
GNSS接收机自适应带宽伪码跟踪环路设计
2017-06-27 08:14刘盟超赵丙风
无线电通信技术 2017年4期
刘盟超,赵丙风
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
GNSS接收机自适应带宽伪码跟踪环路设计
刘盟超1,2,赵丙风2
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
从GNSS接收机对伪码延迟锁定环(DLL)快速稳定的需求出发,分析了环路滤波器带宽对码环性能的影响,对不同带宽下环路的稳定时间和跟踪精度进行了测试。提出了一种自适应带宽的码环设计方案,通过对环路滤波器带宽的实时调整,有效地实现了码环牵引过程的快速稳定和精确跟踪,提升了码环性能。利用自研的GNSS接收机进行了测试和验证,测试结果表明码环稳定时间小于400 ms。
延迟锁定环路;稳定时间;自适应带宽;GNSS
0 引言
随着全球卫星导航系统(GNSS)的建设和GNSS接收机的广泛应用,用户对GNSS接收机的连续定位能力提出了越来越高的要求[1]。但是,在城市、丛林及山谷等复杂环境应用中,卫星信号经常受到短时遮挡,因此失锁后的快速重定位技术成为了GNSS接收机的研究热点之一。对于短时信号遮挡,GNSS接收机可以采用码相位预测的方法完成信号的快速捕获[2],但是从捕获完成(通常伪码误差为0.5码片)到伪码跟踪环稳定(通常伪码误差小于0.02码片)的时间仍是制约定位恢复的主要因素。
本文对GNSS接收机伪码延迟锁定环路(DLL)的环路带宽对其稳定时间的影响进行了分析,设计了一种自适应带宽的环路滤波器,有效地提高了码环稳定速度,并在自研的GNSS接收机上进行了测试和验证。
1 延迟锁定环路(DLL)基本原理
延迟锁定环(DLL)是完成导航卫星信号伪码跟踪的环路[3],由本地伪码产生器、鉴相器、环路滤波器和数控振荡器(NCO)组成,其原理框图如图1所示。
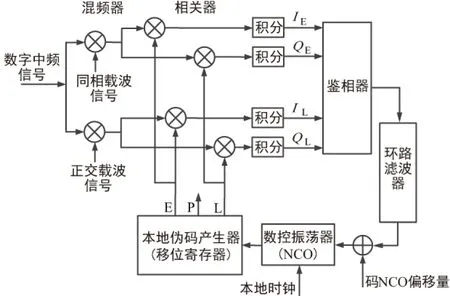
图1 伪码延迟锁定环路原理图
码环鉴相器的基本原理是利用了扩频码的自相关和互相关特性[4-5],通过超前(Early)、即时(Prompt)和滞后(Late)3个相关器的相关结果,计算出伪码相位的差异。常用的鉴相方法有以下几种:
① 非相干超前减滞后幅值法:

(1)
② 非相干超前减滞后功率法:

(2)
③ 相干点积功率法:

(3)
3种鉴相方法中,非相干超前减滞后幅值法是最准确的码环鉴相方法,但由于要进行开方运算,运算量较大,工程中常用JPL近似或Robertson近似完成开方运算[6];非相干超前减滞后功率法会产生一定的鉴相误差,并且鉴相噪声是3种鉴相方法中最大的[7];相干点积功率法运算量最小,但是采用相干方法实现的鉴相器依赖于载波锁相环的稳定跟踪,会导致DLL的稳定时间变长[8]。
环路滤波器通常是一个低通滤波器[9],其目的在于降低环路中的噪声,使滤波结果能够真实地反映输入端本地伪码与卫星信号之间的相位偏差,控制数控振荡器(NCO)对本地伪码产生器进行调整,最终反馈回相关器形成闭环,环路滤波器的阶数和噪声带宽是其主要设计参数。
环路滤波器的阶数越高,其动态适应性越强,能够适应更高阶的动态应力;但同时会存在更严苛的稳定门限和更高的设计复杂度。在通常的中低动态应用中,二阶环路滤波器是GNSS接收机的普遍选择[10]。二阶环路滤波器框图如图2所示。

图2 二阶环路滤波器图
2 带宽对码环稳定时间影响分析
噪声带宽(BL)是环路滤波器的另一个重要设计参数。噪声带宽越窄,通过环路的噪声越少,环路的滤波效果越好,环路对信号的跟踪就越精确;噪声带宽越宽,环路对高动态应力所引起的信号频率波动适应力越强,就可以更好地支持用户的高动态运动。同时,由于二阶环路滤波器的噪声带宽与其特征频率(ωn)成简单的正比关系,而ωn的大小影响着环路的收敛速度,所以噪声带宽的大小对此也有影响。
在GNSS接收机中,完成位置解算的伪距观测量是根据DLL对卫星信号的同步而获得的,因此DLL的跟踪误差是伪距测量误差的直接来源。选择合适的环路噪声带宽使伪距测量误差满足接收机的设计指标要求,是伪码跟踪环设计的重要环节。在中低动态的GNSS接收机中,通常要求码环跟踪误差小于0.02码片甚至更低[11],此时通常要求环路噪声带宽小于5 Hz[12-13]。在卫星信号跟踪的建立阶段,首先由捕获模块完成的初步的相位匹配,其输出的码相位匹配误差通常为0.5码片[14];然后,由码环对本地伪码信号进行牵引,使本地伪码相位误差由0.5码片逐渐缩小到符合定位要求的小于0.02码片,从而使码环进入到稳定跟踪状态[15]。
在码环牵引阶段,环路噪声带宽是牵引速度的重要影响因素之一。为了分析环路带宽对稳定时间和环路跟踪精度的影响,图3和表1利用自研的GNSS接收机对不同环路带宽下的码环牵引状态进行了测试。其中,信号频点选取北斗卫星导航系统(BDS)的B1频点,信号中频为15.902 MHz,采样频率为62 MHz,超前滞后相关器与即时相关器的间隔为0.5码片,码环鉴相方法选择非相干超前减滞后幅值法。由测试结果可以看出,环路带宽越大,其稳定时间越短,但是稳态跟踪误差越大。

图3 不同带宽的码环牵引状态
表1 不同带宽码环牵引结果
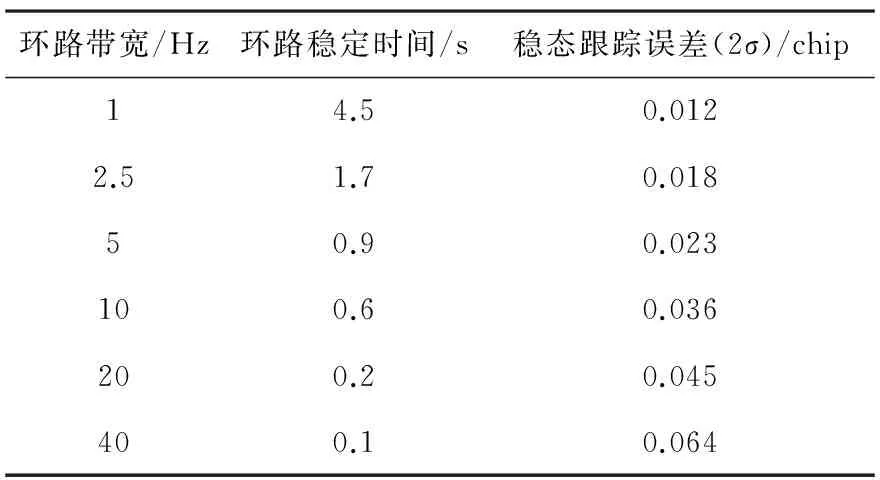
环路带宽/Hz环路稳定时间/s稳态跟踪误差(2σ)/chip14.50.0122.51.70.01850.90.023100.60.036200.20.045400.10.064
3 自适应带宽码跟踪环路设计
由上文对码跟踪环路噪声带宽对环路牵引状态的影响分析可知:更宽的环路带宽能够使环路快速稳定,但是却存在较大的环路跟踪误差;反之,较窄的环路带宽能够保证更高的环路跟踪精度和更小的稳态误差,但是却需要较长的稳定时间。由此可见,在传统的固定带宽的码跟踪环路设计中,降低环路跟踪误差和提升环路稳定速度的要求相互矛盾。因此,本文提出了一种自适应带宽的码跟踪环路设计方案,该方案如图4所示。
在自适应带宽码跟踪环路中,通过增加一个滤波器对鉴相器的结果进行滤波,同时增加环路牵引时间计时,通过滤波结果和牵引时间来实时调整环路带宽,选择合适的带宽并完成环路滤波器参数的调整。这样,在环路的牵引初始阶段,由于相位误差较大,环路滤波器选择较大噪声带宽,实现快速震荡和收敛;在牵引过程中,随着相位误差逐渐减小,环路滤波器的带宽随之变窄,使环路输出逐渐稳定,也将环路带宽调整到最优状态,进行信号的稳定跟踪。

图4 自适应带宽码跟踪环路
自适应带宽码环的工作分为2个阶段:第一阶段,当信号完成捕获后,牵引时间计时器开始计时,控制环路参数产生器选择较宽的噪声带宽设计环路参数,当牵引时间达到门限值T时,关闭牵引时间计时器,转由滤波器控制环路参数产生器;第二阶段,由滤波器对鉴相器的鉴相结果进行滤波,利用滤波结果实时地调整噪声带宽设计,控制环路参数产生器产生相应的环路参数。
具体设计中,需要综合考虑环路性能和设计复杂度,选择最佳的设计参数。其中,滤波器的设计采用α滤波器,系数为0.05;牵引时间门限值T的设计须保证环路滤波器充分震荡以及α滤波器初始化,这里选择为100 ms;环路参数产生器设计为5档带宽查表选择参数,以减少运算复杂度,各档带宽为40 Hz、20 Hz、10 Hz、5 Hz和2.5 Hz。
采用自适应带宽码环实现快速牵引的结果如图5所示。
从结果中可以看到由于在牵引阶段使用了较宽的环路带宽,环路滤波器快速完成震荡和稳定;随后带宽逐步减小,进入到稳定跟踪阶段后,环路跟踪误差满足0.02码片的要求。

图5 自适应带宽码环牵引结果
4 结束语
环路滤波器的噪声带宽是伪码延迟锁定环设计中的重要参数,不同的带宽设计对码环的稳定时间存在较大影响,进而影响GNSS接收机的失锁重定位性能。本文改变了在牵引阶段和稳定跟踪阶段采用同一带宽设计码环的模式,在牵引状态时采用较宽带宽进行码环滤波器参数设计,而随着通道进入稳定跟踪,自适应地将环路带宽减小,从而在保证环路跟踪精度的前提下加快环路稳定速度。通过自研的GNSS接收机进行了实际测试和验证,实验结果表明,自适应带宽码环能够在400 ms内完成信号稳定跟踪,相对于固定带宽码环的稳定时间有很大改善。
[1] 杨杰,张凡.高精度GPS差分定位技术比较研究[J].移动通信,2014,38(2):54-58,64.
[2] 刘文焘.GPS接收机的失锁后处理研究[J].遥测遥控,2010,31(1):22-25.
[3] 杨文津,赵胜,段召亮.一种改进的BOC信号码跟踪环路设计方法[J].无线电工程,2014,44(2):21-23.
[4] 余红明,腾潢龙.一种基于超长序列扩频调制解调技术的实现[J].移动通信,2015,39(12):68-71.
[5] 何成龙,王垚.GPS L1C信号Weil码相关性能分析[J].无线电通信技术,2013,39(1):32-35.
[6] 寇艳红.GPS原理与应用(第2版)[M].北京:电子工业出版社,2012.
[7] 孙福余,张鹏,徐亚明,等.GPS软件接收机码环鉴相器研究[J].大地测量与地球动力学,2012,32(4):144-147.
[8] 孟骞,刘建业,曾庆化,等.GNSS软件接收机码环鉴别器性能评估与改进研究[C]∥第五届中国卫星导航学术年会电子文集-S7北斗/GNSS用户终端技术,2014:123-130.
[9] 杨再秀,王茂磊,郭晓峰,等.基于通用环路的GNSS码跟踪性能分析方法[J].无线电工程,2015,45(7):45-49.
[10]尹燕,赵明生,蔡凡.数字直扩接收机中同步环路设计与仿真[J].计算机仿真,2006,23(11):325-327.
[11]姚彦鑫,杨东凯,丁凡,等.GPS码精密跟踪环路的研究[J].武汉大学学报,2010,35(11):1355-1357.
[12]吴琼,寇艳红,郑兴平.高动态GPS 接收机环路跟踪技术研究[J].无线电工程,2008,38(12):32-36.
[13]李文联,雷玉洁,金璐,等.全球导航定位系统接收机的跟踪环路带宽设计[J].武汉工程大学学报,2013,35(3):66-69.
[14]项家伟,韦志棉,熊小军.一种基于数字匹配滤波器的伪码捕获方法[J].无线电工程,2011,41(11):28-30.
[15]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:349-366.
Design of Adaptive Bandwidth DLL for GNSS Receivers
LIU Meng-chao1,2,ZHAO Bing-feng2
(1. State Key Laboratory of Satellite Navigation System and Equipment Technology,Shijiazhuang Hebei 050081,China;2. The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Based on the requirement of fast setting of the Delay Lock Loop (DLL) on GNSS receivers,this paper analyzes the influence of the loop filter bandwidth on the performance of the code loop,and tests the setting time and tracking accuracy of the loop under different bandwidths. An adaptive bandwidth DLL is proposed,which can effectively achieve the fast setting and accurate tracking through the real-time adjustment of the bandwidth of the loop filter,and thus improves the performance of the code loop. A self-developed GNSS receiver is used to test and verify the proposed solution. The result shows that the setting time of the DLL is less than 400 ms.
Delay Lock Loop (DLL);setting time;adaptive bandwidth;GNSS
10. 3969/j.issn. 1003-3114. 2017.04.15
刘盟超,赵丙风. GNSS接收机自适应带宽伪码跟踪环路设计[J].无线电通信技术,2017,43(4):64-66,79.
[LIU Mengchao,ZHAO Bingfeng. Design of Adaptive Bandwidth DLL for GNSS Receivers[J]. Radio Communications Technology,2017,43(4):64-66,79. ]
2017-03-22
国家高技术研究发展计划(863计划)项目(2015AA124001)
刘盟超(1985—),男,工程师,硕士,主要研究方向:卫星导航信号处理。赵丙风(1988—),男,助理工程师,硕士,主要研究方向:卫星导航信号处理。
TN967.1
A
1003-3114(2017)04-64-3
猜你喜欢
河北工业大学学报(2021年4期)2021-09-23
河北大学学报(自然科学版)(2020年2期)2020-05-22
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
探测与控制学报(2018年2期)2018-05-09
现代防御技术(2017年2期)2017-05-13
无线电通信技术(2017年2期)2017-03-02
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
探测与控制学报(2015年4期)2015-12-15
