基于改进PSO的模糊PID高枝修剪机械臂末端抑振算法与试验
2017-07-07 00:43侯加林赵新学刘雪美
农业工程学报 2017年10期
李 扬,侯加林※,苑 进,赵新学,刘雪美,张 丽
(1. 山东农业大学机械与电子工程学院,泰安 271018;2. 山东省园艺机械与装备重点实验室,泰安 271018;3. 山东科技大学资源与土木工程系,泰安 271019)
基于改进PSO的模糊PID高枝修剪机械臂末端抑振算法与试验
李 扬1,2,侯加林1,2※,苑 进1,2,赵新学1,刘雪美1,2,张 丽3
(1. 山东农业大学机械与电子工程学院,泰安 271018;2. 山东省园艺机械与装备重点实验室,泰安 271018;3. 山东科技大学资源与土木工程系,泰安 271019)
针对设计的高枝修剪机械臂定位过程易产生振动,难以快速、准确地将待修树枝对入锯切口的问题,分析大臂展、高负载自重比臂架系统的柔性特征,在此基础上研究末端修枝锯的抑振控制方法,实现末端修枝锯的快速精准定位。首先介绍了高枝修剪机械臂结构和工作原理,分析了臂架系统的柔性特征对末端修枝锯定位产生的影响;其次通过结构关系推导和有限元方法建立了机械臂的数学模型并进行动力学分析,并设计基于改进粒子群离线优化的模糊PID控制方法,实现了对末端修枝锯的主动抑振控制;最后分别在Simulink环境中和样机系统上进行了数值仿真和试验验证。综合仿真和试验结果表明:该文设计的控制方法可以实现末端修枝锯的主动抑振,定位过程中修枝锯能够在短时间内进入稳态,超调量不足开环状态下的50%,震荡调整时间小于1 s,经1 s后振幅衰减至峰值的5%以下,从而达到了较好的末端抑振效果,改善了修枝锯的定位性能,提高了高枝修剪机械臂的作业效率。相关研究可为其他具有一定相似柔性特征的机械提供末端抑振和精准定位的控制经验参考。
机械臂;林业;振动控制;振动抑制;柔性特征;改进粒子群;模糊PID
李 扬,侯加林,苑 进,赵新学,刘雪美,张 丽. 基于改进PSO的模糊PID高枝修剪机械臂末端抑振算法与试验[J].农业工程学报,2017,33(10):49-58. doi:10.11975/j.issn.1002-6819.2017.10.007 http://www.tcsae.org
Li Yang, Hou Jialin, Yuan Jin, Zhao Xinxue, Liu Xuemei, Zhang Li. Experiment and vibration suppression algorithm for high-branch pruning manipulator based on fuzzy PID with improved PSO[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 49-58. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.10.007 http://www.tcsae.org
0 引 言
树木修枝是森林抚育的主要措施之一,对树木的生长、成材以及森林防火等具有非常积极的意义[1-3]。国外机械化修枝研究起步较早,配套较为齐全[4-5],8 m以下的侧枝多采用手工工具搭配伸缩臂,也有机械将剪枝工具固定在升降平台之上,通过升降机升降进行高空辅助作业[6]。国内修枝机械起步较晚,但近年来已取得了一些研究成果。如辛继红等[7]设计了一种背负式修枝机;杨乾华等[8]设计了一种电动修枝机;焦恩璋等[9]设计了一种车载式高枝修剪机,以高空作业车(双折臂式或伸缩臂式)为基础,在机械臂末端安装修枝锯、摆动机构实现树木修枝,但须有配套的专用汽车,液压系统复杂,整机成本很高,操作相对复杂;华南热带作物机械研究所[10]设计制造了 3SG-8型升降修剪机,工作台最大起升高度为8.5 m,操作员可以通过安装在工作台上的操纵手柄来控制工作台的位置,提高了工作效率和作业质量。
为填补中国8 m以上修枝机行业的空白,本文设计了一种操作简单、成本较低的移动式高大树木修枝机械,能方便拖曳至林区作业,修枝高度达到15 m,作业半径达到6 m,最大修枝直径10 cm[11-12]。但在锯切定位过程中,由于机械臂展长,具有一定柔性特征,修枝锯定位时易产生振动,难以将待修树枝对入锯口。
本文重点研究修剪机械臂的柔性特征及末端振动抑制问题,推导结构关系式并采用有限元法在Simulink环境中进行修枝臂系统动力学建模和分析;设计模糊 PID控制器,将基于改进粒子群参数整定方法用于数值模型仿真,智能优化模糊论域,实现PID控制器的参数调节,进而抑振修枝锯的振动;最后在Simulink和实际环境中分别进行了虚拟仿真和样机试验,验证本文提出的基于改进PSO和模糊PID方法对高枝修剪机械臂末端抑振的有效性。
1 臂架结构与工作原理
林业高枝修剪机械的臂架结构如图 1所示。臂架基座被固定在1个升降平台的回转转盘上,机械臂共3节,每节由1个关节驱动绕轴心旋转,第3节臂末端安装修枝锯。关节旋转由电动缸伸缩配合连杆动作驱动,顺序定义3个关节转角分别为1q(°)、2q(°)、3q(°),转动范围由电动缸伸长范围决定。实际系统中采用535、350、390 mm伸长量的电动缸(GL20-05型,上海光剑自动化设备有限公司),由台达ASDA-A2伺服器配伺服电机驱动,采用单向220 V AC电源供电,形成的转角范围分别为:
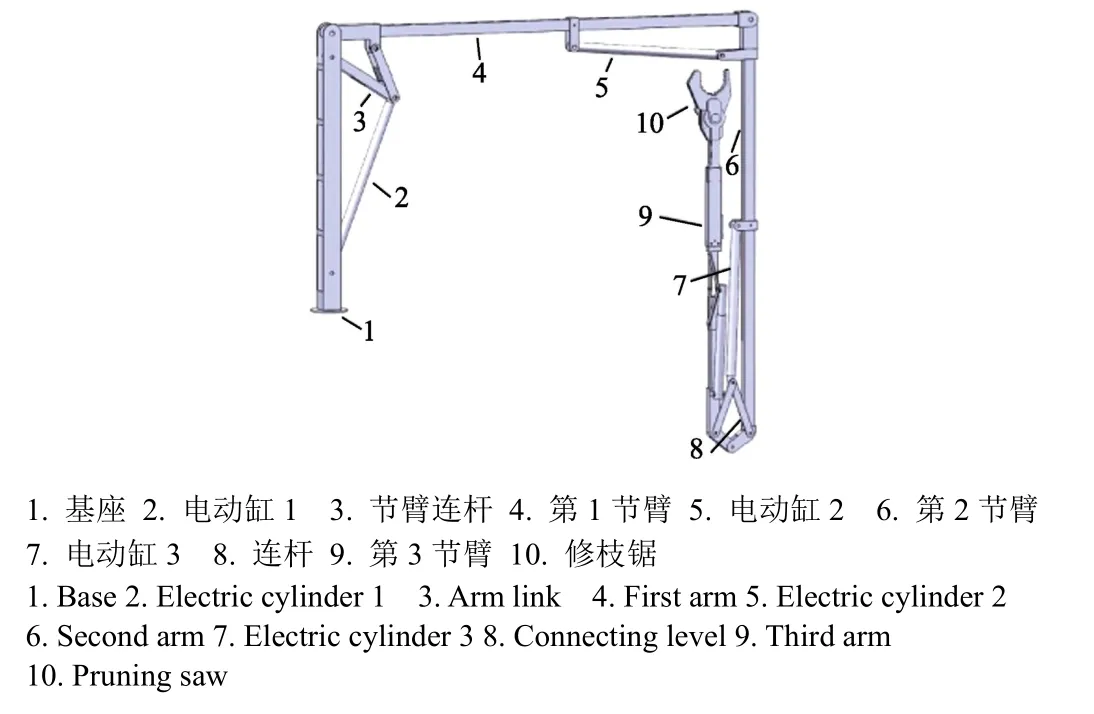
图1 臂架机械结构示意图Fig.1 Arm frame mechanical structure diagram
为了实现对 3台伺服器的协调控制,实际设计系统人机交互界面采用基于Window XP操作系统的工业平板电脑为主控单元,开发基于 MFC(microsoft foundation classes)的控制应用程序,将臂架系统的运动学和动力学正逆解算法集成,并采用RS-485总线与3台伺服器通讯,驱动伺服电机实现机械臂系统的姿态定位和作业控制,完成修枝锯自动化修枝工作。
修枝锯定位控制问题本质上是修枝臂的逆动力学控制问题,即给定机械臂工作空间末端理想位置以及机械臂的初始状态求解力矩t(t),使得实际末端位置x(t)在有限时间内逼近但由于高枝修剪机展幅宽、负载自重比大,属于刚柔耦合特性结构,存在一定的柔性。这种柔性特征易使臂架在定位作业时产生振动,不利于末端修枝锯的精确定位。
2 修枝臂柔性特征分析及建模
就其臂架系统的动力学特性而言,3个机械臂负载自重比大,容易弯曲变形,建模时必须考虑机械臂的柔性特征。但柔性体系统本身是一个非线性、时变的分布参数系统,理论上具有无限多个自由度,系统建模难度大,难以在建模精度和模型复杂性之间平衡。本节采用有限元法对臂架系统进行建模,可以将微分方程离散化,有利于采用Simulink编制程序进行计算机辅助求解和仿真,进而得到良好的控制效果和较高的控制效率。
2.1 修枝臂结构关系
机械结构决定了机械臂关节角度与电动缸长度存在一一对应,在电动缸满足功率负荷要求的前提下(样机设计之初已通过虚拟样机优化设计确定了每节臂架电动缸最大输出功率不大于0.4 kW,即能够满足各节机械臂的负载要求[11]),伸缩量及伸缩速度决定电动缸实时输出功率,也决定了关节转矩的大小,因此在采用有限元法对机械臂进行动力学建模之前,应将关节角度转换为电动缸伸长量,进而决定姿态调整时实时输出功率与电动缸伸缩速度之间的对应关系。
2.1.1 关节角θ1与电动缸1长度L1的对应关系
对第1关节几何关系进行分析,其几何结构图如图2所示。
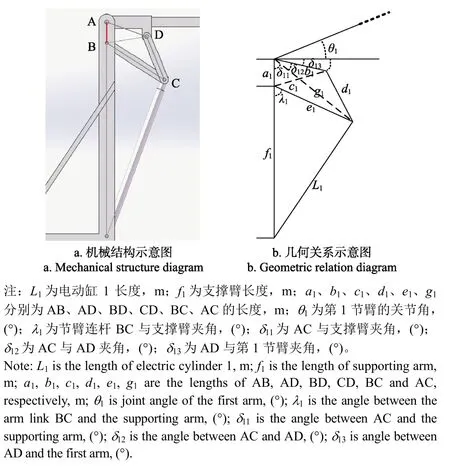
图2 第1关节几何结构示意图Fig.2 First joint geometry diagram
可以得到
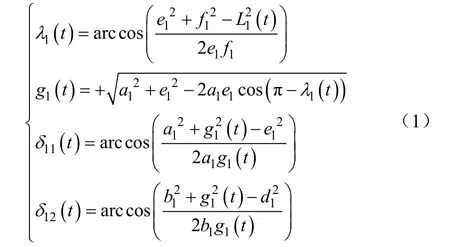
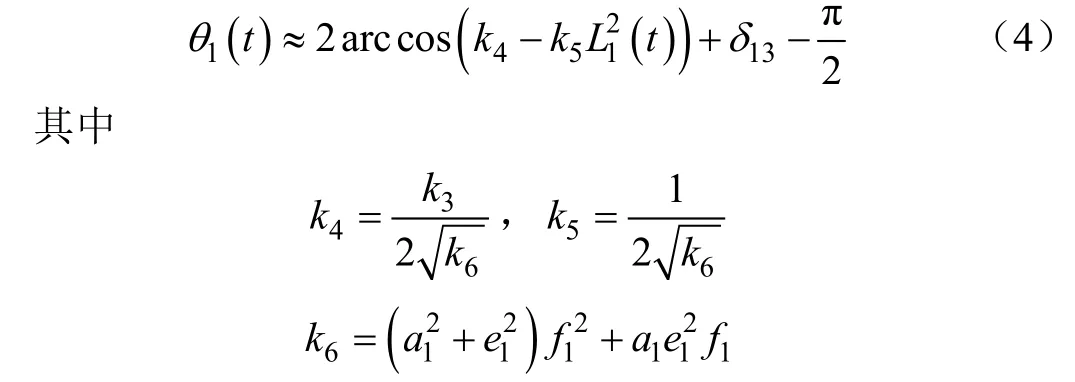
考虑到图2中d13是定角,因此机械臂1的转角为

为了方便计算,机械设计时令
整理可得

其中
2.1.2 关节角θ2与电动缸2长度L2的对应关系
对第2关节几何关系进行分析,其几何结构图如图3所示。
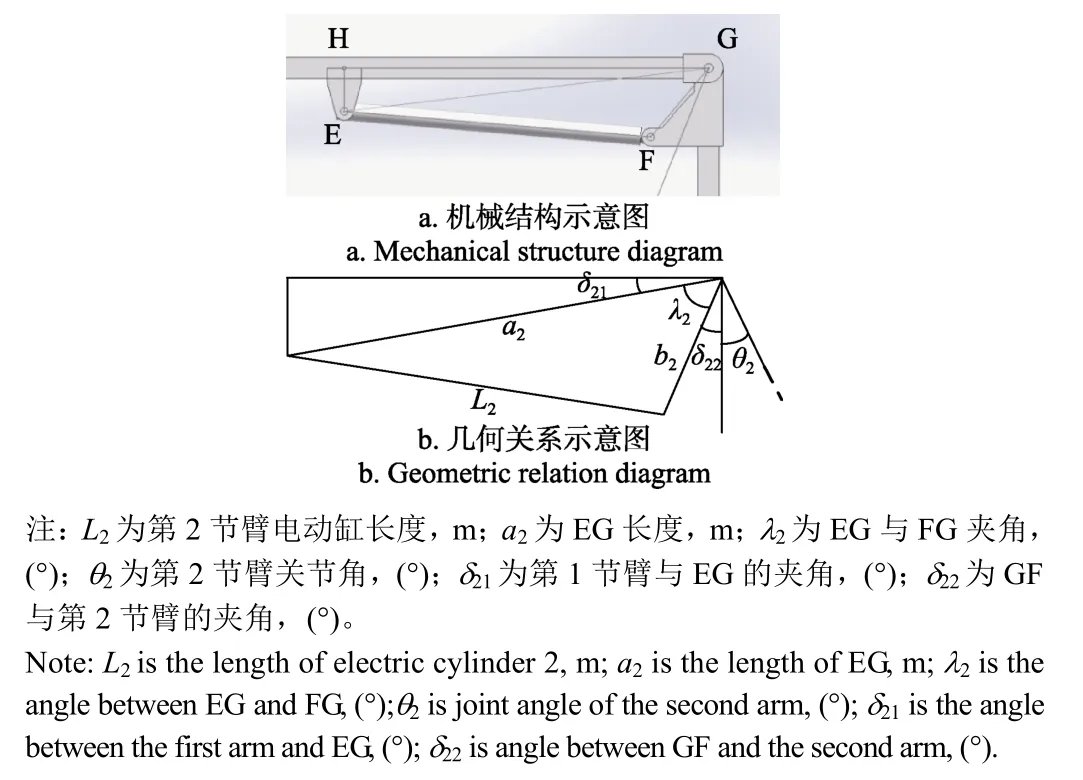
图3 第2关节几何结构示意图Fig.3 Second joint geometry diagram
可以得到

考虑到d21和d22是定角,因此机械臂在OXY坐标中的转角q2(t)为
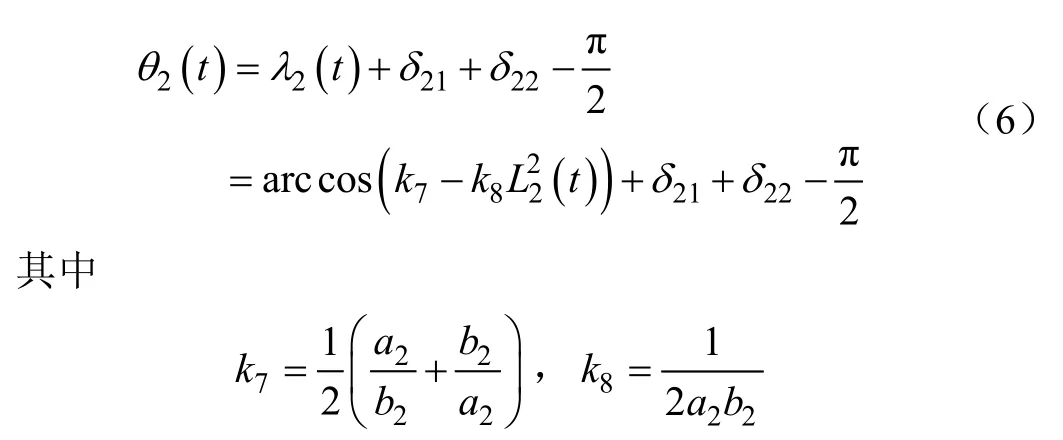
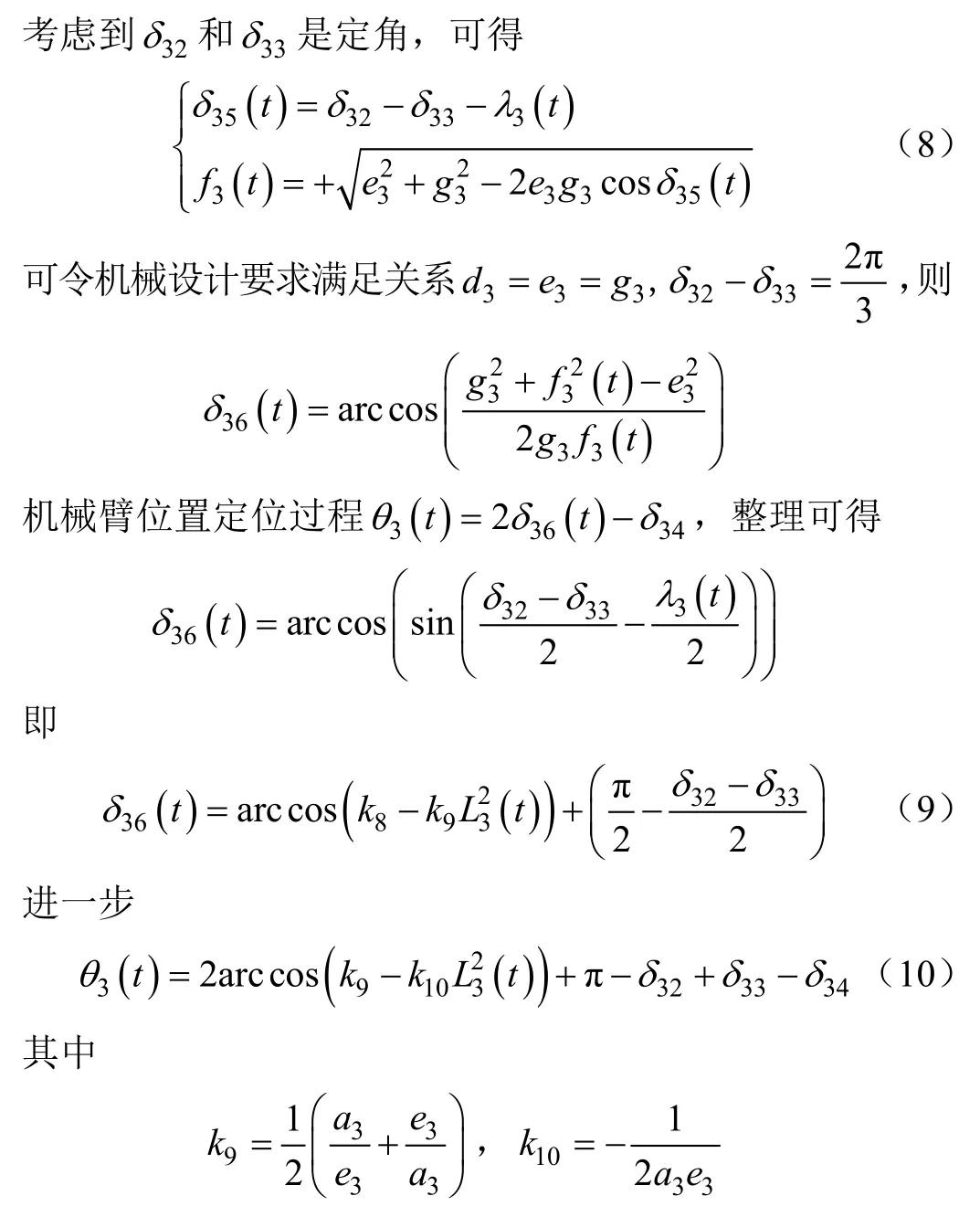
2.1.3 关节角θ3与电动缸3长度L3的对应关系
对第3节臂几何关系进行分析,其几何结构图如图4所示。
可以得到

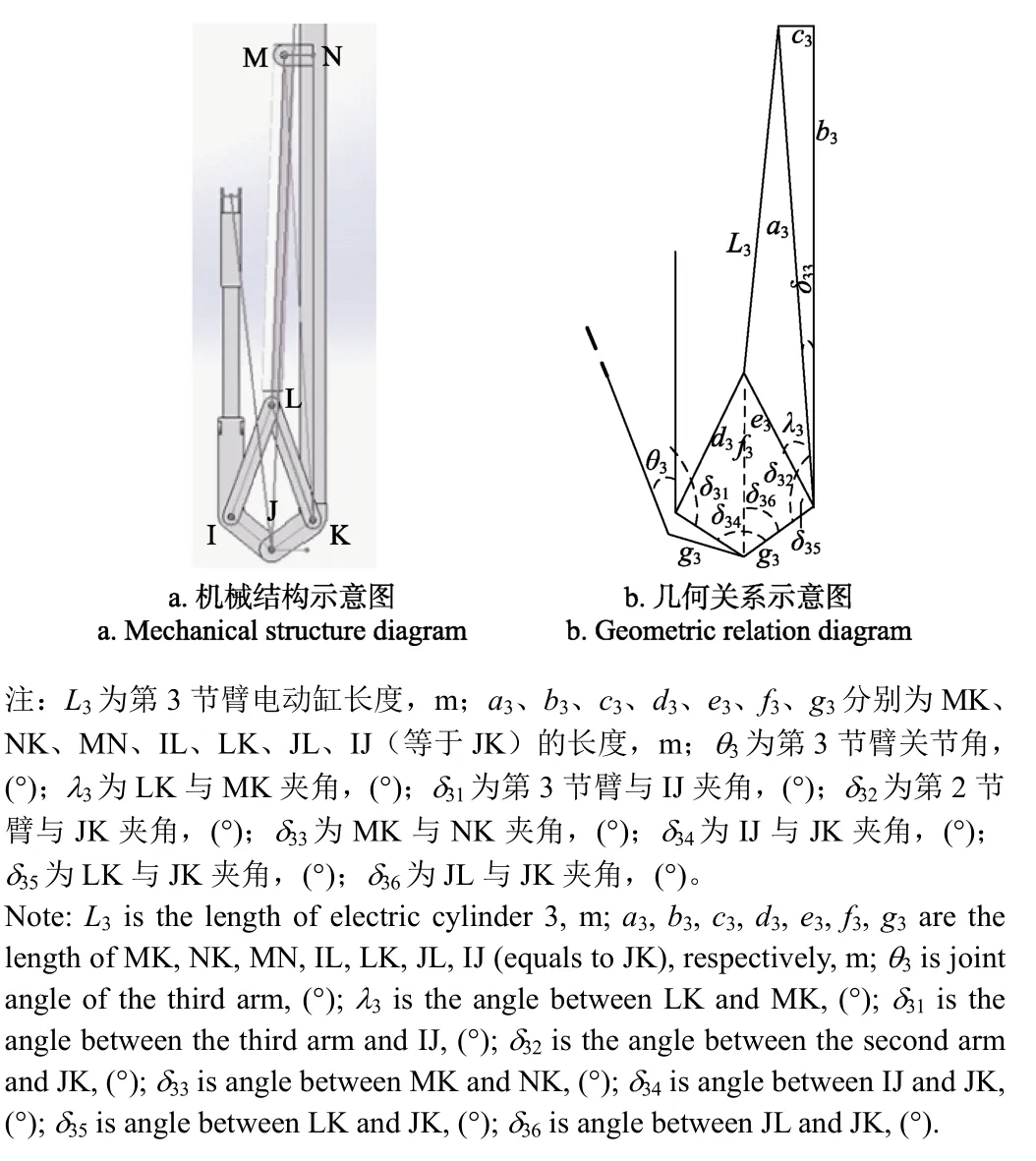
图4 第3关节几何结构Fig.4 Third joint geometry diagram
2.2 柔性特征下的动力学建模
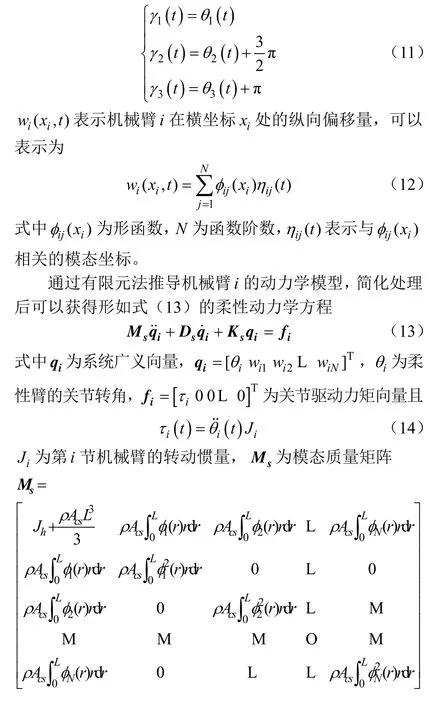
确定了机械臂关节转角与电动缸伸长量之间的关系,就能够得到机械臂输入转矩与电动缸伸缩量控制的对应关系。下面采用有限元法对臂架系统进行动力学建模。如图5所示,在机械臂i上建立旋转坐标系原点O¢i固定于机械臂之间的驱动关节中心,¢为械臂i的初始端切线方向。
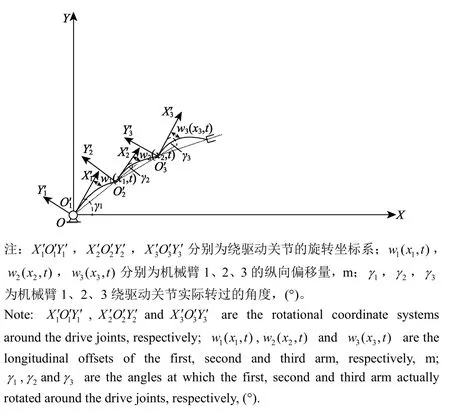
图5 柔性机械臂坐标空间Fig.5 Flexible manipulator coordinate space
图5中ig表示机械臂i绕驱动关节实际转过的角度,且容易得到
2.3 修枝臂动力学模型实现
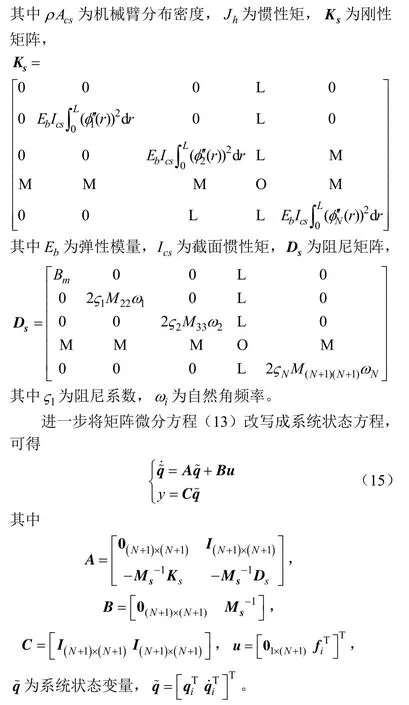
在确保电动缸功率能够满足作业要求基础上,电动缸实际输出转矩与电动缸伸长量相关并分别由式(4)、(6)、(10)、(14)给出。可以看到,尽管式(4)、(6)、(10)中关节转角与电动缸伸长量的几何关系具有相同的表达形式,且式(14)明确了输出转矩 与电动缸控制参量之间的对应关系,但由于几何关系式本身是超越方程,求导之后计算尤为复杂。此外,有限元模型本身构建也较为繁琐,计算量大,这些因素都影响了对模型进行数值求解。Simulink作为MATLAB最重要的组件之一,提供了一个动态系统建模、仿真和综合分析的集成环境,不需要大量编写程序就能够构造出复杂系统,非常适合此类系统的建模和仿真计算[13-16]。利用 Simulink库中提供的基本模块,分别构造电动缸伸长量到机械臂转矩 的Simulink关系图和机械臂Simulink有限元模型如图6所示。
在图6a中,封装后In1输入端为来自电动缸i的长度Li(t),Out1输出端为对应臂i的输出转矩ti(t)。图6b为包含30个有限元的柔性臂模型(图中省略了大部分重复单元),每个有限元模型具有图 6c所示的结构,由式(13)表述的机械臂分布式参数可以根据表 1中实际参数在Solid HalfBeam单元中进行设置。
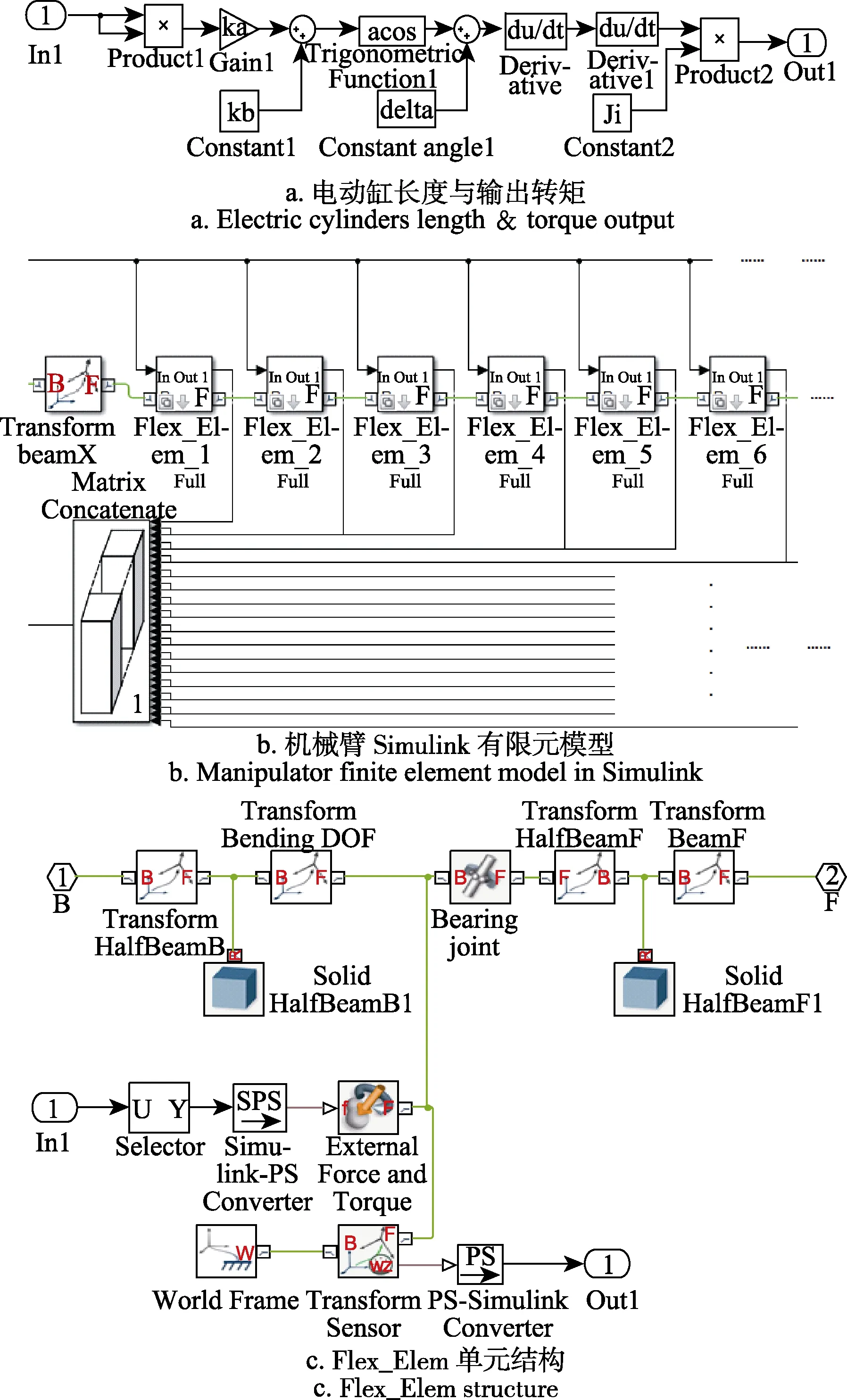
图6 Simulink模型Fig.6 Simulink model
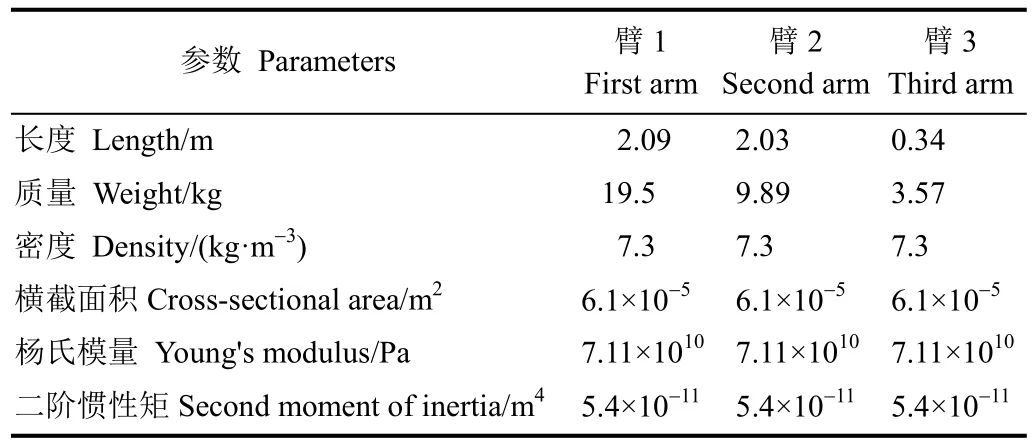
表1 高枝修剪机各节臂参数Table 1 Arm parameters of high-branch pruning manipulator
3 机械臂主动抑振算法及控制器设计
机械臂系统模型的输入输出分别是电动缸长度和位置、转角,机械臂控制是给定目标位置前提下,通过检测位置、转角偏差反馈到基于改进粒子群算法(particle swarm optimization,PSO)的模糊PID控制器输入端,并最终由电动缸伸缩量转化为关节转矩控制机械臂姿态。
本文机械臂控制算法设计采用的是一类基于改进粒子群的模糊 PID控制算法。PID控制是工程实际中应用最为广泛的调节器之一,具有结构简单、参数易整定等优点[17-20]。但对于大干扰、高度非线性的柔性机械臂系统,传统 PID不能随系统参数变化实时调节,无法达到预期的控制目标,甚至造成系统发散。考虑到修枝机实际作业时姿态调整区域有限[11],本文采用一种基于改进粒子群离线优化算法的模糊 PID方法设计控制器,通过仿真模型和离线优化技术,对 PID参数进行整定,并将优化得到的控制参数应用于实际系统,进而有效抑制机械臂振动,实现末端修枝锯的准确定位。
3.1 基于改进粒子群的优化算法
粒子群算法属于进化算法的一种[21-25],是从随机解出发,通过迭代寻找最优解并通过适应度来评价解的品质。在N维空间中,粒子i的空间位置
给定一个目标函数,每个粒子的位置对应一个由该函数决定的适应值fi。粒子按照式(14)来更新自己的位置和速度

Clerc[26]在研究粒子群优化算法时,提出了收敛因子的概念
研究表明算式(17)可以达到较好的收敛性能,但由于过快收敛,有些求解过程中无法到达全局最优。为了使粒子能够逃出局部最优,本文在算法具体实现时,在当前迭代周期内设定一个最小速度门限值当持续小于时,则可以认为粒子陷入了局部最优。此时应当重启粒子,加大粒子速度,促使粒子飞出局部最优。很明显,迭代即将结束时算法已经趋近于全局最优,此时应当取消速度门限限制,防止粒子产生不必要的外逃。
此外,在适应度函数的选择上,本文选择的适应度函数为时间绝对偏差积分。为了抑制控制输入产生突变,在适应度函数中增加了输入变化量的绝对值项,得到

3.2 机械臂控制器设计
模糊 PID已被应用到很多领域,但模糊器的设计一般还是以经验为主,在非线性较强的系统中需要不断尝试以获得更好的控制效果[27-30]。本文所采用的模糊 PID参数整定方法本质上是一种基于粒子群算法的模糊隶属函数优化方法,通过改进粒子群优化算法可以减少模糊PID设计过程中的工作量,并在模型不确定的情况下提高系统的控制性能。
控制器设计利用模糊规则建立误差e(t),误差变化率(t)与比例参数kp、积分参数ki、微分参数kd之间关系。在改进粒子群算法的基础上,通过将对系统的误差作为粒子群优化算法的评价函数即适应度函数输入,计算出适应度函数的数值,然后根据函数的适应度来调整模糊论域的量化范围,进而通过模糊器调整PID的3个参数,使系统的控制性能达到最优。设计控制器的系统结构如图7所示。
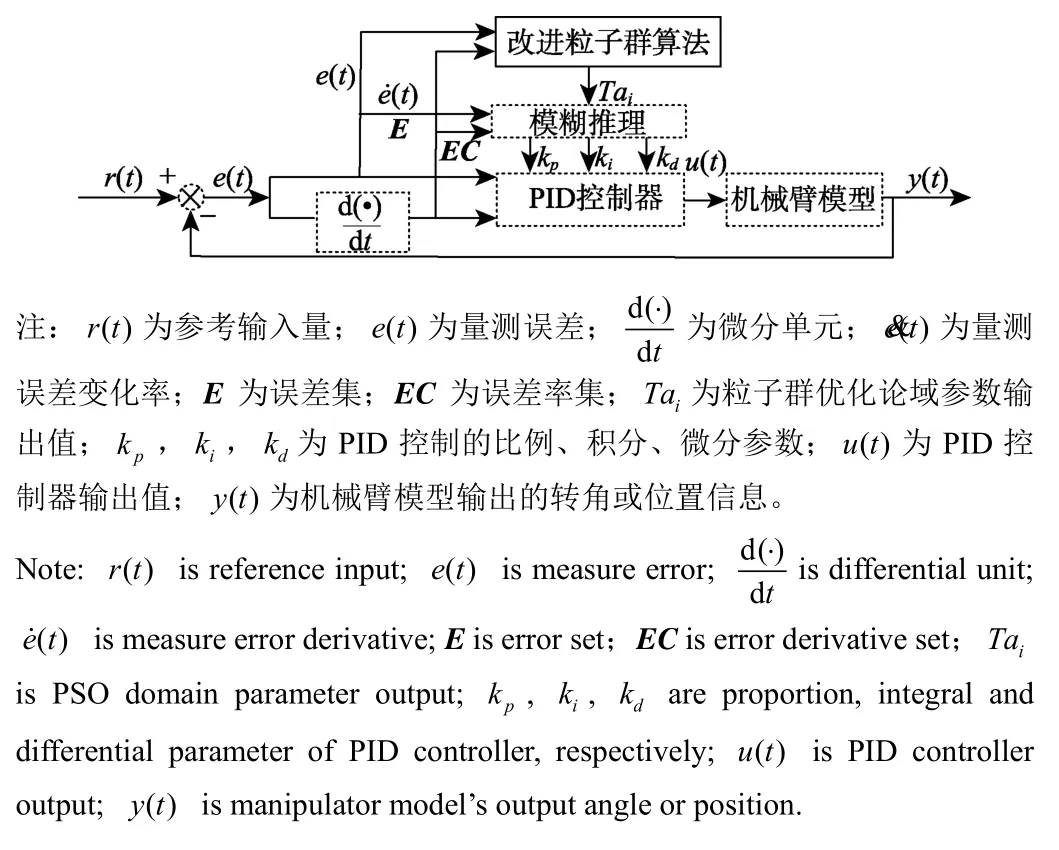
图7 控制器设计结构示意图Fig.7 Controller design structure diagram
严格来讲,柔性机械臂是无限自由度系统,考虑到控制成本和算法复杂度,现实中很难,也没有必要对式(13)中所有状态量进行监控。通过监测转轴转角和末端位置状态信息,利用转角及位置偏差量进行机械臂姿态控制显然更有应用价值。其中,系统的转轴转角可以由关节角计算得到,而末端状态可以通过对加速度传感器的信息积分而得。因此,轴的偏角误差或末端位移误差e及其变化率都可以作为有效输入量,输出量则为转矩的大小。模糊控制的模糊关系可以用式(19)和式(20)计算得到,即

其中Ei为误差集,ECj为误差率集,Uij为输出集,Ri为分模糊关系,Rr为总模糊。
为了建立机械臂的模糊控制规则,将输入变量和输出变量的语言值分成5个子集,定义为NB-负大、NS-负小、ZE-零、PS-正小、和PB-正大,即
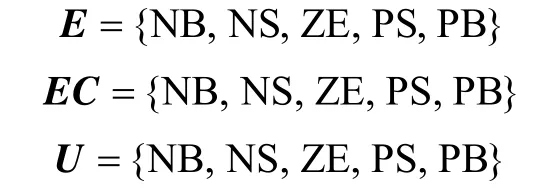
为模糊语言变量选取相应的隶属度函数,本文各变量均选择工程上常用的三角形隶属函数,每个模糊变量在其论域内可以分成相应的 5个量化区间,由于加入了离子优化算法,所以每个论域的实际量化区间为
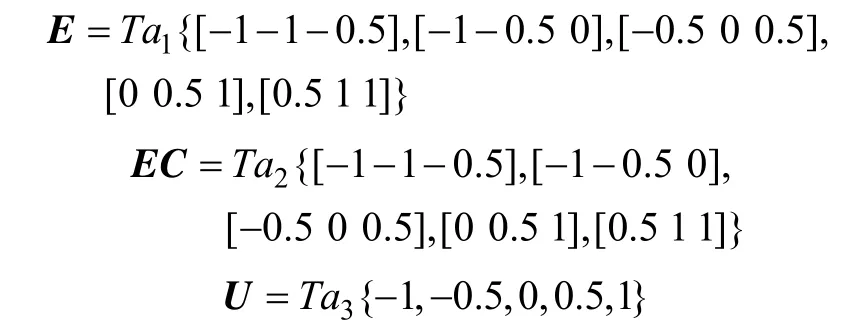
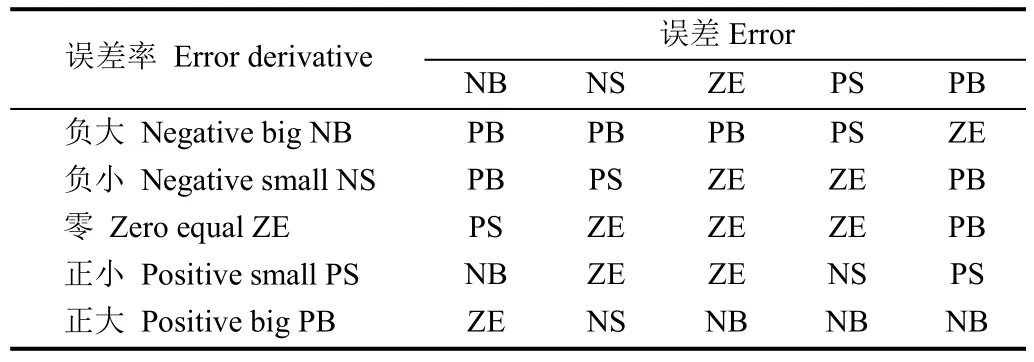
表2 不同误差下输出的模糊规则Table 2 Output fuzzy rule with defferent errors
4 系统试验与验证
4.1 仿真试验
在Simulink中搭建仿真试验环境,构造如图6所示的伸长量与转矩对应关系,计算式(4)、(6)、(10)中的系数为

构造30个有限元的机械臂模型如图6b,模型输入为转矩 ,通过有限元模型可以获得机械臂的中间变量,但如前说述只有转角和末端状态参与运算。图8a为系统的控制结构图,其中Fuzzy System with PSO是M语言实现的改进粒子群模糊算法函数,反馈变量经过与输入参考变量比较后得到误差及其变化率,并作为带粒子群优化的模糊控制器的输入。这里设定粒子优化算法中迭代次数30,粒子数10,优化范围0~1 000。图8b为PID控制子系统的内部结构图,由于实际误差有转角和位置两组且具有耦合性,这里通过两个模块对两组变量进行解耦,分别计算其输出值,再通过其线性组合得到整个控制器的输出,即

式中w1,w2为加权系数,这里取w1=w2= 0.5。
经过数值模拟仿真得到的模糊 PID控制器参数自整定曲线如图8c所示,进而得到系统单位阶跃响应曲线如图8d所示,可以看到经过改进粒子群算法迭代优化后系统的阶跃响应曲线超调量小,上升时间短,调整时间小,没有稳态误差,表明控制器系统性能好,能够达到较为理想的控制效果。
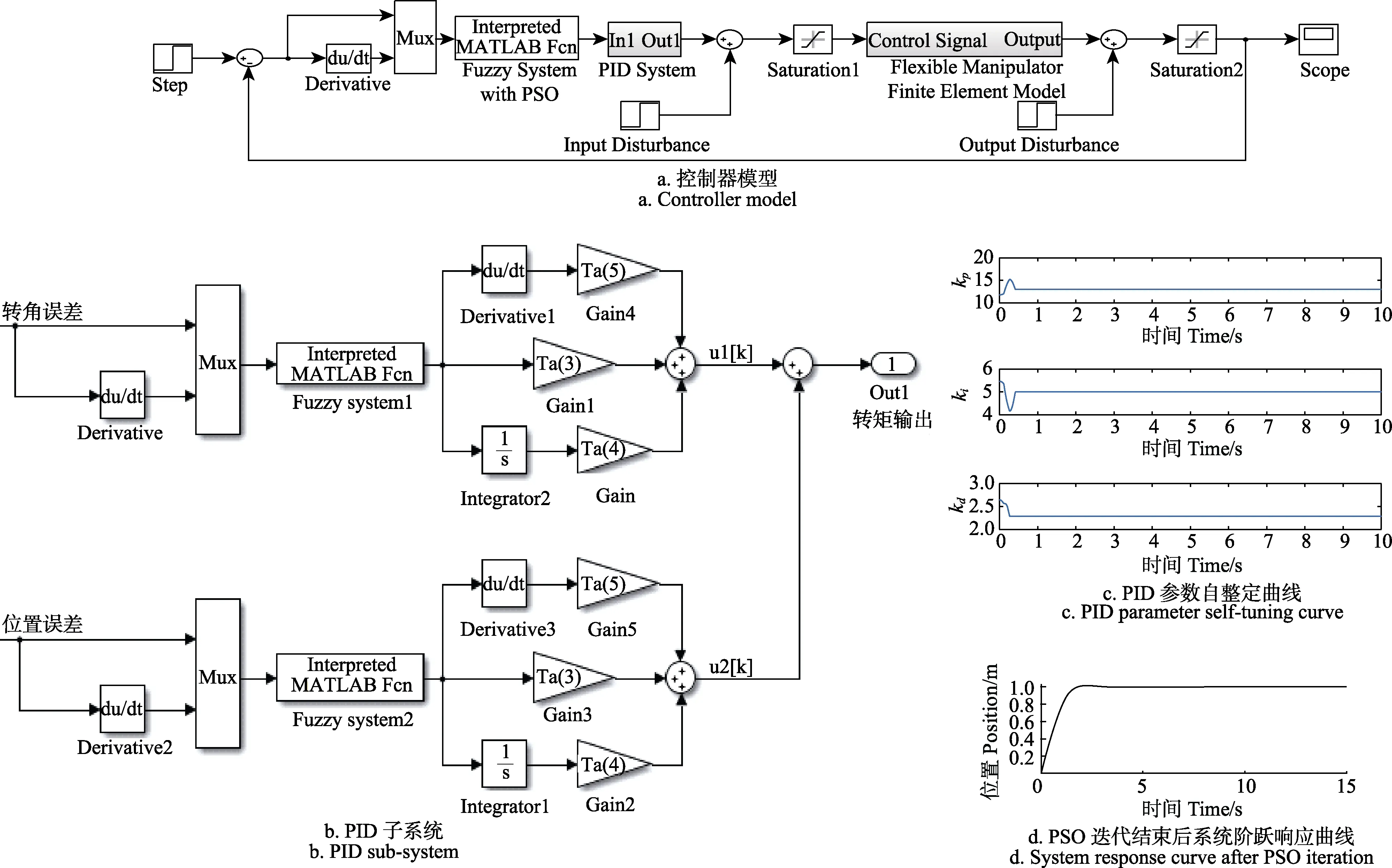
图8 Simulink控制仿真Fig.8 Simulink control simulation
4.2 样机试验
在数值仿真试验的基础上,将优化后的控制算法应用于试验样机。样机试验在山东农业大学校内进行,将高枝修剪机由动力机械牵引至开阔区域,对高度8~10 m的树木侧枝进行剪枝作业。试验过程首先将机械臂架展开,通过控制器调整机械臂的姿态对准待修树枝,在锯切定位过程中,分别测得使能、禁用算法 2种情况下末端修枝锯的振动幅度和稳定时间,进行结果对比分析,并检测机械修枝完成度。
试验主要以末端修枝锯为测量对象,修枝锯振幅通过在修枝锯上固定AKE392B振动传感器(加速度测量量程为±16g,g=9.8 m/s2),通过加速度数字积分的方式得到。控制器位于控制箱中,集成本文前述基于改进粒子群优化后的模糊 PID控制算法。一次定位活动中,当修枝锯振幅小于最大振幅5%时,定义为修枝锯进入稳态。实际臂架系统、控制箱和传感器固定位置如图9a所示。图9b为修枝机作业试验现场,图9c为修枝锯锯切定位作业,图9d为完成修枝作业后的树枝茬口。可以看到,样机顺利完成了修枝作业,经测量,修剪树枝为直径3.7 cm的侧枝,修剪的树枝切口平整,修枝效果符合要求。

图9 样机试验Fig.9 Prototype experiment
将采集计算得到的末端定位数据进行滤波、拟合处理,分别绘制控制算法禁用和使能时机械臂末端修枝锯定位误差和误差变化率曲线,如图10所示。分别对比图10a和图10c,图10b和图10d,可以看到算法禁用时定位误差及其误差变化率曲线震荡剧烈,且5 s后仍有小幅震荡,不易进入稳态,而在本文设计控制器的作用下,末端修枝锯能够在定位过程中较短时间内能进入稳态,定位过程更加平稳。由图10c、10d显示,末端修枝锯在1s左右时振幅衰减至峰值的5%以下,震荡调整的时间小于1s,实现了较为有效的抑振效果,能顺利将树枝送入锯切口,提高了作业效率,并最终实现了树枝修剪工作。

图10 控制算法禁用和使能时末端定位误差及其变化率曲线Fig.10 End-point positioning error & change rate curves with control algorithm disabled and enable
5 结 论
高大树木修枝是林业生产中一项重要工作,在林业生产管理中占有非常大的比例。本文在前期设计、试制高枝修剪机械基础上,进一步完成了以下工作:
1)针对已经制作的高枝修剪机械样机,对其臂架系统进行了柔性分析,分析了机械臂几何结构,利用有限元法对机械臂进行动力学建模,并在Simulink中实现了其动力学模型,并进行了仿真实验。
2)设计了基于改进粒子群的优化算法的模糊PID控制器,对定位时末端修枝锯振幅进行抑制,从而使修枝锯震荡调整时间从大于5 s优化为小于1s,使之较快进入稳态,较为有效的改善了末端定位产生的振动情况。
3)经过以上分析和设计,提高了剪枝锯的定位精度和速度,优化了整个机械的动态性能,确保了对高枝修剪机械的灵活操控。通过对提出的主动控制算法进行仿真分析和样机试验,试验结果验证了算法的可靠性,为进一步发展高枝修剪机械积累了宝贵经验。
[1]张秀秀,曹帮华,张晓文,等. 杨树修枝理论和技术研究进展[J]. 河北林果研究,2010,25(3):235-239.Zhang Xiuxiu, Cao Banghua, Zhang Xiaowen, et al. Progress in research on theory and technology of poplar pruning[J].Hebei Journal of Forestry and Orchard Research, 2010, 25(3):235-239. (in Chinese with English abstract)
[2]王春胜,赵志刚,吴龙敦,等. 修枝高度对西南桦拟木蠹蛾为害的影响[J]. 西北林学院学报,2012,27(6):120-123.Wang Chunsheng, Zhao Zhigang, Wu Longdun, et al. Effects of pruning height on trunk borer (arbela spp.) damage to betula alnoides[J]. Journal of Northwest Forestry University,2012, 27(6): 120-123. (in Chinese with English abstract)
[3]丁思一,佘济云,杨庆朋,等. 间伐和修枝对杉木人工林土壤微生物量碳和酶活性的影响[J]. 中南林业科技大学学报,2015,35(6):75—79.Ding Siyi, She Jiyun, Yang Qingpeng, et al. Effects of thinning and pruning on soil microbial biomass carbon and soil enzyme activities in chinese fir plantation[J]. Journal of Central South University of Forestry & Technology, 2015,35(6): 75-79. (in Chinese with English abstract)
[4]顾正平,沈瑞珍. 国内外园林绿化机械现状与发展趋势[J].林业机械与木工设备,2004,32(2):4-7.Gu Zhengping, Shen Ruizhen. Present status and prospect of gardening machines at home and abroad[J]. Forestry Machinery & Woodworking Equipment, 2004, 32(2): 4-7.(in Chinese with English abstract)
[5]贾启明,马秀娟,张大海. 关于城市高大树木修剪机械化的探讨[J]. 辽宁林业科技,2001,5(3):43-44.Jia Qiming, Ma Xiujuan, Zhang Dahai. Discussion on the mechanization of pruning tall trees in cities[J]. Journal of Liaoning Forestry Science & Technology, 2001, 5(3): 43-44. (in Chinese with English abstract)
[6]李世葳,王述洋,王慧,等. 树木整枝修剪机械现状及发展趋势[J]. 林业机械与木工设备,2008,36(1):15-16.Li Shiwei, Wang Shuyang, Wang Hui, et al. Present status and prospect of tree pruning machinery[J]. Forestry Machinery & Woodworking Equipment, 2008, 36(1): 15-16.(in Chinese with English abstract)
[7]辛继红,汤兴初,全腊珍,等. 背负式可调高枝修剪机的研制[J]. 湖南农业大学学报:自然科学版,2003,29(1):63-64.Xin Jihong, Tang Xingchu, Quan Lazhen, et al. On compact adjustable tree pruner[J]. Journal of Hunan Agricultural University: Natural Sciences, 2003, 29(1): 63-64. (in Chinese with English abstract)
[8]杨乾华,向北平. 电动绿篱修枝机的结构设计与研究[J].林业科技,2010,35(1):48-50.Yang Qianhua, Xiang Beiping. Structural design and research on electricaly operated hedgerow pruner[J]. Forestry Science& Technology, 2010, 35(1): 48-50. (in Chinese with English abstract)
[9]焦恩璋,张建红. 车载式高枝修剪机的研制[J]. 南京林业大学学报,1990,14(1):63-67.Jiao Enzhang, Zhang Jianhong. A study of lorry-mounted highlift pruner[J]. Journal of Nanjing Forestry University,1990, 14(1): 63-67. (in Chinese with English abstract)
[10]3SG-8型全液压修枝整形机[J]. 农业机械,1981(2):10-11.3SG-8 full hydraulic pruning machine[J]. Agricultural Machinery, 1981(2): 10-11.
[11]陈延甫. 高大树木修枝机械的设计与优化分析[D]. 泰安:山东农业大学,2016.Chen Yanfu. Design and Optimization Analysis of Tall Trees Pruning Machine[D]. Taian: Shandong Agricultural University, 2016. (in Chinese with English abstract)
[12]苑进,武军,曹邦华,等. 一种杨树自动修枝装置:2013 103070033B[P]. 2013-12-11.
[13]李伯虎,柴旭东,朱文海,等. 现代建模与仿真技术发展中的几个焦点[J]. 系统仿真学报,2004,16(9):1871-1877.Li Bohu, Chai Xudong, Zhu Wenhai, et al. Some focusing points in development of modern modeling and simulation technology[J]. Journal of System Simulation, 2004, 16(9):1871-1877. (in Chinese with English abstract)
[14]王金武,张春凤,周文琪,等. 基于 MATLAB仿真的非规则齿轮行星系扎穴机构的优化设计[J]. 农业工程学报,2016,32(3):22-28.Wang Jinwu, Zhang Chunfeng, Zhou Wenqi, et al.Optimization design of non-circular planetary gear trains pricking hole mechanism based on MATLAB[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of theCSAE), 2016, 32(3): 22-28.(in Chinese with English abstract)
[15]余强毅,吴文斌,陈羊阳,等. 农作物空间格局变化模拟模型的 MATLAB实现及应用[J]. 农业工程学报,2014,30(12):105-114.Yu Qiangyi, Wu Wenbin, Chen Yangyang, et al. Model application of an agent-based model for simulating crop pattern dynamics at regional scale based on MATLAB[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(12):105-114. (in Chinese with English abstract)
[16]孙韩,朱军. MATLAB/Simulink在动态系统仿真中应用研究[J]. 办公自动化,2015(17):42-44.Sun Han, Zhu Jun. Application of MATLAB/Simulink dynamic system simulation[J]. Office Automation, 2015(17):42-44.(in Chinese with English abstract)
[17]郭娜,胡静涛. 基于Smith-模糊PID控制的变量喷药系统设计及试验[J]. 农业工程学报,2014,30(8):56-64.Guo Na, Hu Jingtao. Design and experiment of variable rate spaying system on Smith-Fuzzy PID control[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2014, 30(8): 56-64. (in Chinese with English abstract)
[18]樊国平. 智能PID控制系统的设计与研究[D]. 杭州:浙江工业大学,2005.Fan Guoping. Design and Research on Intelligent PID Control System[D]. Hangzhou: Zhejiang University of Technology, 2005. (in Chinese with English abstract)
[19]仇成群,刘成林,沈法华,等. 基于Matlab和模糊PID的汽车巡航控制系统设计[J]. 农业工程学报,2012,28(6):197-202.Qiu Chengqun, Liu Chenglin, Shen Fahua, et al. Design of automobile cruise control system based on Matlab and fuzzy PID[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(6): 197-202. (in Chinese with English abstract)
[20]宁宗夏. PID参数对控制系统稳定性影响的研究[D]. 西安:西安电子科技大学,2008.Ning Zongxia. Study on Stability of PID Control System[D].Xi’an: Xidian University, 2008. (in Chinese with English abstract)
[21]董全成,冯显英. 基于自适应模糊免疫PID的轧花自动控制系统[J]. 农业工程学报,2013,29(23):30-37.Dong Quancheng, Feng Xianying. Cotton-gin automation by using adaptive fuzzy immune PID controller[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2013, 29(23): 30-37. (in Chinese with English abstract)
[22]金欣磊. 基于 PSO 的多目标优化算法研究及应用[D]. 杭州:浙江大学,2006.Jin Xinlei. Pso-based Multi-objective Optimization Algorithm Research and its Applications[D]. Hangzhou:Zhejiang University, 2006. (in Chinese with English abstract)
[23]雷秀娟,付阿利,孙晶晶. 改进PSO算法的性能分析与研究[J]. 计算机应用研究,2010,27(2):453-458.Lei Xiujuan, Fu Ali, Sun Jingjing. Performance analyzing and researching of improved pso algorithm[J]. Application Research of Computers, 2010, 27(2): 453-458. (in Chinese with English abstract)
[24]陈啸,王红英,孔丹丹,等. 基于粒子群参数优化和 BP神经网络的颗粒饲料质量预测模型[J]. 农业工程学报,2016,32(14):306-314.Chen Xiao, Wang Hongying, Kong Dandan, et al. Quality prediction model of pellet feed basing on BP network using PSO parameters optimization method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(14): 306-314. (in Chinese with English abstract)
[25]胡旺,Gary G. Yen,张鑫. 基于Pareto熵的多目标粒子群优化算法[J]. 软件学报,2014,25(5):1025-1050.Hu Wang, Gary G. YEN, Zhang Xin. Multiobjective particle swarm optimization based on pareto entropy[J]. Journal of Software, 2014, 25(5): 1025-1050. (in Chinese with English abstract)
[26]Clerc M. The swarm and the queen: Towards a deterministic and adaptive particle swarm optimization[C]// Proc. of the ICEC. 1999: 1951-1957.
[27]徐军. 基于模糊控制的剪枝机器人驱动系统的研究[D].哈尔滨:东北林业大学,2011.Xu Jun. Study on the Fuzzy-controlled Driving System of Plantation Pruning Robot[D]. Harbin: Northeast Forestry University, 2011. (in Chinese with English abstract)
[28]王述彦,师宇,冯忠绪. 基于模糊PID控制器的控制方法研究[J]. 机械科学与技术,2011,30(1):166-172.Wang Shuyan, Shi Yu, Feng Zhongxu. A method for controlling a loading system based on a fuzzy PID controller[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(1): 166-172. (in Chinese with English abstract)
[29]崔建弘,寇雪梅,杨静宜,等. 基于模糊PID参数整定的收获机前进速度控制优化[J]. 农机化研究,2016,7:75-79.Cui Jianhong, Kou Xuemei, Yang Jingyi, et al. Forward speed control optimization of the harvester based on parameter tuning of fuzzy PID[J]. Journal of Agricultural Mechanization Research, 2016, 7: 75-79. (in Chinese with English abstract)
[30]李加念,洪添胜,冯瑞珏,等. 基于模糊控制的肥液自动混合装置设计与试验[J]. 农业工程学报,2013,29(16):22-30.Li Jianian, Hong Tiansheng, Feng Ruijue, et al. Design and experiment of automatic mixing apparatus for liquid fertilizer based on fuzzy control[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(16): 22-30. (in Chinese with English abstract)
Experiment and vibration suppression algorithm for high-branch pruning manipulator based on fuzzy PID with improved PSO
Li Yang1,2, Hou Jialin1,2※, Yuan Jin1,2, Zhao Xinxue1, Liu Xuemei1,2, Zhang Li3
(1.College of Mechanical & Electronic Engineering, Shandong Agricultural University, Tai'an271018,China;2.Shandong Provincial Key Laboratory of Horticultural Machinery and Equipment, Tai’an271018,China;3.Department of Resources and Civil Engineering, Shandong University of Science and Technology, Tai'an271019,China)
Pruning trees is an important work in forestry production, which plays an important role on the growth of trees and timber and the forest fire prevention. However, domestic and foreign high-altitude pruning machinery is still in its infancy,whose working height is generally less than 8 m and is not high flexible. It is difficult to effectively improve work efficiency in pruning high branches. In this paper, a simple, low-cost mobile tall tree pruning machine was designed, which could be easily towed to the forest area, and prune high branches within 15 m height. This machine had the working radius of 6 m and the maximum pruning diameter of 10 cm. However, in the process of sawing and positioning, due to the long arm span and high load weight ratio, there were obviously flexible features for its arms, and the end-effector (pruning saw) was easy to vibrate during its positioning. Thus, it was difficult to achieve fast and accurate positioning, as well as fix the branch to be cut. Aiming to the above problems, this paper analyzed the flexible characteristics of the boom system with the boom display and the high load weight ratio. On this basis, the vibration suppression control method of the end of pruning saws was investigated to achieve the rapid and accurate positioning of the end of pruning saws. In this paper, focusing the flexible characteristics of the manipulator and the vibration suppression of the end-point, based on the introduction of the boom structure and working principle, we analyzed the impact of flexible features on the positioning of the end of pruning saws by geometric derivation,and the FEM (finite element modeling) was used for the dynamics analysis of the boom system. And the fuzzy PID (proportion,integral, derivative) controller was designed based on an improved PSO (particle swarm optimization) algorithm, in order to realize the active vibration suppression control of the end of the actuator. In the designed fuzzy PID controller, the improved PSO algorithm was used on the numerical simulation model to optimize the fuzzy domain intelligently. The parameters of the PID controller were adjusted and the vibration of the pendulum saw was suppressed, and the simulation and experimental verification were performed in the SIMULINK environment and a prototype system, respectively. The experimental results showed that the design of the tall trees pruning manipulator control method could realize the end-point vibration suppression,and the pruning saw could be accurately positioned into the steady state during the localization process in a short period of time. The actual measured data showed that the overshoot was less than 50% under the open-loop state, the amplitude decay was less than 5% of the peak after 1 s, the vibration adjustment time was less than 1 s, and the system could achieve steady state, and achieve a more effective vibration suppression effect. Verification results showed that under the effect of the control algorithm and the controller designed in this paper, the end-effector could be stabilized in a short time after the positioning to achieve better active vibration suppression effect. The control algorithm improved the pruning saw’s positioning accuracy and speed, and optimized the dynamic performance of the entire machinery to ensure the flexible control of high branch pruning machinery. Through the simulation analysis and prototype test using the proposed active control algorithm, the results verify the reliability of the algorithm and accumulate the valuable experience for the further development of the high branch pruning machinery.
manipulators; forestery; vibration control; vibration suppression; flexible Features; improved PSO; fuzzy PID
10.11975/j.issn.1002-6819.2017.10.007
S776.27+4
A
1002-6819(2017)-10-0049-10
2016-09-13
2017-04-16
国家自然科学基金项目(51675317、51475278);“十二五”国家科技支撑计划资助项目(2014BAD08B01-2);山东科技发展计划项目(2013GNC11203、2014GNC112010);山东省农机装备研发创新计划项目(2015YB201)
李 扬,男,山东泰安人,主要从事嵌入式系统、智能农机装备方向研究。泰安 山东农业大学机械与电子工程学院,271018。
Email:mtlyab@sdau.edu.cn
※通信作者:侯加林,男,山东泰安人,博士,教授,主要从事农业电气化与自动化方向研究。泰安 山东农业大学机械与电子工程学院,271018。
Email:jlhou@sdau.edu.cn
猜你喜欢
西北林学院学报(2022年1期)2022-02-10
湖南林业科技(2021年3期)2021-07-02
作文小学中年级(2020年5期)2020-12-29
作文·小学低年级(2020年5期)2020-10-09
鸭绿江·华夏诗歌(2020年6期)2020-08-06
东坡赤壁诗词(2020年3期)2020-07-04
中国工程机械学报(2019年6期)2019-12-31
东坡赤壁诗词(2019年3期)2019-07-05
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23