基于Maxwell的感应式球形电机设计与分析
2017-06-13 09:02张华增陈进华
微特电机 2017年6期
张华增,张 驰,张 杰,陈进华,刘 波
(1.中北大学,太原030051;2.中国科学院宁波材料与技术研究院,宁波315000)
0 引 言
随着自动化工业的发展,机械系统所需要的自由度数量变得越来越多。针对多自由度的机械系统,传统上采用多个单自由度的电机通过复杂的传动装置组合而成,这种多电机及传动装置的组合无疑会大大增加机械系统的体积,同时也使得机械系统的精度降低[1]。
球形电机由于其特殊的转子结构而具有实现多自由度的运动的可能。多自由度电机由于其本身体积小、重量轻等优点而减小了机械系统占有的体积及系统的质量,并且能够提高机械系统的精度及运行效率,降低系统的复杂程度。对于球形电机的研究,多数的研究方向是永磁类型的球形电机,该类型电机通过转子表面内嵌永磁体,在定子绕组的励磁下实现转动。它们之间的区别是永磁体在转子表面的排列方式。然而由于机构的原因,使得球形电机在输出轴上的输出力矩不足,而且球形电机的运动控制较为困难。针对以上的问题,日本工业科技研究所提出了一种6-8面体永磁式球形步进电机[2-7]。该电机采用无铁心线圈作为定子线圈,且按一定排列顺序分布在电机壳体上,这使得电机的控制变得复杂。而感应式电机作为一种最成熟的电机类型,具有控制简单等特点。文献[8]采用了5个定子绕组来实现球形转子在三维空间中的旋转运动,过多的定子使得电机本身的重量加。
本文介绍一种具有3自由度的感应式球形电机,该电机采用3组互相垂直布置的定子绕组来实现电机在三维空间中的运动。然后对该感应式球形电机的结构和工作原理进行了简述,并借助Ansoft/Mawell软件工具对球形电机进行设计优化,验证了球形电机的性能满足设计目标。
1 感应式球形电机的结构及原理
1. 1感应式球形电机的机械结构
如图1所示,该感应式球形电机的结构主要由定子铁心及定子绕组、球形转子、滚珠轴承及外部支架组成。定子由带有齿槽的硅钢薄片叠压而成,定子铁心背面焊接钢板,以便于将定子固定在外部支架上。为保证球形电机的3自由度运动,分别在XOY,YOZ,XOZ平面对称布置两个圆弧形定子,3组定子绕组相互垂直,构成了球形转子在三维空间的旋转运动。此设计在不影响球形电机运动的前提下,节省了定子材料,也减轻了整个电机的重量,同时避免了定子绕组之间的相互干扰。转子由铁磁材料制成,并采用在转子表面镀铜的工艺来增强转子的导电性能及输出转矩。为了保证定子与转子之间的气隙宽度保持不变,转子采用滚动轴承支撑的方式,使球形转子的中心位置保持固定。

图1 球形电机结构示意图
1. 2感应式球形电机的原理
该球形电机的工作原理类似于异步感应电机的工作原理[9]。通过定子产生的旋转磁场与转子形成相对运动,转子切割磁感线产生感应电动势,从而在转子中产生感应电流。转子中的感应电流与磁场相互作用,产生电磁转矩使得转子转动。XOY,YOZ,XOZ 3个平面中的3组定子绕组分别单独控制转子在各个方向上的转动,实现球形电机的3自由度的运动。
给定子绕组通三相交流电,定子绕组产生旋转的磁场,式(1)表示了在旋转磁场下,转子中产生的感应电动势:

式中:B为磁感应强度;L为转子在磁场中的等效长度;V表示旋转磁场与转子的相对速度;与外接激励的频率有关。
式(2)描述了驱动转子转动的力模型。通电导体在磁场中受到安培力作用,安培力驱动转子转动。

式中:B表示磁场的磁感应强度;I表示流过转子的稳定电流值;L表示转子在磁场中的等效长度。与感应电机不同的是,在感应电机中L表示电枢中导线的长度,而在球形电机中,转子为球形,其长度需要等效计算。
2 感应式球形电机数学模型
感应式球形电机属于感应式电机的范畴,其数学模型遵循异步电机的原则[9]。
2. 1球形电机电压方程
假设uA,uB,uC分别表示定子端电压的瞬时值,iA,iB,iC分别表示定子端电流的瞬时值,ua,ub,uc表示转子端电压的瞬时值,ia,ib,ic分别表示转子端电流的瞬时值,因此球形电机的电压方程可以表示:

式中:Rs,Rr分别表示为定子绕组和转子绕组的电阻值;p表示微分算子。
2. 2球形电机电磁转矩方程
根据机电能量的转换原理,球形电机的电磁转矩方程可以表示:

式中:Lm表示电机定转子互感。
3 感应式球形电机Ansoft建模及有限元仿真
3. 1基于Ansoft球形电机建模
按照设计要求,整个球形电机的重量不超过1.7 kg,因此球形转子的设计采用空心球壳的形式以减轻整个电机的重量;该电机转速需要达到5 000 r/min,且具有15 mN·m的负载能力。为保证电气的对称性及提高该球形电机的转速,该电机选用6极36槽的方案,具体设计参数如表1所示。

表1 感应式球形电机设计参数
建立球形电机的模型是分析电机性能的基础。基于Ansoft/Maxwell 2D建立球形电机在1个自由度上的平面模型,电机中主要部件的建立可由User Defined Primitives生成,根据设计参数生成需要的模型[10],如图 2 所示。

图2 球形电机1自由度二维模型
3. 2基于Ansoft球形电机有限元分析
对感应式球形电机二维模型进行有限元分析[11],具体步骤如下:
1)使用User Defined Primitives生成球形电机的主要部件,完成二维模型的建立;
2)对定子、线圈及转子设置材料属性;
3)给球形电机二维模型设定边界属性;
4)添加激励源,并对定子及转子进行网格划分;
5)最后进行分析设置,确定有限元分析步长等。
4 感应式球形电机有限元仿真结果分析
由于球形电机在电气上的对称性,为简化分析计算,选取模型的1/3作为对象分析计算。给定子绕组施加三相电压激励,对球形电机进行磁场分析,得到电机在不同时刻磁通密度云图分布,如图3所示。

图3 不同时刻球形电机磁密云图
4. 1空载条件下电机特性分析
为增加球形电机的输出转矩,采用转子表面镀铜的方法对转子进行处理。随着镀铜厚度的变化,电机的特性也会随之发生变化。在空载条件下,给定电压激励的幅值为23 V,激励源频率为300 Hz,对球形电机转子在不同镀铜厚度条件下的转速特性、转矩特性及损耗特性进行了对比分析。
4.1.1 转速特性
感应式电机转速主要与交流电的频率与极对数有关[8],遵循式(5)。

式中:ns表示电机转速;f1表示交流电频率;p表示极对数;s表示转差率。
转差率s在数值上等于转子铜耗与电磁功率的比值,即:

球形电机在镀铜厚度分别为 0.2 mm,0.3 mm,0.4 mm下的转速曲线,如图4所示。

图4 空载条件下不同镀铜厚度条件下的速度特性
由图4可以得出,随着镀铜厚度的增加,球形电机的转速稳定值会越来越大,且电机转速达到稳定值的时间越短。且在40 ms左右时,不同镀铜厚度条件下的电机速度出现明显的差距。
4.1.2 转矩特性
图5给出了球形电机在镀铜厚度分别为0.2 mm,0.3 mm,0.4 mm 条件下的电磁转矩特性。随着镀铜厚度的增加,电磁转矩的最大值保持不变,这是因为电磁转矩最大值与转子的电阻值无关[8],满足式(8):

随着镀铜厚度的增加,输出电磁转矩达到稳定时所需要的时间变短。当电机转速处于稳定状态时,即100 ms后,电磁转矩值均趋于同一数值,满足式(9)。

式中:TL为负载转矩;dω/d t表示瞬时加速度。在球形电机运行的稳定阶段,瞬时加速度为0,且在空载条件下,即TL=0,故如图5所示,在100 ms之后,电磁转矩的值变为0。

图5 空载条件下不同镀铜厚度条件下的转矩特性
4.1.3 损耗特性
电机的损耗主要包括转子铜耗、铁耗及定子铜耗。
图6给出了球形电机在镀铜厚度分别为0.2 mm,0.3 mm,0.4 mm 条件下的损耗曲线。由图 6可以看出,随着镀铜厚度的增加,电机的损耗会有明显的增加。球形转子表面镀铜厚度为0.4 mm时,电机的损耗最高;而为0.2 mm时,损耗最低。在40 ms时刻处,损耗曲线发生变化,镀铜厚度为0.2 mm时,损耗变得最大;而镀铜厚度为0.4 mm时,损耗反而变得最小。但是,从整体角度来看,依然是镀铜厚度为0.2 mm时,损耗最小。
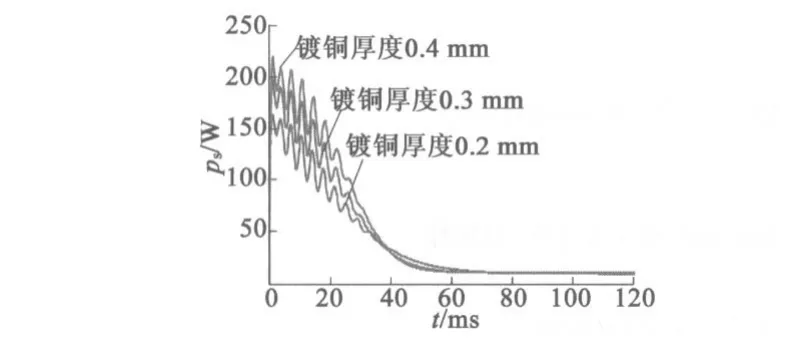
图6 空载条件下不同镀铜厚度条件下的损耗特性
4. 2负载条件下电机特性
图7 、图8和图9给出了该感应式球形电机在15 mN·m负载条件下的不同镀铜厚度时的转速特性、转矩特性及损耗特性。通过图4和图7对比可知,在负载条件下,电机的稳定转速会有所降低,但是能够满足该球形电机对转速的要求,即均大于5 000 r/min。而且,电机转速曲线两者具有相同的趋势。同理,球形电机的转矩特性和损耗特性在负载与空载两种不同条件下具有相同的趋势。
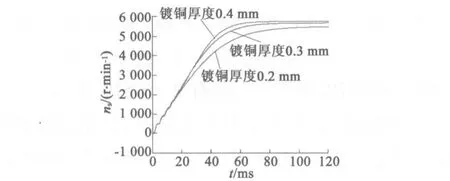
图7 负载条件下不同镀铜厚度条件下的转速特性
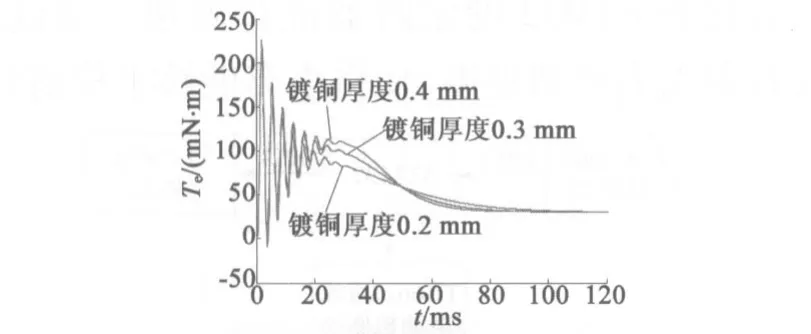
图8 负载条件下不同镀铜厚度条件下的转矩特性
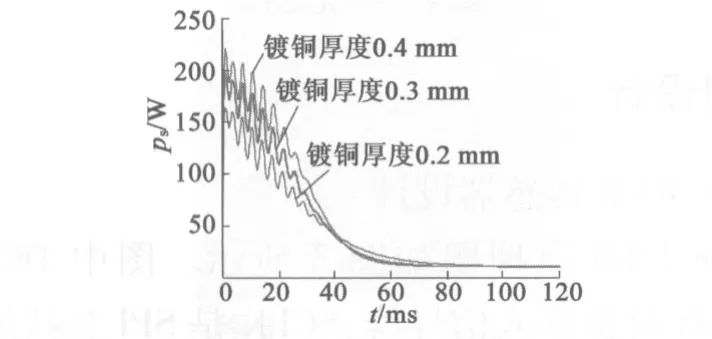
图9 负载条件下不同镀铜厚度条件下的损耗特性
综上所述,在不同的镀铜厚度条件下,随着镀铜厚度的增加,球形电机的转速与电磁转矩都会有相应的提高,但是其损耗也会随之而增大。在满足转速与转矩要求的前提下,损耗越小,其输出功率越大。因此,镀铜厚度为0.2 mm时最适合该感应式球形电机。
5 结 语
本文介绍了一种新型的感应式球形电机,并对其设计原理及设计参数进行了详细的阐述。为增强该球形电机输出转矩的性能,球形电机转子采用了表面镀铜的工艺,并在Maxwell中分析了该感应式球形电机在空载条件下及负载条件下的不同镀铜厚度下的转速特性、转矩特性及损耗特性,最终选择0.2 mm的镀铜厚度,验证了该设计满足要求。
[1] 黄声华,陶醒世,林金铭.三自由度球形电机的发展.电工电能新技术[J].1989(1):6-11.
[2] 李争,王咏涛,葛荣亮,等.永磁球形多自由度电机研究进展综述[J].微电机,2011,44(9):66 -70.
[3] UM Y,YANOT.Characteristic of torque on spherical stepping motor based on hexahedron-octahedron structure[C]//2009 IEEE International Conference on Mechatronics and Automation,2009:170-175.
[4] YANO T.Simulation results of a hexahedron - octahedron based spherical stepping motor[J].Journal of Mechanical Science and Technology,2010,24(1):33 -36.
[5] SON H,LEE K M.Distributed multipole models for design and control of PM actuators and sensors[J].IEEE/ASME Transactions on Mechatronics,2010,13(2):228 -238.
[6] ONER Y,CETIN E,OZTURK H K.Design of a new three-degree of freedom spherical motor for photovoltaic- tracking system[J].Renewable Energy,2009,34(12):2751 -2756.
[7] 李洪凤.Halbach阵列永磁球形电动机三维磁场分析[D].天津:天津大学,2008.
[8] 陈秋月,曾励.基于模糊神经网络逆系统的磁悬浮球形感应电机内模糊控制[D].扬州:扬州大学,2015.
[9] 汤蕴璆.电机学[M].北京:机械工业出版社,2011.
[10] 赵博,张洪亮.Ansoft12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010.
[11] 田燕飞,黄开胜,陈治宇,等.基于Maxwell的外转子无刷直流电动机分析与设计[J].微特电机,2014,42(2):18-20.
猜你喜欢
节能与环保(2022年3期)2022-04-26
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
金属加工(热加工)(2020年9期)2020-11-04
装饰装修天地(2019年18期)2019-10-14
发明与创新·小学生(2018年12期)2018-12-29
农业科技与装备(2018年1期)2018-12-10
商情(2018年46期)2018-11-26