
基于车载激光的纹理重建技术研究
2017-06-15 15:07任晓聪侯岳方乐道
河南科技 2017年7期
任晓聪侯岳方乐道
(1.禹州市泓瑞测绘有限公司,河南禹州 461670;2.河南省测绘工程院,河南郑州 450003)
基于车载激光的纹理重建技术研究
任晓聪1侯岳2方乐道2
(1.禹州市泓瑞测绘有限公司,河南禹州 461670;2.河南省测绘工程院,河南郑州 450003)
本文以车载激光移动测量系统获取点云数据构建的几何模型为空间实体,通过车载LIDAR系统CCD相机的标定与POS系统的数据和各传感器间的相对空间位置信息实现点云和影像的配准,进一步将配准后的影像映射到空间实体上,完成纹理重建。
车载激光;点云数据;影像配准;纹理重建
纹理重建的过程实质上是几个空间的转换:从CCD相机获取的影像数据所在的影像空间到纹理空间到空间实体的模型空间,如图1所示。目前,对于空间平面主要是通过建立纹理空间的特征点和模型空间坐标之间的对应关系,在空间平面的顶点之间进行线性插值来决定空间实体对象表面上其他空间点对应的纹理坐标[1-5]。设分别位于影像空间、纹理空间和模型空间的同名点p′(x,y,1),p(u,v),P(x,y,z),通过函数联系3种空间的变换关系。
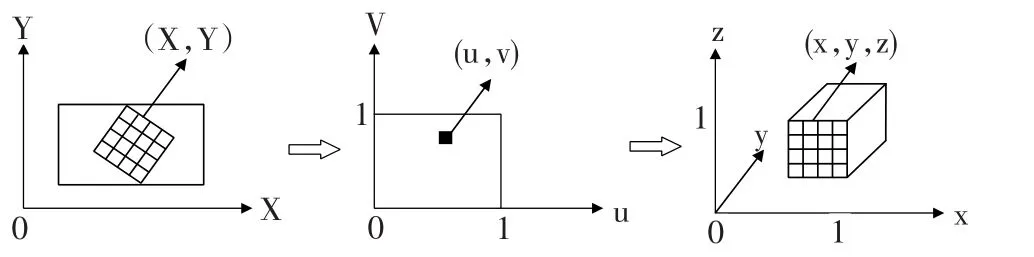
图1 3种空间转换
1 技术流程
1.1 建立影像空间与模型空间的变换
由相机投影矩阵A表示,设P′=f1(P),f1(*)表示的是影像空间与模型空间的变换函数,投影矩阵可以利用视线的方向、视口的大小及目前视点的位置计算得到。其中,A=K[RT-RT-t]。R表示旋转变换,由3个姿态角的三角函数决定;t为平移量;K为相机的检校矩阵,其影响因子一般为相机的内外方位元素。
1.2 建立纹理空间至模型空间的变换
P=f2(p),则f2(*)表示影像中的像素点从纹理空间至模型空间的变换函数,该过程是一个二次变换的过程,中间需要引入一个中间曲面,这一过程可以表示为:第一步,将纹理图像映射到一个简单的参数化曲面上如平面、球面等,f(u,v)→f′(x′,y′,z′),这一变换称为S-映射,每一种中间曲面的映射效果不同,可以根据需要映射的三维模型的形状不同采用不同中间曲面,常用的有平面、球面、圆柱面和立方体面;第二步,中介曲面映射到目标实体表面f′(x′,y′,z′)→O(x,y,z),这一变换称之为O-映射,通常有以下4种投影方式,即反射光线法、表面法向量法、景物中心法、中介曲面法向量[6];将这两步变换用一二维矩阵M表示。
引入相机投影矩阵A,则影像空间到纹理空间的变换函数为:

图2展现的是这三个空间坐标变换过程。

图2 空间坐标转换过程
2 关键技术
本文所用的车载激光移动测量系统的影像获取设备虽然也为全景影像,考虑到某一栋建筑物的几何建模及纹理映射的完整性,本文将全景影像按照单个CCD相机生成单张影像,并利用车载系统的POS数据和各个传感器间的固定几何关系建立影像与激光点云的一一对应关系,从而得到激光点云与单片影像的配准。
对于地面某一个目标点,其所对应的像点平面坐标和同名点云的扫描仪坐标的关系流程为:像点a平面坐标(x,y)→像点空间坐标(x,y,-f)→像空辅坐标系(u,v,w)→扫描仪坐标系(X,Y,Z),这里的转换只需要像点空间坐标到像空辅坐标中的3个旋转,2个坐标系的原点重合,坐标轴的旋转既得到3个旋转角ψ、ω、k;而像空辅坐标系的w轴与扫描仪坐标的z轴重合,所以这两个坐标系的转换只需要有一个平移向量即可。因此,对于任意一目标点,其像点的空间坐标与扫描仪坐标间的映射关系为:

其中,[x y-f]T为像点的像空间坐标,[X Y Z]T为激光点云在扫描仪坐标下的坐标,R和C分别表示空间坐标系与扫描仪坐标系变换的矩阵和变量。因此,只要能够得到旋转矩阵和平移变量即可实现激光点云和影像之间的实时配准。设像点a在像空间坐标中的坐标表示(x,y,-f),在像空间辅助坐标系中的坐标表示(u,v,w),则两者之间的坐标变换可通过以下式子表示:

像空间辅助坐标系的w轴是铅垂的,所以像空间辅助坐标系S-uvw与点云的扫描仪坐标系D-XYZ之间的坐标轴是平行的,所以存在如下的关系式:

其中,(XS,YS,ZS)为投影中心S的大地坐标,(X,Y,Z)为地面点A的扫描仪坐标,可知投影中心S和像点a及地面点A在同一条线上,根据相似三角形原理可得上述式子。
投影中心S的大地坐标可根据车载测量系统中的定位系统获取,利用CCD相机获取的若干个像点和同名激光点云的扫描坐标即可计算出式(2)中的旋转矩阵R和平移变量C,进而可以得到激光点云数据和CCD影像的配准。
对于纠正过CCD影像形成正射图像就直接可以用来进行三维建模,直接建模的方式有很多种,成熟的软件也很多,可以直接进行应用。在这里选择用建筑物模型构建中最常用的软件进行建模,首先需要将纠正后的影像数据导入软件材质库中,直接进行渲染得到几何模型和纹理模型的重建,形成三维可视化模型[7]。
3 结论
利用车载激光扫描仪和CCD相机同步获取的数据,结算出单片影像与扫描仪之间的旋转矩阵和平移变量,得到点云与影像的配准。图3为矫正配准后的影像数据。
[1]王蒙.基于大规模点云数据的三维重建和纹理映射研究[D].南昌:南昌大学,2014.
[2]赵煦.基于地面激光扫描点云数据的三维重建方法研究[D].武汉:武汉大学,2010.
[3]周杰.基于激光点云数据的三维模型重构关键技术研究[D].长沙:国防科学技术大学,2014.
[4]吴侗.基于点云多平面检测的三维重建关键技术研究[D].南昌:南昌航空大学,2013.
[5]吴胜浩,钟若飞.基于彩色激光点云的车载线阵CCD纹理重建[A]//全国激光雷达对地观测高级学术研讨会,2010.
[6]基毛杰,张西童,吴珍珍.基于三维激光扫描技术的景观石重建技术[J].黑龙江工程学院学报,2016(2):12-15.
[7]李乐庆.基于点云的模型重建与绘制技术研究[D].西安:西北大学,2009.
Research on Texture Reconstruction Based on Vehicle Borne Laser
Ren Xiaocong1Hou Yue2Fang Ledao2
(1.Yuzhou Hongrui Mapping Ltd.,Yuzhou Henan 461670;2.Surveying&Mapping Engineering Institute of Henan Province,Zhengzhou Henan 450003)
In this paper,the geometric model of the point cloud data was obtained by using the laser motion measurement system,through the calibration and relative location information data of the POS system and the realization of each sensor between point cloud and image vehicle LIDAR system CCD camera image registration,the registration image was mapped to the spatial entity,and the texture reconstruction was completed.
vehicle borne laser;point cloud data;image registration;texture reconstruction
TP391.41
A
1003-5168(2017)04-0022-02
2017-03-08
任晓聪(1985-),男,本科,工程师,研究方向:测绘工程、gis系统研发。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
汽车实用技术(2022年10期)2022-06-09
软件(2020年3期)2020-04-20
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
模具制造(2019年3期)2019-06-06
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
中国公共安全(2017年11期)2017-02-06
Coco薇(2015年5期)2016-03-29
