
无线智能探测船的控制和信息采集
2017-07-11 08:03晏宜曦周冉旸成定航陈明明
电脑知识与技术 2017年15期
关键词:智能控制
晏宜曦 周冉旸 成定航 陈明明

摘要:随着工业进步和社会发展,水污染亦日趋严重,受污染的水域中除重金屬外,还含有很多农药、化肥、洗涤剂等有害残留物。为了解水质,拟设计一种可以携带深水采样器、水温和PH采样传感器的小型智能探测船。同时,在沼泽地、内陆湖泊等一些大型船只无法工作的环境勘探中,科考团队也急需要一批具有一定人工智能的遥控探测船,以减少他们在野外勘探的工作量、增加工作的安全性。
关键词:FPGA;ZigBee;水样采集;智能控制;探测船
本设计所要研发的无线智能探测船正是在广泛研究相关技术和国内外设计方案的基础上提出的。本设计利用ZigBee短距离无线通信技术进行数据传输,大大减少了系统的设备量,而且使系统安放灵活,便于移动;采用FPGA开发平台,设计出具有优良人际功效、智能控制的无线探测船。FPGA作为整个系统的监控中心,负责对系统中各个节点采集到的数据进行汇总,并对整个系统进行智能控制。该系统操作简单,工作稳定可靠,快速高效,具有广阔的应用前景。
1系统总体设计
无线智能探测船系统由两大部分组成,即远程无线控制中心和智能探测船,拥有无线射频远程数传模块、基于自适应模糊HD算法的船体控制模块、温湿度探测模块和舵机控制模块、以及LCD显示。
通过远程无线控制中心,对探测船进行有效的运行控制和科考活动,同时探测船不断地将探测船的船体运行状况、船载各模块工作状况及各科考传感器采集的数据实时传递给远程无线控制中心。根据船体各部分状况传感器采集相关数据,FPGA通过自适应模糊HD算法对直流电机、方向舵进行精确控制,确保船体的稳定性和安全性。
1.1系统设计方案
各子模块的实现方法:
本设计在船体结构方面为了保持航行与工作的稳定,船的最高航速6km/h。船体尺寸为500*160*130毫米,以较宽的船体来承受现实环境中较大风浪的情况,上盖可以拆卸,能获得较大的装载空间。为了节省时间和成本,本设计采用的船只为市场上性价比较好的遥控船,方便组装和量产。
为了使该系统简洁且便于操作,本设计的水样采集由电机组和自动采水器组成,待到指定深度,打开采水器水阀门完成后关闭并返回水面。利用直流电机,将水温传感器等相关实时测量设备送入指定水中,探测船中央控制器实时传输采集的相关数据。
通过采用ZigBee模块来实现数据的实时收发,使得本设计具有的数据传输速率低,使用便捷,模块化组装且低成本,低功耗的优点。
探测船动力控制模块船体采用两台15W的直流电机提供动力,安装两个方向舵控制船体运行方向。基于模糊自适应HD算法,FPGA将采集的信号进行智能分析,对船体的电机、方向舵等控制设备进行最优化控制,最大限度的满足探测、通信等设备对船体稳定性的要求。
远程控制中心将用户的船体控制指令发送给探测船,同时,实时处理探测船传回的各类数据在点阵液晶上显示。
1.2系统实现原理及仿真
1.2.1FPGA部分
FPGA及其外围电路控制着整个系统的运行和数据处理,我们采用了ALTERA公司的Cyclone Iv系列FPGA,型号为EP4CE6F17C8。
本实验使用FPGA作为整个船的控制中心,使用verliog语言编写驱动程序,使用串行通信,从FPGA发送一帧数据至CC2530,消息帧从一个低位的起始位开始,后面是8个数据位,一个奇偶校验位和一个停止位。
如图l仿真所示,当按键按下时发送数据,不同的按键对应船体实现不同的功能,例如按下keyl实现无线采集温湿度,key2实现无线控制舵机采集水质,key3返回采集的数据并显示在LCD或者数码管上。
1.2.2ZigBee部分
本次实验中利用ZigBee进行组网来实现远程控制船体。选择ZigBee的理由在于硬件和软件两个部分。硬件选择以CC2530为核心的开发板,其具有以下优点:体积小,能耗低,便携性高。由于船体内部空间有限,因此选择体积小的硬件设备是必要的。同时体积小,轻便带来的便携性将大大增加船体对于水质检测的效率。软件方面由于TI公司发布的Z-Stack协议已经很全面而且泛用性广泛,用户只需要在APP层自行设计自己所需要的对应事件处理函数,对于初学者较为友好。
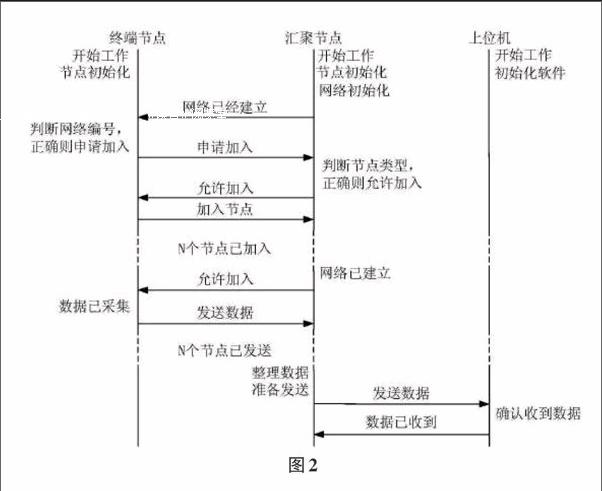
组网原理如图2所示。
当终端节点和协调器上电启动后,协调器首先发送邀请,等待终端节点加入。终端节点收到邀请发送加入请求,协调器收到信息确认身份并决定是否允许节点加入。如果节点被允许加入网络,则搭载的传感器开始采集数据,并将数据存储等待发送的请求回应。
当网络搭建好之后,协调器会以轮询的方式不断请求终端节点采集并传输数据。如果终端节点采集成功则会发送信息,如果失败则传输失败信息。协调器在经过收集后汇总,通过串口传递给FPGA。
本次实验ZigBee组网部分的程序分将实现3个功能:控制舵机使船体进行移动,控制舵机放置传感器实时检测水质,终端节点传感器将采集的数据传送回协调器。具体实现为:上位机FPGA按键触发,发送指定字符串作为命令,终端节点接收到信息,打开对应I/O口,此时终端节点编写对应的PWM触发舵机,使舵机进行工作。当传感器搜集到数据后,以一个固定时间为周期不断将数据传送回协调器,并由协调器通过串口传递给上位机FPGA并显示。
2结论
经过实际测试,本设计的无线智能遥控船船体控制优良,通信平台简洁有效,该系统开发平台可以对小型船体进行有效的智能遥控控制,同时根据用户的需要为用户安装其他模块提供接口,支持用户的二次开发。地表水检测力度的不断加大和全球资源勘探的不断深入,拥有着较大升级空间、优良人机界面、较强市场适应能力的无线智能探测船,在环境检测、科研勘察、军事侦查等诸多领域拥有着广阔的市场空间。
