一种基于乘性误差四元数的多天线瞬时测姿算法
2017-07-05 14:58戴卿
西安航空学院学报 2017年3期
戴 卿
(重庆水利电力职业技术学院 建筑工程系,重庆 402100)
一种基于乘性误差四元数的多天线瞬时测姿算法
戴 卿
(重庆水利电力职业技术学院 建筑工程系,重庆 402100)
为进一步拓展全球导航卫星系统(Global Navigation Satellite System,GNSS)测姿应用领域,提升多天线瞬时测姿性能,解决GNSS载波相位观测定姿中的模糊度搜索耗时和周跳探测复杂等问题,提出了一种基于乘性误差四元数的多天线姿态解算方法。使用滤波技术将姿态约束信息通过状态模型和当前观测模型融合,对模糊度进行降权处理,免去周跳探测步骤,从而实现瞬时姿态解算。仿真实验结果表明,新算法既保证了解算效果,又增加了数据处理的灵活性,且耗时更符合实时性需求。
GNSS;多天线测姿;误差四元数;卡尔曼滤波;整周模糊度
0 引言
全球导航卫星系统(Global Navigation Satellite System,GNSS)姿态测量技术具有精度高、实时性好、体积小、成本低,初始化时间短,输出误差不随时间积累等优点,已逐渐成为GNSS应用领域的研究热点[1-2]。由于GNSS姿态测量系统包含先验约束信息,如何利用约束信息辅助整周模糊度瞬时解算是测姿数据处理研究的重点问题[3]。目前多基线观测值直接测姿主要使用基于九参数姿态描述的MC-LAMBDA法(Multivariate Constrained LAMBDA),模糊度搜索效率较低,影响“瞬时”测姿性能,另一方面在GNSS测姿数据处理的算法研究上,常使用单历元最小二乘以避免周跳探测问题,但量测历史信息却没有得到很好的利用[4-5]。滤波算法可以高效平衡历史信息和当前量测,在城市GNSS瞬时测姿等应用中发挥着显著优势[6-8]。
本文推导了一种基于乘性误差四元数的载波相位观测模型和状态模型, 并对模型中模糊度参数进行降权处理,然后在滤波计算中免去周跳探测,新算法可有效利用约束信息和历史信息,提高模糊度浮点解精度,最后利用LAMBDA法(Least-square Ambiguity Decorrelation Ajustment)进行固定解快速搜索。通过仿真实验分析讨论,证明了本算法的有效性。
1 基于乘性误差四元数的模型
1.1 基线观测模型
在GNSS多天线观测中,由主天线i和天线j同步观测卫星p、q构成星站双差方程[9-10]
(1)

(2)
1.2 姿态估计量测模型
由于GNSS的非线性会引起姿态参数关系的非线性,因此需先计算名义姿态阵中包含的姿态误差,再对名义姿态进行误差修正。且当失准角φ较小时,则近似等于俯仰角、横滚角和航向角的欧拉角误差,设当地水平坐标系n和名义当地水平坐标系n′之间的关系用如下姿态矩阵表示
(3)

(4)

(5)

(6)
(7)
若有天线(j1 j2 … jm),则基于失准角和模糊度参数的载波相位观测模型为:
(8)
若有乘性误差四元数δQ=[δq0δq]T,则在误差角为小量的条件下,有
(9)
δq≈[1 δq]T≈[1 φ/2]T
(10)
代入式(7)整理,即可得到基线乘性误差四元数的载波相位观测方程
(11)
1.3 姿态估计状态模型
四元数微分方程
(12)
(13)

(14)
将式(12)和式(13)代入式(14)并整理得
(15)
根据四元数乘法准则,得
(16)
(17)
整理得到包含状态噪声项的乘性误差四元数形式状态模型
(18)
2 滤波解算模型
综合上述观测模型和状态模型,得到基于载波相位观测值估计的滤波形式
(19)
Lk=AkXk+ek
(20)
其中,X为状态向量,Φk,k-1为k到k-1时刻的状态转移矩阵,W为状态噪声项,e为量测噪声项,此处A不同于式(8)处,具体设置为

3 数据实验与分析
在MATLAB编译的GNSS测姿仿真平台进行实验,采样1200历元的观测数据,数据接收频率为1Hz,使用差分方式消除大部分电离层和对流层误差,残余误差为多路径误差和热噪声影响。由三个GNSS天线分别构成两条独立基线,基线载体系坐标分别为[0.0 10.0 0.0]T和[15.0 30.0 0.0]T。姿态解算中使用LAMBDA方法进行模糊度固定解搜索,成功固定的Ratio阈值设为3。卫星高度截止角为15°,观测时段内可见卫星和PDOP值(PositionDilutionofPrecision)良好,如图1所示。仿真载体航向角变换情况如图2所示,在1700s至2400s处发生航向变化。
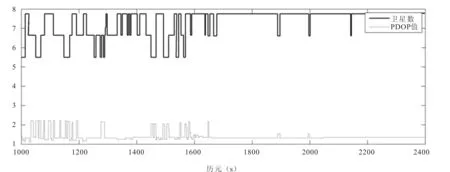
图1 观测卫星数及PDOP值
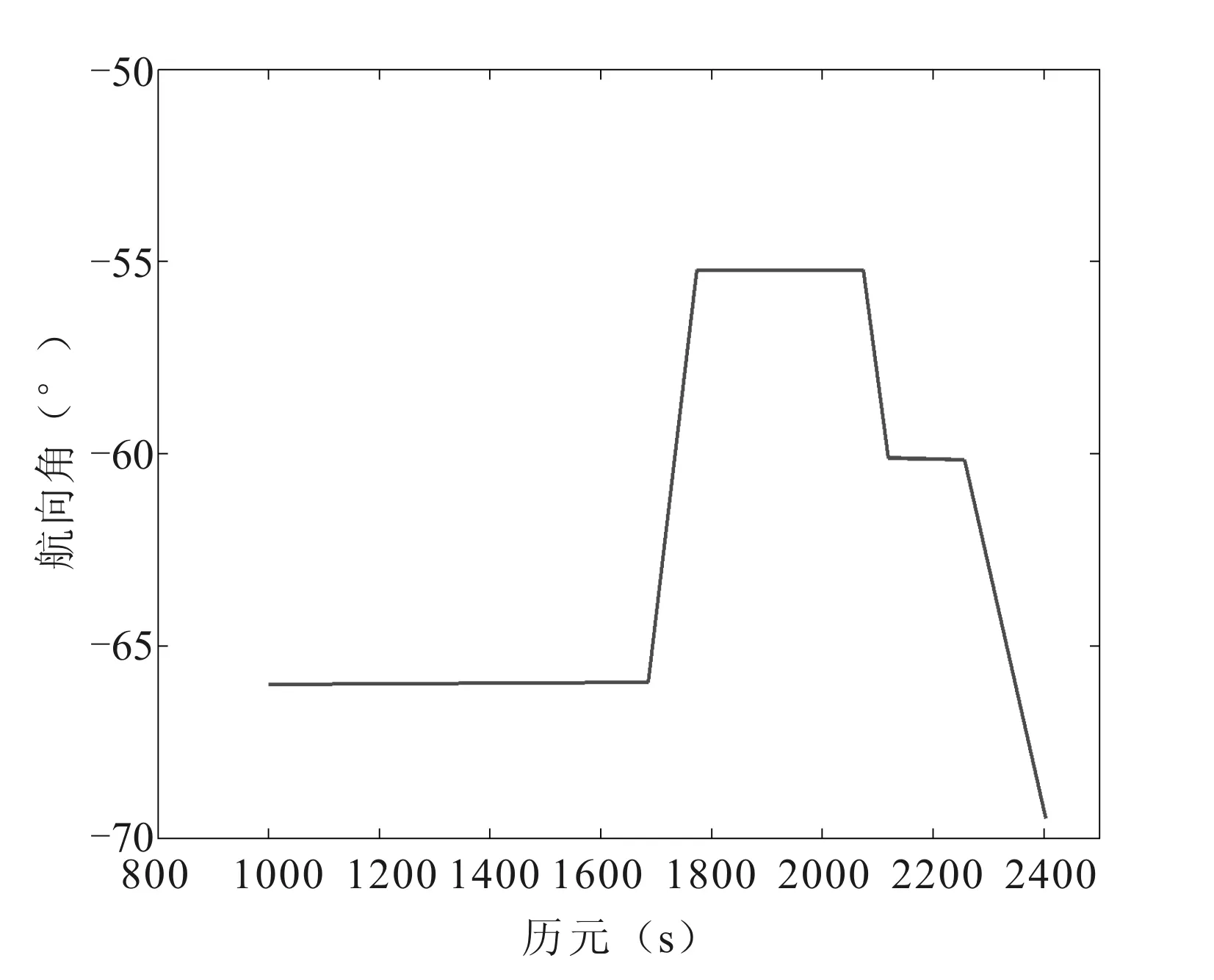
图2 仿真航向角
实验中设计两种不同解算方案:方案1为传统单历元最小二乘法,方案2为本文的新算法。不同方案的模糊度固定结果如表1所示。由表1看出,两种方案均能较好地完成模糊度求解,成功固定模糊度率均在80%以上,可较好地完成高精度姿态测量任务。但方案2模糊度成果固定率要略高于方案1,因为滤波相对于单历元最小二乘算法,可以有效利用历史约束信息,改善观测结构,提高模糊度的成功固定率。

表1 模糊度固定结果
通过方案1和方案2估计航向角的固定解和浮点解结果分别如图3、图4所示。虽然两种不同的解算方案均能较好地完成模糊度固定,姿态解算结果也大体一致,但比较图3和图4发现,固定解结果较浮点解输出曲线更为平滑,且方案2的固定解结果更接近仿真值,说明本文所提新算法在滤波精度上要明显优于传统算法。
表2为对比传统MCLAMBDA方法,两种不同方案的计算耗时。从表2可以看出,在模糊度搜索中引入约束条件,使得MCLAMBDA计算耗时较长,计算效率远低于方案1和方案2。而方案2解算耗时略优于方案1,是由于虽在浮点解计算过程中,滤波比单历元最小二乘要繁琐,但本算例中由于滤波解算得到的浮点解精度高于最小二乘,因此使得模糊度搜索效率有所提高。

表2 所有历元姿态解算总耗时(s)
4 结语
为进一步研究和完善GNSS观测值瞬时高精度测姿技术,本文建立了一种基于载波相位观测值的GNSS测姿算法,可直接计算误差四元数,通过滤波算法对状态模型和观测模型建模,充分有效地利用了约束信息和历史信息。并在滤波算法中对模糊度进行降权处理,避免了周跳探测的复杂性,增加了GNSS测姿数据处理中的灵活性、可靠性和高效性,对今后的多天线GNSS姿态测量系统应用研究具有工程参考价值。
[1] SCHLEPPE J.Development of a real-time attitude system using a quaternion parameterization and non-dedicated GPS receivers[D].Alberta:University of Calgary,1996.
[2] TEUNISSEN P J G.A general multivariate formulation of the multi-antenna GNSS attitude determination problem[J].Artificial Satellites,2008,42(2):97-111.
[3] 高社生,何鹏举,杨波,等.组合导航原理及应用[M].西安:西北工业大学出版社,2012:15-45.
[4] 唐卫明,李笛,迟凤明.北斗卫星导航系统单历元定向算法研究[J].武汉大学学报(信息科学版),2013,38(9):1014-1017.
[5] 王冰,隋立芬,张清华,等.利用GPS解算载体测姿的算法研究[J].武汉大学学报(信息科学版),2013,38(12):1392-1395.
[6] 刘志俭,刘毅.一种基于非专用接收机的GPS实时定姿算法[J].测绘学报,2005,34(3):213-217.
[7] 刘瑞华,张鹏.基于改进LAMBDA算法的GPS载波相位测姿技术研究[J].航天控制,2010,28(3):3-6.
[8] 薛志宏,楼益栋,易文婷,等.一种适用于动态变形测量的双频模糊度实时解算方法[J].武汉大学学报(信息科学版),2012,37(6):683-687.
[9] 谢翔,郭际明,周命端.基于三差法的GPS周跳探测效果分析与实现[J].工程勘察,2013,41(3):63-66,70.
[10] 李金龙,杨元喜,徐君毅,等. 基于伪距相位组合实时探测与修复GNSS三频非差观测数据周跳[J].测绘学报,2011,40(6):717-722,729.
[责任编辑、校对:李 琳]
A Multi-antenna Instant Attitude Detection Algorithm Based on Multiplicative Error Quaternion
DAIQing
(Department of Architectural Engineering,Chongqing Water Resources and Electric Engineering College,Chongqing 402100,China)
In order to further develop GNSS(Global Navigation Satellite System)determination application,improve multi-antenna instantaneous attitude measurement performance,and solve the problem of time consuming in ambiguity searching and complexity of cyclic clips detection using GNSS carrier phase observation to detect attitude,a novel attitude detection algorithm based on multiplicative error quaternion is proposed in this paper.The attitude constraint information is fused by the state model and the observation model using the Kalman filter.And the ambiguity is reduced to avoid cyclic clips detection, and to achieve instantaneous attitude calculation.Through data experiment analysis,result shows that the new algorithm can improve the flexibility of data processing, meet real-time demand,and guarantee the solution effect.
GNSS;multi-antenna attitude detection;error quaternion;Kalman filter;ambiguity
2017-03-07
重庆市教委项目(163253,KJ1735452)
戴卿(1985-),男,河南洛阳人,博士,讲师,主要从事非线性滤波和组合导航数据处理研究。
P228.4
A
1008-9233(2017)03-0008-04
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
学生天地(2020年3期)2020-08-25
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
移动通信(2019年2期)2019-03-27
汽车观察(2018年9期)2018-10-23
科技视界(2018年3期)2018-04-02
发明与创新·大科技(2018年2期)2018-03-17
CHIP新电脑(2016年7期)2016-07-18
诗选刊(2015年4期)2015-10-26