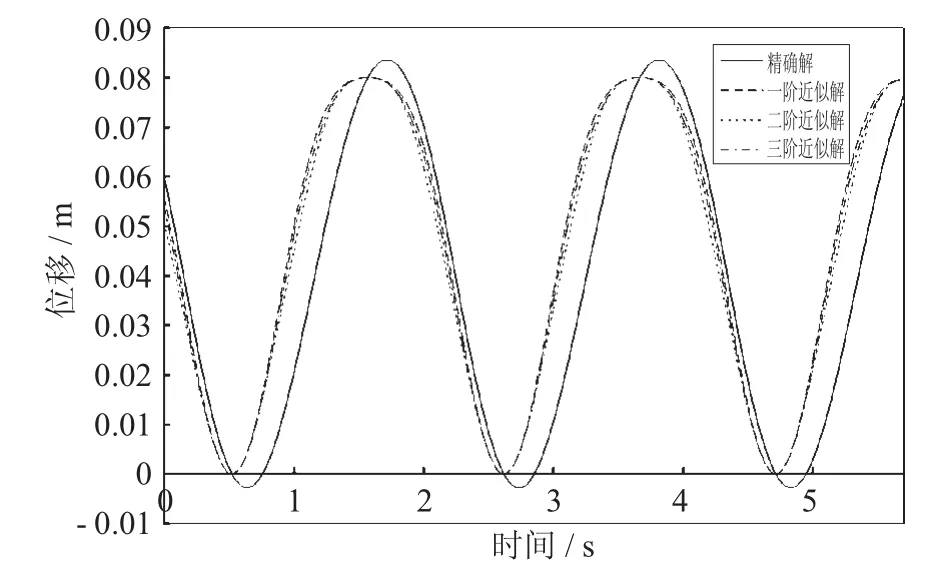
图5 顶杆位移比较(λ=0.8)

图6 顶杆速度比较(λ=0.8)
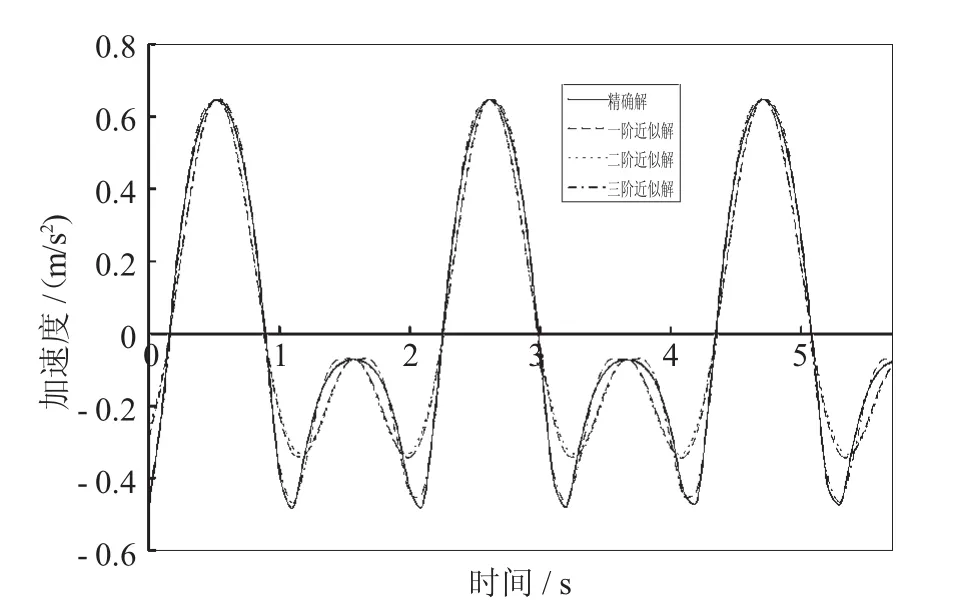
图7 顶杆加速度比较(λ=0.8)

图8 顶杆位移比较(λ=0.2)
如果减小λ,即通过设置轮机构的角速度ω= 3rad/s,滚子半径长r=10mm,圆盘半径R=40mm,凸轮转动中心到圆盘中心的距离为OC=e=10mm,则此时比值λ=0.2。方程(1)、(4)、(7)、(10)分别为对心直动滚子从动件盘形凸轮机构顶杆位移的精确解和对应的一阶、二阶、三阶近似解,相应可得到顶杆的位移图,如图8所示,位移的一阶、二阶、三阶近似解均接近精确解;方程(2)、(5)、(8)、(11)分别为对心直动滚子从动件盘形凸轮机构顶杆速度的精确解和对应的一阶、二阶、三阶近似解,如图9所示,速度的一阶、二阶、三阶近似解与精确解几乎重合;方程(3)、(6)、(9)、(12)分别为对心直动滚子从动件盘形凸轮机构顶杆加速度的精确解和对应的一阶、二阶、三阶近似解,如图10所示,加速度的一阶、二阶、三阶近似解与精确解几乎重合。

图9 顶杆速度比较(λ=0.2)
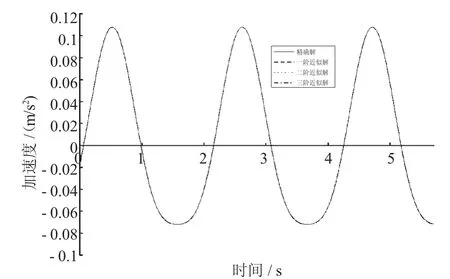
图10 顶杆加速度比较(λ=0.2)
3 结论
通过对对心直动滚子从动件盘形凸轮机构顶杆运动方程的近似解和精确解数值分析和比较,结果表明,只有当凸轮转动中心到圆盘中心的距离与圆盘半径加上滚子半径之和的比值较小时,对心直动滚子从动件盘形凸轮机构近似解才接近精确解,此时,解的阶数越高对精度影响不大;而比值较大时,一阶、二阶、三阶近似解之间误差也在增大,此时,多保留几阶,精确解与近似解误差也加大。所以,在工程上,从对心直动滚子从动件盘形凸轮机构优先选取凸轮转动中心到圆盘中心的距离与圆盘半径加上滚子半径之和的比值较小的尺寸,才会达到预期运动的规律,对凸轮尺寸设计的合理设计提供了依据。
[1]唐国兴,等.理论力学[M].北京:机械工业出版社,2011.
[2]杨可桢,等.机械设计基础[M].北京:高等教育出版社,2006.
[3]王 波,陈立群.匀低速曲柄滑块机构近似解与精确解比较[J].力学与实践,2013,(3).
Comparison between exact and approximate solutions of disk cam mechanism for center-following roller followers
DONG Guanwen,LI Zongyi
(Gansu Mechanical&Electrical Vocational College,Tianshui 741001,Gansu China)
The approximate solution and exact solution of disk cam mechanism ejector rod motion equation for center-following roller followers have been analyzed and compared in the text.The exact expression of motion equation has been derived under ideal status.Byuse of the Taylor series and numerical example,the exact solutions of the displacement,velocity and acceleration expressions for ejector rod have been obtained, as well as respectivecorresponding first order,second order and third order approximate solutions.The results show that the approximate solution is close to the exact solution only when the ratio of the distance from the camrotation centerto the disccenter and sum of disc radius and roller radius roller is small.While the differences between the approximate and exact solutionsare large when the ratio is big.
Disk cam mechanism for center-following roller followers;Taylor series;Approximate solution; Exact solution
TH112.2
A
10.16316/j.issn.1672-0121.2017.02.024
1672-0121(2017)02-0082-04
2016-12-09;
2017-01-25
董冠文(1984-),男,助理讲师,从事模具结构力学教研。
李宗义(1960-),男,教授,从事模具CAD方向教研。
E-mail:gansujidianxueyuan@163.com
猜你喜欢
数学物理学报(2022年2期)2022-04-26
模具技术(2021年5期)2021-10-13
机械工程与自动化(2020年4期)2020-08-25
郑州大学学报(工学版)(2020年3期)2020-08-06
锻造与冲压(2020年13期)2020-07-09
农业装备技术(2020年3期)2020-07-06
机械管理开发(2018年4期)2018-05-18
北京航空航天大学学报(2017年4期)2017-11-23
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
船海工程(2015年4期)2016-01-05
