
分体式电缆隧道检测机器人的移动结构研究
2017-06-23 13:27杨华夏
自动化仪表 2017年6期
冯 凌,杨华夏,魏 东
(国网重庆市电力公司电力科学研究院,重庆 401123)
分体式电缆隧道检测机器人的移动结构研究
冯 凌,杨华夏,魏 东
(国网重庆市电力公司电力科学研究院,重庆 401123)
随着城市电缆隧道的不断增加,为确保电缆隧道内环境检测和电缆的安全运行,对电缆隧道检测机器人进行研究具有重要意义,而目前国内外对于电缆隧道检测机器人的研究还处于初期发展阶段。介绍了电缆隧道检测机器人的现状,为采集电缆隧道内部环境图像、温度、有毒气体等信息,需要开发适应复杂环境的机器人移动结构。通过对电缆隧道环境类似的管道机器人移动结构现状分析与综合比较,将履带、轮式、多节机器人移动结构作为设计的重点参考对象。通过进一步分析履带、轮式、多节机器人移动结构的特点,提出了多节分体式机器人的研究思路,并设计了分体式机器人移动结构。通过机器人运动分析,验证了该移动结构的优越性。基于分体式电缆隧道检测机器人移动结构研究,为后续电缆隧道检测机器人的研究提供了有益借鉴和参考。
机器人; 电缆隧道; 传感器; 通信; 环境监测; 输油管道; 管道检测
0 引言
随着经济的发展,城市用电量不断攀升,铺设的输电线路也越来越多。市区外电缆敷设以架空输电线路为主,而市区内则采用直埋、电缆隧道以及排管等方式[1]。为了合理规划城市布局,保证人员和设施的安全,电缆隧道的敷设方式越来越受到重视。为实现电缆隧道内部环境的检测和确保电缆的安全运行,研究电缆隧道检测机器人具有积极意义。
电缆隧道是容纳大量敷设在电缆支架上电缆的走廊或隧道式构筑物。由于隧道内部可能存在可燃性、有毒性气体,会对人工作业造成危害;当隧道内电缆发生故障时,容易引起爆炸、火灾等异常情况,会产生大量浓烟和有毒气体,既腐蚀电气设备,又对人体有害。此外,电缆隧道内因诸多原因引起的积水现象也给电缆的长时间运行带来了极大的安全隐患[2]。
目前,电缆隧道的检测主要采用人工方式[3],国内外仍缺乏对电缆隧道检测机器人的有关研究。在分析现有少量的电缆隧道机器人和工作环境相近的管道机器人移动结构的基础上,提出一种适合电缆隧道环境的机器人移动结构。
1 电缆隧道检测机器人现状分析
电缆隧道检测机器人是管道检测机器人的一种。由于检测对象繁多,需要搭载多种传感器设备。电缆隧道检测机器人需要对隧道内部的工作环境进行图像采集,对温度和有毒有害气体(如CO、CO2、CH4、SO2等)浓度进行检测,并将采集到的实时信息传送到地面处理中心[4]。
基于电缆隧道复杂的环境和种类繁多的检测对象,电缆隧道检测机器人需要采用独特的机械结构设计。管道机器人移动结构分类如图1所示,包括流体压力式、轮式、爬行式、弹性杆式、脚式、蠕动式等[5]。本文主要针对比较接近电缆隧道的工作环境,对管道机器人移动结构进行分类和研究。

图1 管道机器人移动结构分类图
2 电缆隧道检测机器人移动结构分析
由于国内外对电缆隧道检测机器人的研究比较少,而且电缆隧道可以看作管道的一种特殊环境,因此可以参考现有管道机器人的设计方案,解决电缆隧道检测机器人面临的技术难题。按照管道机器人的工作环境进行分类,能够更好地适应电缆隧道环境的特殊性;工作环境主要可分为输油管道、燃气管道、排水管道、空调风管、油烟管道等[6]。下面在分析各种管道机器人的基础上探讨解决方案。
2.1 管道检测和维护机器人
2.1.1 输油管道检测和维护机器人
输油管道可实现汽油、柴油、煤油等成品油的长距离输送,目前正向大口径、高压力的大型管道发展。从20世纪50年代开始,为了实现长距离输油管道运输、自动检测及维护,美、法、英、日等国着手研制管道检测机器人。典型的成果是无动力管道检测和维护设备[7],该设备外径略大于管道直径,将其压入管道后,由设备首尾两端管内流体形成的压差提供动力,克服管壁与活塞间的摩擦力向前运动。
无动力管道检测和维护设备是为特定管道设计的,行走距离远且不必拖缆作业;但其无法大范围变径管道,且无自主行走能力,在管道内只能单向运动,不能适应管径变化,运动速度不易控制,所以并不适合电缆隧道的设计要求。
2.1.2 燃气管道检测和维护机器人
燃气管道可将煤气、天然气等燃气输送给工业企业、公共建筑和居民用户使用。燃气管机器人诞生于20世纪40年代,到20世纪90年代取得较快发展。为了适应不同直径管道的检测,燃气管道机器人需具备管径适应调整机构,主要包括两个方面[8]:在不同直径的管道中能张开或收缩,改变机器人的外径尺寸,使机器人能在各种直径的管道中行走作业;可以提供附加正压力,增加机器人的驱动轮与管道内壁间的压力,改善机器人的牵引性能,增加管内移动检测距离。
燃气管道机器人的移动结构主要采用多节方式或者磁性内外轮方式,能有效通过T型或90°弯管,行动方便;但对管壁材料有依赖性或对管道半径有局限。其中多节结构的优异性可以为电缆隧道检测机器人提供参考。
2.1.3 排水管道检测和维护机器人
排水管道是汇集和排放污水、废水和雨水的管渠。20世纪80年代,欧美国家已经研制出具有实用价值的排水管道机器人。排水管道机器人以轮式为主[9],可以在有淤泥和大量积水的环境下工作,能够在管道内自由行走,可为电缆隧道检测机器人的移动结构提供有效参考。
2.2 管道清洁机器人
2.2.1 风管清洁机器人
风管是实现空气输送和分布的管道系统,可按截面形状分为圆形风管、矩形风管、扁圆风管等。20世纪90 年代末才诞生了风管清扫移动机器人,其中代表性的产品有:英国的 Indoor、瑞典的 Wintclean、韩国的Hanlin、加拿大的沙漠风暴等[10]。这些机器人的结构大同小异,移动机构基本采用轮式或双履带式,性能水平并没太大差别。中国的履带式风管管道机器人主要有上海亿仕龙公司和东华大学的多履带腿式风管机器人[11]。浙江大学研究的中央空调管道式通风系统清洁机器人能够同时清扫两个壁面[12]。
风管机器人主要采用轮式或者履带式,能在风管中自由移动,可作为电缆隧道检测机器人的有效参考。
2.2.2 油烟管道清洁机器人
油烟管道可实现对油烟的排放。油烟管道清洗机器人是专门针对酒店、宾馆、学校、企事业单位等的油烟管道专用清洗机器人。机械装置主要由爬行装置和喷杆运动机构组成,其工作原理为:机器人由爬行装置实现管道内部的运动作业,喷杆运动机构以爬行机构为搭载平台,装载高压流喷杆来实现管道内部的全面清洗。油烟管道机器人主要采用螺旋式或者履带式结构。螺旋管道机器人采用螺旋运动方式,能够更好地适应油烟管道环境。中国武汉亚伯兰机电有限公司生产的烟道机器人的质量为18 kg,最大爬坡能力为30%,采用高压射流清洗,电源220 V,功率60 W[13]。大连工业大学也提出了类似的烟道机器人[13]。
螺旋式油烟管道机器人对管道半径有依赖,履带式油烟管道机器人可以更自由地行走,可作为电缆隧道检测机器人的有效参考。
2.2.3 排水管道清淤机器人
排水管道的清洁主要采用高压水射流技术,并结合传统管道清洗技术,主要应用于市政燃气、给排水工程、油田、矿业、电力、造纸、化工、建筑等行业。
2000年,德国圣奥古斯汀的Fraunhofer自动化智能系统研究所成功研制了世界上第一个链式污水管道机器人——MAKRO管道机器人[14]。它采用分段蠕虫状外形设计,具备了前所未有的灵活性,适用于大直径、淤积不严重、管路复杂的排水管道。2002年,美国佛罗里达大学电子及计算机工程学院智能机械设计实验室研制了OH’S管道清理机器人[15],该机器人由头部、驱动、稳定性控制三个部分组成。清华大学研制的下水自动清淤机器人[16]适用于直径为400 mm的管道,载体采用了轮式行走机构、四轮驱动方式,以三相异步电机作原动机。哈尔滨工程大学的城市排水管道穿缆检测机器人[17]采用了履带式行走机构,可检测、疏通直径大于500 mm的城市排水管道。
排水管道清洁机器人主要采用轮式和履带式结构,能够在管道内有效行走,可为电缆隧道检测机器人设计提供参考。
3 管道机器人移动结构分析和选择
通过对以上重要管道环境和管道机器人进行分析,可发现电缆隧道环境相对复杂,对机器人移动结构要求很高,目前仅有少数科研机构对电缆隧道检测机器人进行了直接研究。表1是对各种机器人移动结构的综合比较,其中排水管道、风管和油烟管道等的环境比较接近电缆隧道,机器人移动结构设计以轮式、履带式和多节结构为主。在石油管道或者燃气管道等环境中,机器人对管壁的依赖比较高,主要采取固定管径或者变径结构方式。在燃气管道中采用多节移动结构,可以更加方便地通过T型或90°弯管。

表1 各种移动结构的综合比较
从表1分析可知,履带、轮式、多节结构是较为可行的移动结构,可作为电缆隧道机器人移动结构的参考,下面对这三类移动结构作进一步分析。
3.1 履带式移动结构
履带式移动结构能够在油污、泥泞、障碍等恶劣条件下达到良好的行走状态。履带与管底部的接触面积大,附着力也大,具有优越的越障性能,适用于复杂的管道内环境。履带式结构机器人靠履带卷绕时管道底部对履带产生的反作用力,推动机器人在管道内运动。其中起主要作用的是机器人履带的驱动段和接地段,通过驱动段产生拉力(相对机器人而言是内力),将接地段从重轮下拉出,与管道底部产生反作用力(外力),提供较强的驱动能力。
履带结构复杂,不易小型化,转向性能不如轮式移动结构。当障碍物的高度超过履带轮直径一定程度时,无法实现有效跨越。只有克服以上缺点,履带式移动结构才能在电缆隧道中应用。
3.2 轮式移动结构
轮式管道机器人以其结构简单、运动平稳、速度快、行走效率高、易于小型化和控制容易等优点,在风管和排水管道等管道环境中大量使用。轮式移动结构可以分为支撑轮式和车型式两种,在管道中各有优缺点。
支撑轮式在结构上采用对称的形式,机器人通过沿管道轴向等间隔分布多组行走机构,支撑在管道内壁上,能在管内自定心行走。随着管道直径发生变化或者机器人在管道内部调整姿势,机器人的中心轴线需要与管道中心轴线保持一致;由于对称支撑的作用,会产生较大的封闭力和很强的牵引力,使机器人可以在垂直管道内行走。但由于对管道直径和管壁过于依赖,支撑轮式不太适合电缆隧道环境。
车型式移动结构较简单,体积较小,在管道内运动灵活,可以在电缆隧道内有效运行。但是其牵引力较小,爬坡能力有限,不能直接进入垂直圆管内。机器人在圆管内的运动稳定性只存在于较小的旋转姿态范围内,需要产生附加封闭力的装置。在电缆隧道底部,运行环境相对平坦和宽敞,可以克服无外加封闭力的缺点,在增强牵引力的基础上可以较好地进行转弯和爬坡动作。
在设计电缆隧道机器人移动结构时,可以考虑支撑轮的优点,提供有效的牵引力和爬坡支撑力。
3.3 多节移动结构
多节移动结构机器人的节与节之间通过可控万向绞链连接,其支持方式采用弹簧支持式连杆结构,可以适应一定的管径范围。多节中前后各有一个驱动节或转向节,中间为工作节,用于搭载各种传感器进行作业,前进和后退方向都具有主动转向能力,从而实现越过障碍物或者拐弯运动,并通过各种弯管接头。
为了使机器人能够在管道内灵活地进行弯道转弯运动,将机器人的多种功能分散到相互联接的单元体上,每一单元体中都安装有各种元器件,如驱动单元、检测控制单元、电池单元、管道清理单元等;单元体上、下各有一个滑动轮,下方的滑轮是固定在单元体上起支撑作用的,上方的滑轮可上下伸缩,以确保在管道内有污垢时机器人能够顺利通过;各段之间采用可自由分合的连接方式,当机器人某段单元体卡在管道中时,其他单元体可以与其断开,执行其他操作。
对于电缆隧道这样复杂的环境,需要检测的目标比较多,搭载的传感器数量也很多。采用多节的方式不仅可以搭载足够的传感器,而且可以有效地在电缆隧道中运行,这种设计思路值得借鉴。
4 电缆隧道检测机器人移动结构
4.1 机器人移动结构设计
为了使机器人有效地在电缆隧道环境中运行,可以结合履带、轮式、多节结构的优点,设计出三节移动结构的机器人。采用对称设计,每一节的底座使用履带,前后两节中采用前导驱动轮作为支撑轮,以搭载足够的传感器;利用支撑轮和摆臂的作用,进行有效的避障;利用履带的优点,实现良好的行走;可以在不掉头的情况下,利用前后两头相同的设计,实现双向行走。电缆隧道检测机器人移动结构如图2所示。

图2 机器人移动结构图
电缆隧道检测机器人移动平台设计为三节,前后两节的移动结构是相同的,提供主要的驱动力,实现避障、转弯、爬坡、主动转向等功能。机器人搭载CCD云台、红外热成像仪等成像传感器,探知电缆隧道内部的环境,通过天线向地面控制中心无线传输图像和数据信息;在机器人底部搭载超声波传感器,用于探测和避障; 中间的一节搭载温度检测传感器、气体检测传感器等,满足电缆隧道环境检测的需求。
电缆隧道检测机器人移动结构采用对称分布,移动平台一共采用六台电机。中间节为被动式运动,无需安装电机驱动;前后两节各配置三台电机,其中一台用于驱动前导驱动轮,通过控制摆臂电机将蜗杆减速机和摆臂相连,利用蜗杆传动的自锁性,来控制摆臂的角度,从而使机器人能更加方便地通过障碍物。其他两台电机各驱动一条履带,通过控制履带的差速运动实现机器人的转向运动。
对称分布结构是在每两节之间采用可控平衡连杆连接,连杆由支持弹簧座、弹簧、滑块等组成,各节之间还搭载通信线缆,可实现节与节之间的信息交互和控制。
4.2 机器人运动分析
机器人移动结构的运动分析主要包括跨越障碍物、爬坡、转弯和避障等,从这些运动中可以看到本移动结构的优点,可适应复杂的电缆隧道环境,完成机器人检测的任务。当机器人前方出现大的障碍物(如台阶、门槛等)且高度明显超过机器人底座时,机器人通过调节前导驱动轮和摆臂位置,顺利通过壁障,具体策略如图3所示。

图3 机器人跨越障碍物策略示意图
当机器人遇到大角度的斜坡时,利用履带驱动能力强的优点进行运动,其上、下坡策略如图4所示。
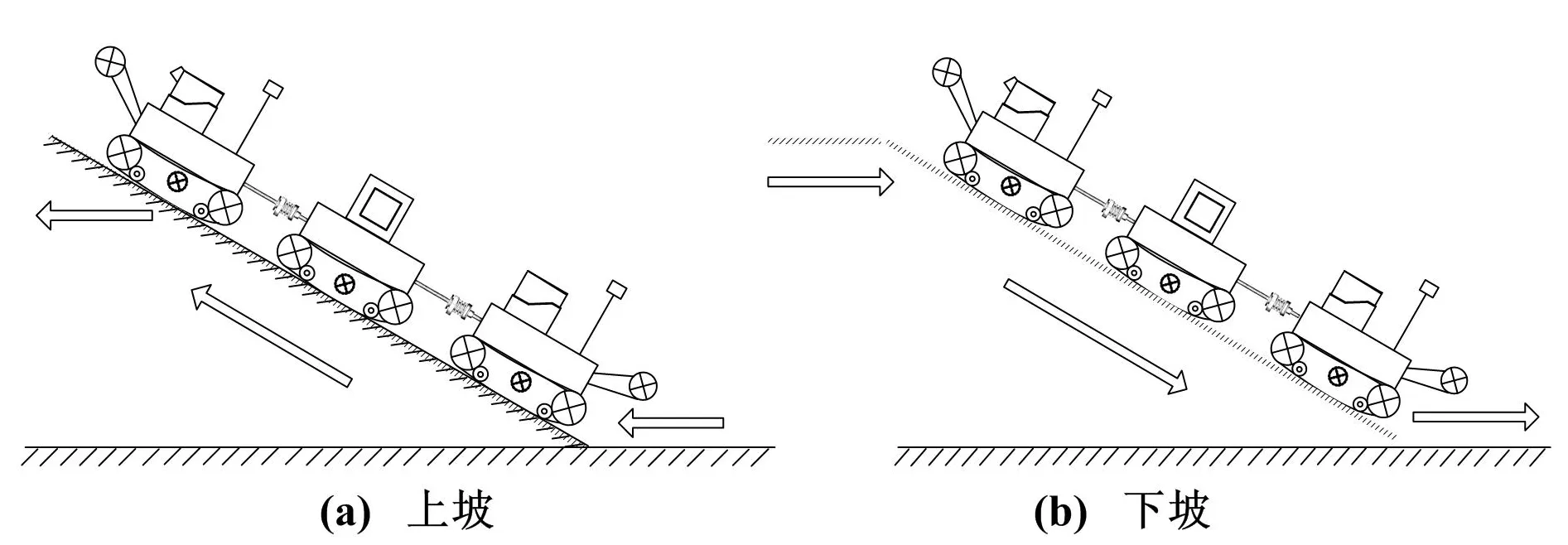
图4 机器人上、下坡策略示意图
当机器人转弯或者避障时,利用底座安装的超声波传感器检测电缆隧道内的情况,实施转弯或避障策略,其运动轨迹如图5所示。

图5 机器人转弯和避障策略示意图
5 结束语
由于电缆隧道环境比一般的管道环境更加复杂、需要检测的对象更多,因而对机器人移动结构的设计要求更高。本文在研究和分析了现有电缆隧道和相关管道机器人移动结构的基础上,提出一种结合履带、轮式、多节结构的机器人移动结构设计,可以搭载足够数量的传感器,并提供较强的驱动力,从而有效地进行转弯和避障等行为,在电缆隧道中行走自如。今后还需重点解决避障、弯道通过性、供能和通信等问题,使之具有实际工程应用价值。
[1] 谢振宇.电缆隧道综合检测机器人控制系统研究[D].上海:上海交通大学,2008.
[2] 戚伟.电缆管道机器人视频监测系统的开发[D].上海:上海交通大学,2008.
[3] 刘凯.电力隧道智能巡检机器人系统的技术探讨[J].城市建设理论研究,2014,4(35):78-79.
[4] 姜芸,付庄.一种小型电缆隧道检测机器人设计[J].华东电力,2009,37(1):95-97.
[5] 甘小明,徐滨士,董世运,等.管道机器人的发展现状[J].机器人技术与应用,2003,32(6):45-49.
[6] 王永雄.管道机器人控制、导航和管道检测技术研究[D].上海:上海交通大学,2012.
[7] 张涛.管道传感器测漏方法综述[J].中国仪器仪表,2006,23(10):25-27.
[8] 陈世彬.管道内表面自适应珩磨光整加工装置的设计与研究[D].太原:太原理工大学,2016.
[9] 李成群,马利平,路春光,等.牵引式排水管道清淤机器人的研究[J].制造业自动化,2014,36(11):57-60.
[10]谢振宇,付庄,宋国强,等.基于行为的电缆隧道综合检测机器人控制系统研究[J].机械与电子,2008,54(4):47-51.
[11]ISELEY T.Pipeline condition assessment:achieving uniform defect ratings [C]//Proceedings of Infra 99 International Conference,1999:121-132.
[12]刘莹,申超.中央空调管道式通风系统清洁机器人[J].机械科学与技术,2011,30(3):435-439.
[13]胡亚南,马书根,李斌,等.移动型模块化机器人的高效重构规划方法[J].机器人,2016,38(4):467-474,485.
[14]王殿君,李润平,黄光明.管道机器人的研究进展[J].机床与液压,2008,36(4):185-187.
[15]任新新,胡文韬,吕海翔,等.电缆管道巡检清理机器人的研究与设计[J].电力电子技术,2016,34(2):21-24.
[16]许冯平,周延,赵志聪.蠕动式排水管道机器人研制[J].数控与自动化,2014,45(10):190-193.
[17]张天.仿生液压四足机器人多传感器检测与信息融合技术研究[D].北京:北京理工大学,2015.
Research on the Moving Structure of Split Cable Tunnel Inspection Robot
FENG Ling,YANG Huaxia,WEI Dong
(Electric Power Research Institute,State Grid Chongqing Electric Power Company,Chongqing 401123,China)
With the increasing number of the urban cable tunnels,in order to ensure the safety operation of cables and environmental inspection inside tunnels,it is of great value and significance to study on replacing manual operation by the robots for cable tunnel detection.At present,the research on robots for cable tunnel detection at home and abroad is still in the initial stage of development.The current situation of the cable tunnel detection robots is introduced.For the collection of information about environmental image,temperature and toxic gas in the cable tunnel,it is necessary to develop the moving structure of robot,to adapt to the complex environment.Based on the analysis and comparison of the structure of the in-pipe robot,which is similar to the cable tunnel environment,the moving structures of track,wheel and multi-section robots are taken as the key reference object of the design.Based on the analysis of the characteristics of the moving structures of track,wheel and multi-section robots,the research idea of the multi-section split robot is proposed,and the moving structure of the split type robot is designed.The superiority of this moving structure is verified by the analysis of motion of robot.This provides useful reference for subsequent research on cable tunnel detection robots.
Robot; Cable tunnel; Sensor; Communication; Environmental monitoring; Oil pipeline; Pipeline inspection
冯凌(1981—),男,硕士,高级工程师,主要从事自动化与高压电能计量技术的研究和推广工作。E-mail:fenglingcq@sina.com。
TH-3;TP2
A
10.16086/j.cnki.issn1000-0380.201706011
修改稿收到日期:2017-01-09
猜你喜欢
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年11期)2021-07-28
建材发展导向(2021年7期)2021-07-16
建材发展导向(2021年6期)2021-06-09
军民两用技术与产品(2021年10期)2021-03-16
水泥工程(2020年3期)2020-10-28
船海工程(2020年6期)2020-01-03
商品与质量(2018年49期)2018-05-25
科学与技术(2018年12期)2018-04-25
筑路机械与施工机械化(2014年8期)2014-03-01
