
基于改进的soble算子和zernike矩遥感图像边缘检测
2017-06-21 12:04陈竹安胡志峰杨希鹏
湖北民族大学学报(自然科学版) 2017年2期
陈竹安,胡志峰,杨希鹏
(1.东华理工大学 测绘工程学院,南昌 330013;2.流域生态与地理环境监测国家测绘地理信息局重点实验室,南昌 330013;3.江西省数字国土重点实验室,南昌 330013;4.江西生态文明建设制度研究中心,南昌 330013)
基于改进的soble算子和zernike矩遥感图像边缘检测
陈竹安1,2,3,4,胡志峰1,杨希鹏1
(1.东华理工大学 测绘工程学院,南昌 330013;2.流域生态与地理环境监测国家测绘地理信息局重点实验室,南昌 330013;3.江西省数字国土重点实验室,南昌 330013;4.江西生态文明建设制度研究中心,南昌 330013)
为了实现和提高对于遥感图像边缘信息和轮廓的提取,在传统经典的边缘检测soble算子的基础之上提出改进soble算子结合zernike不变矩的边缘检测方法.首先通过对应的滤波对于遥感图像的预处理,接着利用改进的soble进行边缘点存在的确定和计算.最后利用7*7的zernike矩对于图像边缘更加精确的定位及处理.通过实验可以得到,此方法相对于传统的经典边缘检测算法相比较定位更加准确,边缘检测轮廓和信息更加明显.
改进的soble算子;zernike矩;边缘检测
图形图像的边缘检测技术在指纹识别、人脸识别、地面人工目标和自然景观如机场、山体、洪水淹没区域的识别中有着广泛的用途,边缘检测技术也逐渐的得到关注和取得一些比较好的研究成果.边缘包含了丰富的遗漏信息(如阶跃性质、方向、形状等),是图像识别中获取图像特征的重要属性.通过边缘检测,勾画出目标物体的轮廓,从而达到目标识别的目的[1].测绘及地理信息系统领域遥感图像包含许多的信息,在处理过程中难免会有遗漏和模糊,因此在处理遥感图像前也必须进行边缘检测步骤来提取更多的信息来丰富图像的质量.
由于sobel算子对噪声具有平滑作用且提供了较为精确的边缘方向信息,但是对图像边缘的定位精度不是很高所以当对图像检测精度要求不是很高时是一种较为常用的边缘检测算子.zernike矩不仅对于图像边缘方向有精确地定位,而且还能更加详描绘边缘信息.本文通过改进后的soble算子以及结合图像学中的zernike矩可以取得更加精确地边缘检测效果.
1 图像边缘检测算法
1.1 传统的soble算子基本原理
sobel边缘检测算子是做成加权平均再微分然后求梯度的一个检
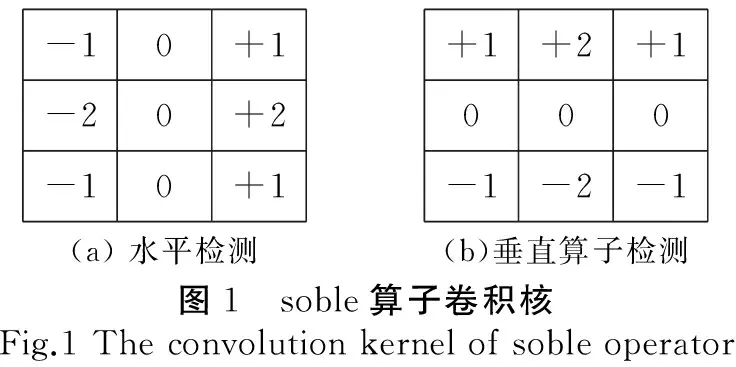
-10+1-20+2-10+1+1+2+1000-1-2-1(a)水平检测(b)垂直算子检测图1 soble算子卷积核Fig.1Theconvolutionkernelofsobleoperator
测过程.图1是两个卷积核形成了sobel边缘检测算子,图中的每个点都用这两个核做卷积,其中的一个核对垂直边缘影响最大,另外一个对水平边缘影响最大[2].边缘检测算子的中心与中心像素对应进行卷积运算.两个卷积核的最大值作为该点的新的像素值.运算结果是一副边缘幅度图像.传统soble算子的卷积因子如图1所示.
1.2 改进的soble算子
传统的3*3 soble边缘检测算子仅限于在水平和竖直两个方向进行图像的边缘的检测,存在着一定的局限性.为了提高soble算子对于图像的处理能力,减小误差的影响,增强边缘精度.因此有人提出了八方向的3*3模板以及5*5的模板.3*3八方向模板分别是从0°、45°、90°、135°、180°、225°、270°、335°来进行检测如图2所示.
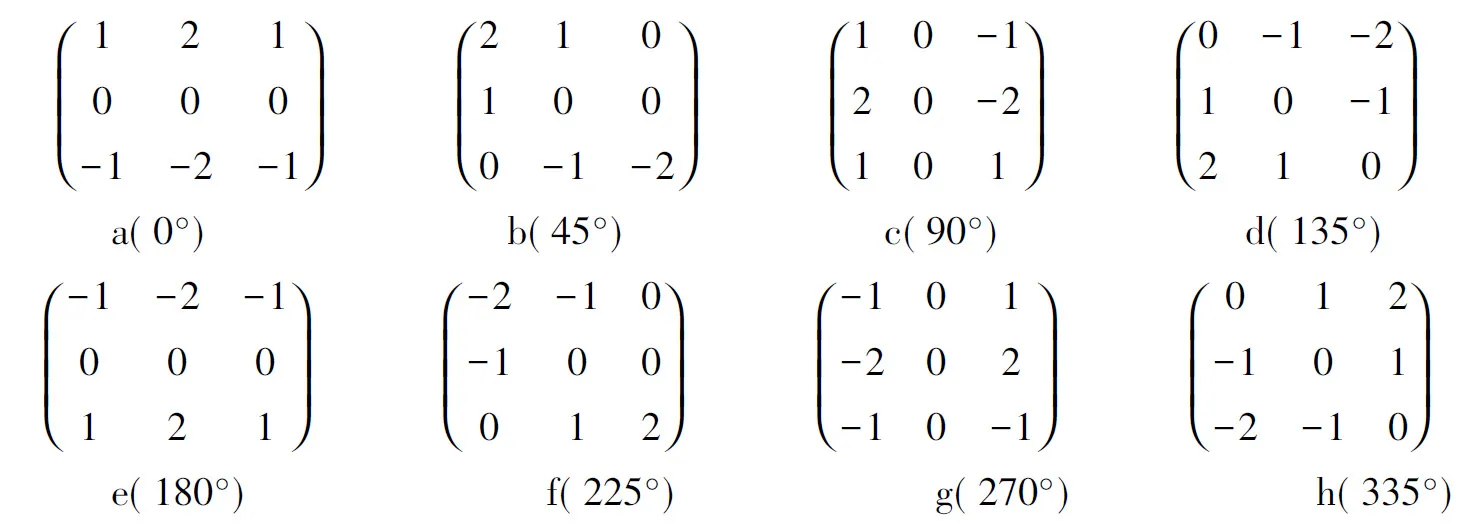
图2 扩展soble算子3*3八方向卷积模板
Fig.2 Extended soble operator 3*3 eight-direction convolution templates
在提出扩展八方向soble算子的3*3方向后.为了进一步调整soble算子的准确性,文献提出了5*5的模板则是在0°、22.5°、45°、67.5°、90°、112.5°、135°、175.5°八方向来进行检测的[2].其中主要的0°、90°两个卷积模板如图3所示.
1.3 本文采用的soble算子
传统soble算子与常规 soble扩展算子一般为3*3的模板,但是,实际边缘提却中,经常先平滑再求梯度以减少噪声影响,这时的算子就可以是5*5甚至更大了.对于传统的3*3的算子可以分解为如图4所示的小模板卷积的运算得Gx和Gy两个模板(*表示卷积).
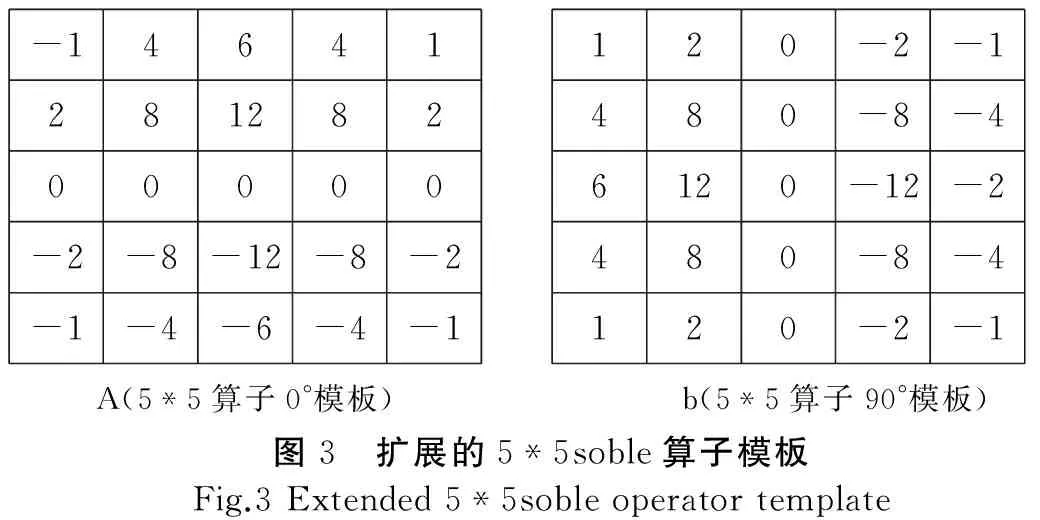
-1464128128200000-2-8-12-8-2-1-4-6-4-1120-2-1480-8-46120-12-2480-8-4120-2-1A(5*5算子0°模板)b(5*5算子90°模板)图3 扩展的5*5soble算子模板Fig.3Extended5*5sobleoperatortemplate
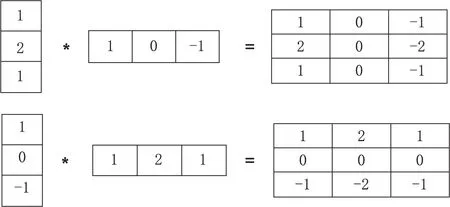
图4 模板卷积方法Fig.4 Template convolution method
图4是利用卷积的基本性质分解成相应的两个小木板相互卷积.在相关的一些的教科书上会注意到介绍soble具有平滑和微分的作用,通过观察分解的小模板[10-1]和本身的转置为差分,而对应的[1 2 1]则是一个标准的平滑算子.
1.4 各方向模板的确定
为了能够更精确地描述出图像边缘点,减少噪声对检测成果的影响,增强算子的抗噪能力[3].本文提出改进后7*7模板的soble边缘检测算子,通过杨辉三角形相关的理论推导出7*7的平滑和差分(以x方向为例).
平滑函数为:
(1)
式(1)中的表示:Tw为离散平滑算子的系数,S是对应窗口的大小,w是以x轴方向窗口的对应位置.得出对应的窗口以及相应的平滑系数如图5所示.
完成平滑函数推导依据小模板利用差分函数解析另外一个7*7模板的分解模板.
差分函数:
ZW=Ppascal(w,s-2)-Ppascal(w-1,s-2)
(2)
(3)
通过式(2)和式(3)以及对应的杨辉三角得出差分系数如图6所示.


通过对于3*3算子的拆分得出7*7算子的拆分模板,在给出窗口的差分和平滑系数中,构成最佳soble算子模板的窗口数一般为S=3,5,7,本文选取S=7作为模板数建立7*7的soble算子模板.通过卷积运算得出0°、90°的模板.再根据旋转(即以0度方向模板作为标准)推导出其他方向的模板算子.与5*5算子所选的不同,本文选择的依旧是45°、90°、135°、180°、225°、270°、315°方向模板算子[4].因为这8个方向更具有稳定性.
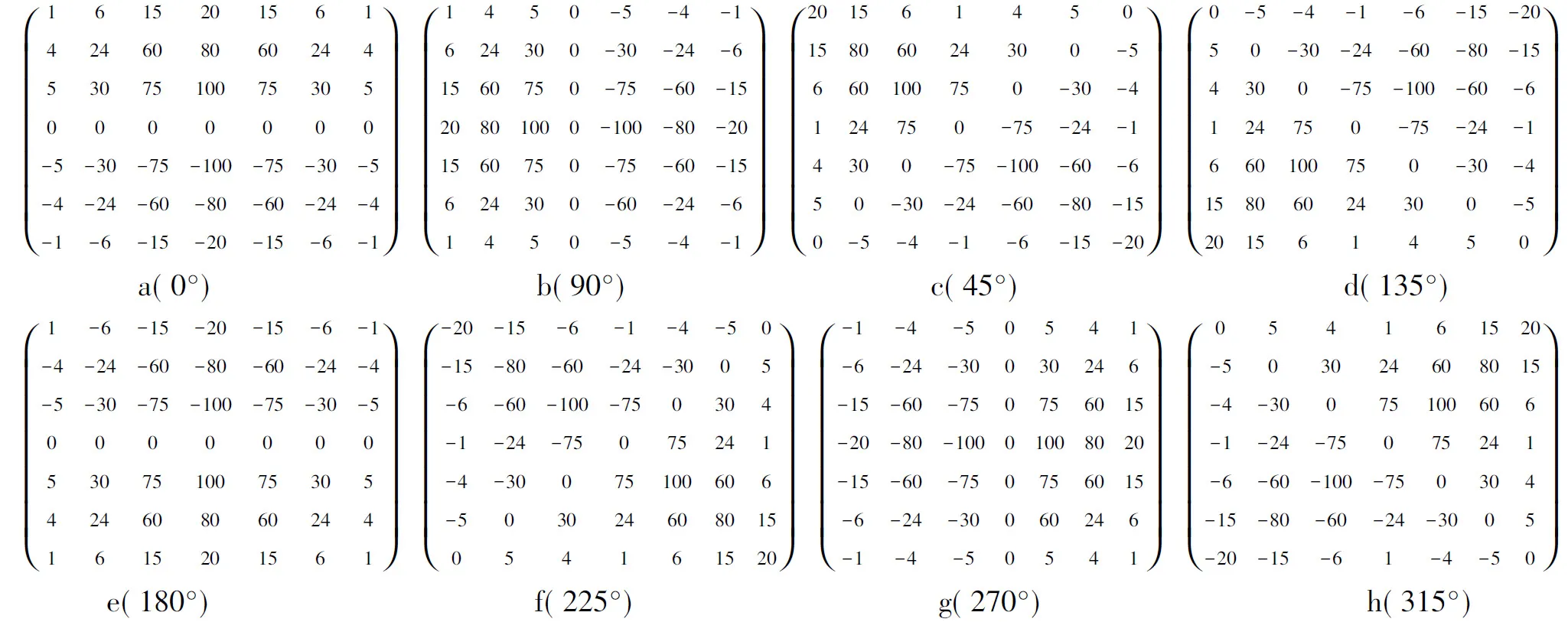
图7 7*7八方向模板
Fig.7 7*7 eight-direction templates
2 zernike矩边缘检测
2.1 zernike矩的基本原理
矩特征主要表征了图像区域的几何特性,又称为几何矩,其具有旋转、平移、尺度等特性的不变特征,因此又称其为不变矩[5].在图像的模式识别中起到很重要的作用.zernike 矩的 阶多项式 的对应方程如下:
Vcp(x,y)=Vcp(r,θ)=Rcp(r)eipθ
(4)
式中:c,p均为整数且满足条件c-|p|的结果为非负的偶数.r为极径,c表示原点到点(x,y)的矢量长度;θ表示矢量与轴逆时针方向的夹角.I作为虚数单位,其中Rcp是径项多项式.
在离散的图像条件下,zernike矩可以定义为:
(5)

(6)
通过式(6)可以得出,在旋转后的图像发生一定的相位角变化时,zernike矩的模并没有相应的变化,而是和旋转前的模值是一样的.从而可以得出zernike矩具有旋转不变性特征.利用zernike 矩的旋转不变性,将图像进行旋转后,可以计算出边缘检测需要的参数,进而实现对边缘的精确提取.
2.2 zernike边缘检测的原理
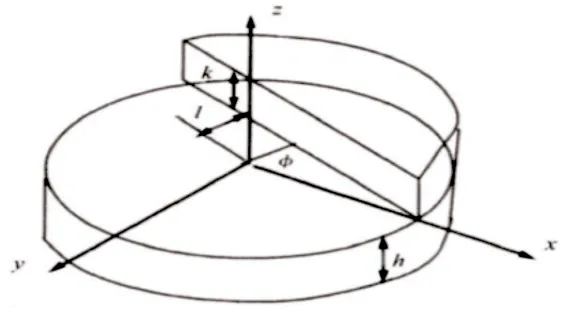
图8 亚像素边缘阶跃模型Fig.8 Subpixel Step Edge Model
zernike矩是利用相关的公式来计算每一个像素点的4个参数,从而判断该点是否为边缘点[6-8].其中像素点的4个参数分别为:K表示灰度差,h表示背景灰度,i表示原点到边缘的距离,φ表示中间点到边缘垂线与x轴的夹角,其中各参数具体物理意义如图8所示.
为了检测遥感图像上的是否为边缘点,就必须求出相应的4参数的值,从而进行判断.在计算zernike的4个参数的时候需要得到相应的矩模板.本文采用的是7*7的zernike矩[9-11],其中A11、A00、A20是通过改进soble算子检测的边缘点通过卷积计算求出的zernike模板.求出了对应的模板矩就可以运用下面的各式求解参数的值.
(7)
(8)
(9)
(10)
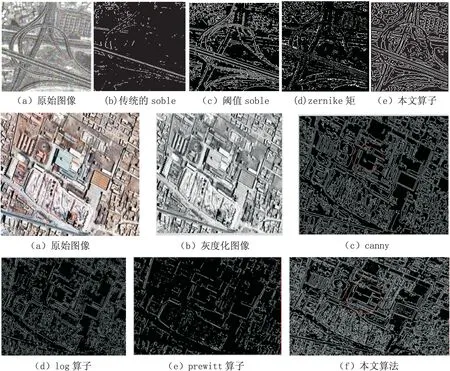
求出对应的参数,其中L,h作为判断边缘点的依据,在判断边缘点时设置对应的阈值S1和S2.当求解的参数满足h>S1,q且L 2.3 基于zernike矩的高斯平滑加权滤波 3*3soble算子比Robert,prewitt等其它的算子有更好的抗躁能力[12],改进后的7*7算子对于图像噪声起到了更好的作用,但是获取的遥感图像在使用任何一种边缘算子的时候是不可能完全的适应噪声的影响,只是存在抗躁性的差别而已.而且在文献中也证明传统的soble算子只抑制较低的噪声影响[13-14],对于较高的噪声效果反而不好.zernike能够很完整的描述图像的结构特征以及精确定位,所以本文结合zernike矩的高斯加权滤波对于图像像素点加权计算度量来进行平滑处理.在处理过程中本文方法能够比较好的抑制图像的滤波弱化保持完整的边缘信息[14]. 取遥感图像f(x,y)中的第m个像素点坐标记(xm,ym)为通过高斯函数与原图形的卷积得到平滑图像计算公式,利用这个公式对周围的像素点进行灰度值加权的计算. I(x,y)=G(x,y)*f(x,y) (11) (12) 其中:T(m)表示以像素点m为中心的大小为ω*ω图像邻域窗口.其中权值ω(i,j)通过二维高斯方程(式13)在窗口邻域中离散得到对应的值.权值ω(i,j)的数值大小与像素点i,j之间的空间距离有关系,权值ω(i,j)与像素点与空间中心的距离成反比. 根据理推导出的zernike高斯加权滤波权值计算公式可以表示为: (13) 其中:c(m)为归一化因子,Zk(m)和Zk(j)表示像素点m和像素点j局部窗口求解的zernike矩向量,σ表示的是平滑的程度: (14) zernike矩高斯加权滤波主要是对于图像进行平滑的预处理,为后面的边缘检测图像做出铺垫的效果.通过实验得出不同的效果图.分别对加噪声的原始图像进行处理,传统的高斯滤波明显处理后得到的图像变得模糊而且展现出来的遥感图像效果边缘信息也比较难以分辨[7],通过本文的方法,可以看出图像的平滑度及对应的清晰度明显增强,周围的信息边角能够清楚地捕捉和辨别. 图9 图像噪声处理Fig.9 Image noise processing 对于图像的预处理,zernike矩高斯加权平滑滤波效果明显高于传统的高斯滤波.对于噪声也能起到一定的处理作用. 3.1 实验分析 本文在传统图形图像学边缘检测算子的基础上,提出了改进soble算子结合zernike矩的遥感图像边缘检测方法.在此方法的运用中必须先对遥感图像进行预处理,传统的的单一的soble算子便于你检测的步骤如图10所示.本文算法步骤如图11所示. 3.2 实验结论 本文选用的遥感图像处理是基于改进的soble算子与zernike相结合的一种的遥感图像边缘检测的处理方法.为了验证实验的结论以及是否能与理想状态检测的图像符合,运用Matlab来对于方法的实现及检验. 传统的soble算子在定位和检测相对于比较粗糙[15].对于图像的地物边缘检测也缺少.当加入阈值和提高算子的模板后边缘检测和定位得到了更大的提高,但是检测的图像出现了更多的伪边缘.zernike矩边缘检测图像边缘信息较明显.本文算法在处理后,图像的边缘信息较好,定位提高.但是出现了一些不足,有些部分的边缘连接性存在缺陷.但是总体来 说也有比较好的改善. 图12 本文算法检测结果Fig.12 The test results of the algorithm proposed in this paper 随着遥感技术的加速发展和日益成熟,通过遥感技术获取的遥感影像在国民的工作中的重要性越来越大,而遥感影像所呈现出的信息要素更是必不可少的.基于能检测出更多的地物信息的基础上,本文运用改进的soble算子结合zernike矩的方法通过检测出地物边界来判断是否存在信息的缺失,从而避免遥感影像信息的遗漏.此方法在应用方面对于遥感图像的质量等其它因素存在依赖,所以也存在一定局限性. [1] 罗敏,王琰.一种黑片图像亚像素边缘检测方法[J].沈阳理工大学学报,2010,29(2):77-81. [2] 谭媛,黄辉先,徐建闽,等.基于改进Sobel算子的遥感图像道路边缘检测方法[J].国土资源遥感,2016(3):7-11. [3] 王珂,肖鹏峰,冯学智,等.基于改进二维离散希尔伯特变换的图像边缘检测方法[J].测绘学报,2012,41(3):421-427,433. [4] 邹福辉,李忠科.图像边缘检测算法的对比分析[J].计算机应用,2008(S1):215-216,219. [5] 齐英剑,池娟,张彬.基于Zernike矩亚像素边缘检测的改进算法[J].西安邮电学院学报,2010,15(5):75-78. [6] 梁若飞,杨风暴,王毅敏,等.一种基于块模糊增强的玉米田遥感图像边缘检测方法[J].影像科学与光化学,2016(2):190-197. [7] 蒲国林,邱玉辉.基于双搜索蜂群算法的四元数彩色遥感图像边缘检测[J].计算机科学,2016(7):310-313. [8] 罗敏,王琰.一种利用Roberts-Zernike矩的亚像素边缘检测方法[J].计算机工程与应用,2011(5):169-171. [9] 徐兰声.基于NSCT和边缘检测的遥感图像去噪[J].激光杂志,2016(1):95-98. [10] 徐腊梅,易春菊.灰色系统理论在图像边缘检测中的应用研究[J]. 武汉大学学报(信息科学版),2012,37(8):929-931. [11] 赵好好,肖鹏峰,冯学智.基于频谱分析的高分辨率遥感图像边缘特征检测研究[J].遥感信息,2013(6):96-101,115. [12] 孙根云,张爱竹,王振杰.基于数据场模型的多光谱图像边缘检测[J].东南大学学报(自然科学版),2013,43(S1):77-80. [13] 胡建平,佟薪,谢琪,等.基于Zernike矩的改进LoG边缘检测方法[J].山西大学学报(自然科学版),2016,39(3):371-377. [14] 郑英娟,张有会,王志巍,等.基于八方向Sobel算子的边缘检测算法[J].计算机科学,2013(S2):354-356. [15] 刘剑飞,左小清,吴俐民,等.结合LOG算子和大津法的遥感影像边缘检测方法[J].测绘科学,2015(1):107-109. 责任编辑:高 山 Edge Detection of Remote Sensing Image Based on Improved Soble Operator and Zernike Moment CHEN Zhu′an1,2,3,4,HU Zhifeng1,YANG Xipeng1 (1. Faculty of Geomatics,East China University of Technology,Nanchang 330013,China;2. Key Laboratory of Watershed Ecology and Geographical Environment Monitoring, NASG, Nanchang 330013,China;3.Jiangxi Province Key Laboratory of Digital Land,Nanchang 330013,China ;4.Jiangxi System Research Center of Ecological Civilization Construction, Nanchang 330013, China) To implement and improve the remote sensing image edge information and the extraction of contour,we propose the traditional classical edge detection soble operator on the basis of improving soble operator edge detection method combined with zernike moment invariants.And then the improved soble is used for calculation and determination of marginal existence.Finally,7*7 zernike moment is used for positioning and processing the image edge more precisely.The experimental result shows that this method is can position more accurately and the outline of edge detection and information are more obvious,compared with the traditional classical edge detection algorithm. improved soble operator;zernike moment;edge detection 2017-03-21. 国家自然科学基金项目(41261041);江西省高校人文社会科学课题(GL1501);江西省自然科学基金项目(20132BAB201049);流域生态与地理环境监测国家测绘地理信息局重点实验室资助课题(WE2016018) 陈竹安(1978-),男,硕士,副教授,主要从事测绘技术、土地信息技术、遥感数据处理的研究. 1008-8423(2017)02-0229-06 10.13501/j.cnki.42-1569/n.2017.06.027 TS210.1 A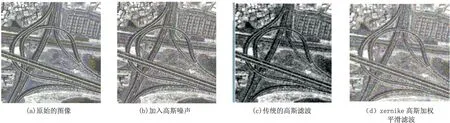
3 实验分析及结论

4 结束语
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
现代电子技术(2021年1期)2021-01-17
应用数学(2020年2期)2020-06-24
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
通信产业报(2016年44期)2017-03-13
雕塑(1999年2期)1999-06-28
