
基于STM32控制的大功率直流电机调速系统*
2017-07-01 18:00吴攀周凤星武汉科技大学信息科学与工程学院武汉430081
组合机床与自动化加工技术 2017年4期
吴攀,周凤星(武汉科技大学信息科学与工程学院,武汉430081)
基于STM32控制的大功率直流电机调速系统*
吴攀,周凤星
(武汉科技大学信息科学与工程学院,武汉430081)
针对直流电机调速系统大功率高精度的控制需求,设计了一种基于STM32单片机和H桥的新型控制系统。该系统使用光电编码器作为速度检测传感器,利用光电隔离器设计了一种大功率直流电机驱动控制电路,直流电机利用PWM脉宽调制以及PID算法实现对直流电机速度,启停,转向准确控制。上位机采用LabVIEW编写,实时监控直流电机运行状态。描述了硬件的设计方案。通过实验结果表明,该直流调速系统具有调速精准,低功耗,大功率的优良工作特性。
STM32控制;H桥;大功率驱动
0 引言
社会生产中,大功率交流电机的应用非常普遍与成熟,但在只有直流电源的应用场合下,大功率高精度的直流电机调速系统[1]就十分稀缺。目前,国内外直流调速系统设计研究主要集中于小功率灵活化,例如大多数文献研究资料采用IR2104,IR2110系列驱动芯片,采用这些芯片设计的小功率直流电机调速系统,驱动电流不超过5A,只能应用于小功率直流电机,针对这个问题,本文设计了大功率直流电机调速系统。
1 系统总体结构
微控制器通过通讯接口(例如A/D、并口通讯、串口通讯等)从上位机获得直流电机设定转速,光电编码器测得电机速度负反馈信号,将给定的速度信号与反馈的速度信号相减,经过控制算法计算出PWM占空比后,驱动直流电机驱动模块,实现对电机转速的准确控制[2-3]。系统结构框图如图1所示。
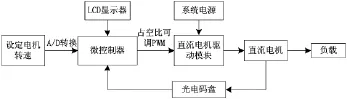
图1 系统结构框图
2 硬件设计
2.1 驱动放大电路设计
根据实际使用需求,采用H桥驱动电路[4-5]。组成H桥开关管分为Q1,Q2,Q3,Q4,实现直流电机正反转工作,H桥拓扑原理图如下。

图2 H桥驱动拓扑结构
直流电机速度控制信号PWM和直流电机正反工作控制信号DIR经过电机驱动逻辑电路[6]分解为PWM1,PWM2,DIR+,DIR-,其中PWM1与PWM波形一致,PWM2与PWM波形反向,DIR+与DIR波形一致,DIR-与DIR波形反向,驱动光电开关实现直流电机的速度和转向调控。
采用了光电隔离去驱动场效应管,将直流电机的工作电源与单片机系统的工作电源隔离开来,减少了驱动电路产生的谐波对其他电路的干扰,提高了系统的可靠性。H桥驱动拓扑中,本文以PWM1和DIR+为一组控制电机转速和转动方向的驱动信号进行说明,两路信号的驱动放大设计都采用光电隔离器。
根据直流调速系统的要求不同,H桥驱动电路中,4个NMOS开关管的驱动选用不同的光电隔离开关,上桥臂选用普通低频率光电隔离开关TLP785;下桥臂选用TLP785和快速光电隔离开关TLP109,两者搭配使用。
DIR为1时,DIR+为1,如图3光电隔离器J1导通,Q1开关管门极电压为12V,Q1饱和导通,电源电压U加于电机电压电枢一端。
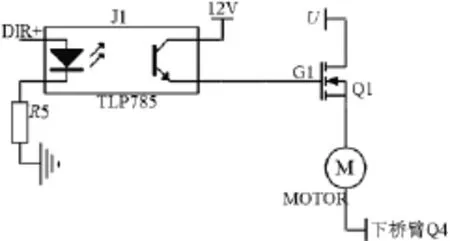
图3 Q1开关管驱动放大原理图
当DIR+为1时,由于采用了驱动逻辑电路,PWM1的波形与PWM的波形完全一致,另外一组PWM2和DIR-都为0。如图4所示,当PWM1为高电平1时,经过非门M0,A点电位为0,光电隔离开关M1导通,Q4门极G4点点位+12V,门极电压+12V近似于直接与电源电压相接,Q4饱和导通,由于增大场效应管门极的驱动脉冲幅值G4,可以缩短场效应管导通延迟时间td(on),其值为1.5μs[6];当PWM1为低电平0时,经过非门M0,A点电位为1,光电隔离开关M1截止,由于A点高点位,M2光电隔离开关TLP109导通,驱动级联三极管M3导通,串入门极的电阻RG近似为0,Q4门极G4点电位为0,Q4截止,由于减少串入门极的电阻RG,可以缩短场效应管截止延迟时间td(off),其值为1.5μs[6]。因此G4点脉冲波形与PWM1波形一致,仅脉冲幅值不同。又M1、M2工作在推挽模式,G4点电位为幅值12V,与PWM1波形频率一致的矩形脉冲。此时PWM2和DIR-都为0,PWM2和DIR-分别驱动的开关Q2,Q3工作在截止状态。这时H桥的4个场效应管Q2,Q3为截止状态;Q1饱和导通,Q4工作在受PWM占空比调制的工作状态。电机电枢两端通过Q1和Q4加U电压降,此时电机工作于正转状态。通过调节PWM占空比,即可调节电机转速。PWM占空比从0%~100%连续可调,对应电机转速从零到最大转速连续可调。
同理DIR为0时,DIR+为0,PWM1为0,DIR-为1,PWM2与PWM波形一致。这时H桥的4个场效应管Q1,Q4为截止状态;Q2饱和导通,Q3工作在受PWM占空比调制的工作状态。电机电枢两端通过Q2和Q3加-U电压降,此时电机工作于反转状态。通过调节PWM占空比,即可调节电机转速。占空比PWM从0%~100%连续可调,对应电机转速从零到最大转速连续可调。
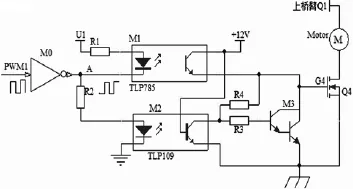
图4 Q4开关管驱动放大原理图
本文设计的光电隔离驱动放大器,工作在PWM调制状态下的NMOS开关管[7],导通时门极直接加电源电压12V,MOS管导通的上升沿只需要1.5μs左右,饱和导通;NMOS开关管截止时,通过三极管级联然后与NMOS并联,关闭NMOS关只需要0.5μs,由于设计大大缩短了NMOS管的导通和截止时间,因此对直流电机输出的矩形脉冲波形非常理想。本文选用的功率开关,漏极电压UDS耐压75V,漏极电流ID达到120A,理论上可以输出功率9000kW,考虑环境因素及大电流发热对功率开关的影响,综合实验可得稳定驱动电流达到60A,可以满足直流电机大功率驱动要求。
2.2 速度负反馈模块电路设计
ZKT9040旋转编码器600线光电码盘,电机每转动一周,会产生两路600个光电脉冲信号A,B。A,B为两相相位相差90°的正交方波脉冲信号,通过单片机计数器在单位时间内计数A、B任意一项脉冲个数即可计算出电机的转速,通过A,B相位之间的关系,就可以判断电机正反转方向。
2.3 显示模块设计
整个调速系统通过LCD显示屏来显示电机的运行参数,如设定速度、实际运行速度,电机正转反转方向,这样方便直观地了解电机的运行状况。另外在对电机调速参数进行优化设置时,通过LCD屏可以显示参数设定的效果,进而可以不断对参数进行优化,使电机调速参数达到理想状态。
2.4 上位机
直流电机控制系统中上位机采用LabVIEW软件编写上位机程序,通过串口通信实现上位机与直流电机调速系统通信,检测并反馈直流调速系统运行的各个状态参量。在速度环控制最优参数整定过程中,监控直流电机的运行状态。
3 实验测试与分析
本系统采用STM32F103作为核心的微控制器,控制电路以STM32F103为核心的最小系统实现大功率直流电机系统调速。通过上位机控制界面对直流电机速度进行设定,从设定转速到微控系统到达指定转速,微控器系统控制主要流程如图5所示。系统中主要由中断和调用子模块完成,当有中断请求时,调用相关中断子模块进行处理。
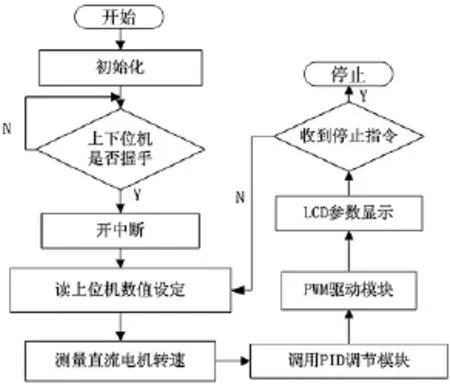
图5 微控制系统主流程图
使用某电机厂直流电动机LX-4进行测试,该电机是低压大功率直流电机,电动机具体参数为:额定电压48V、额定功率1000W、额定转速3000 r/min、额定电流16.2A。电机调速系统中,控制算法常采用PID控制,针对传统的PID算法中参数整定的不足,近年出现了改进的PB网络PID[8]、改进遗传算法PID[9]、PID组合差分法参数整定法[10],综合考虑,本文使用PID组合差分法参数整定法,在正常工作环境下,电机空载运行时,此时系统实验测试结果见表1。

表1 实验测试结果
对于上述大功率直流电动机调速,经过实验测试,系统完全满足实验设计要求,能够实现速度-3000rpm~3000rpm之间任意速度的切换,速度控制精度达到2.5rpm以下,稳态误差不超过0.8,满足电动机大功率高精度的控制需求。
4 总结
本文设计了一中基于STM32F103微控制器,以场效应管为核心搭建的H桥PWM控制驱动电路,设计的放大驱动电路,可以稳定输出60A驱动电流,满足直流电机大功率驱动的需求。该系统采用PID控制算法输出占空比可调的PWM脉冲,调速精准,具有显著的实时响应特点。系统在满足高精度,低功耗,快速响应大功率直流负载应用中具有独特的优势。
[1]杨根,罗应力.电机与运动控制系统[M].北京:清华大学出版社,2014.
[2]朱贵国,汪党.基于STM32单片机的直流电机调速系统设计[J].数字技术与应用,2013(5):2-3.
[3]杨晨阳,王舒憬,王刚.基于ARM的直流电机控制系统设计[J].自动化与仪器仪表,2013(1):57-59.
[4]张正喜,王晓利,张翔.西门子C504单片机在电动机控制中的应用[J].组合机床与自动化加工技术,2007(6): 43-45.
[5]刘晓梅,李洪友.应用IGBT的直流调速系统的设计与研究[J].组合机床与自动化加工技术,2006(6):64-66.
[6]胡发焕,邱小童,蔡咸健.基于场效应管的大功率直流电机驱动电路设计.电机与控制应用,2011,38(4): 21-24.
[7]黄金飞,唐小琦,宋宝,等.基于STM32的负载电流前馈PWM整流器设计[J].组合机床与自动化加工技术,2015(8):66-69.
[8]曹雪,付光杰,牟海维.改进的PB网络PID控制器在无刷直流电机中的应用[J].组合机床与自动化加工技术,2014(8):102-104.
[9]国珍.改进遗传算法在无刷直流电机调速系统PID参数优化中的应用[J].组合机床与自动化加工技术,2013 (9):90-91.
[10]王旭明,郭业才,于小兵.基于组合差分进化算法的PID参数优化整定[J].组合机床与自动化加工技术,2015 (11):80-82.
(编辑李秀敏)
Research on High-power Velocity Regulation of Direct Current Motor Using STM32 Control Processor
WU Pan,ZHOU Feng-xing
(College of Information Science and Engineering,Wuhan University of Science and Technology,Wuhan 430081,China)
According to the control demand of velocity regulation of DC motor with high-power and high precision,a new kind of speed regulation system based on STM32 microcontroller and H-bridge driver was designed.The speed regulation system make use of PWM and PID algorithm as output signal to controlling starting,braking,positive inversion and speed regulation of DC motors,w hich by using photoelectric coder as speed detecting sensor and optoelectronic isolator to design a high-pow er driver circuit.The parameter data of the DC motors was monitored and w ritten by LabVIEW in PC.The hard circuit design were described in this paper.Experimentproof show thatthis kind of speed regulation system for DC motor has the characteristics of precise speed regulation,low-pow er consumption and high driving power.
microcontroller STM32;H-bridge;high-pow er driver circuit
TH166;TG506
A
1001-2265(2017)04-0111-03
10.13462/j.cnki.mmtamt.2017.04.028
2016-08-18
国家自然科学基金项目(61174106)
吴攀(1987—),男,武汉人,武汉科技大学硕士研究生,研究方向控制科学与工程,(E-mail)wupancool2008@qq.com。
猜你喜欢
大电机技术(2022年5期)2022-11-17
科技资讯(2022年21期)2022-10-30
汽车实用技术(2022年12期)2022-07-05
科技视界(2020年18期)2020-07-30
电子制作(2019年16期)2019-09-27
电子制作(2018年23期)2018-12-26
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
