
一种多用途陀螺式滚动旋翼遥感平台的研究与设计
2017-07-11 09:01赵燕王江华
电脑知识与技术 2017年15期
关键词:救援
赵燕 王江华

摘要:设计一种多用途陀螺式滚动旋翼遥感平台,该平台具有水、陆、空三栖行进能力,以适应各种复杂环境,在地震多发的当代社会,可代替救援人员进行现场侦测和实施救援。遥感平台以四旋翼飞行器为基础,将外框架设计为轻型滚轮式结构,使其既可以停留或滑行于水面又能以独轮直立平衡的方式实现陆地行驶,且其特有的独轮滚动行进方式可使其很容易进入一定的狭窄空间。实践证明,该遥感平台的平衡控制效果较理想。
关键词:四旋翼;救援;滚轮式;直立平衡
近年来,火灾,地震等自然灾害频发,人員搜救,物资投放,环境监测等各个方面都需要用到无人机。而三栖无人机是一种新兴无人机,打破了无人机只能在天上飞的固有模式,它能够实现在天上飞,在陆地上“滚动”,在水面“浮”的功能。
四轴无人机动力学原理较为简单,轮式结构的巧妙设计使得探测器能够前后滚动,可以进入狭窄空间进行工作,能适应各种复杂环境。三栖四轴无人机基于四轴无人机的优点,再外加其他的动力和控制模块,能够达到三栖行走目的,在其上搭载地形探测设备,即可辅助或代替救援人员实施救援。
1遥感平台概述
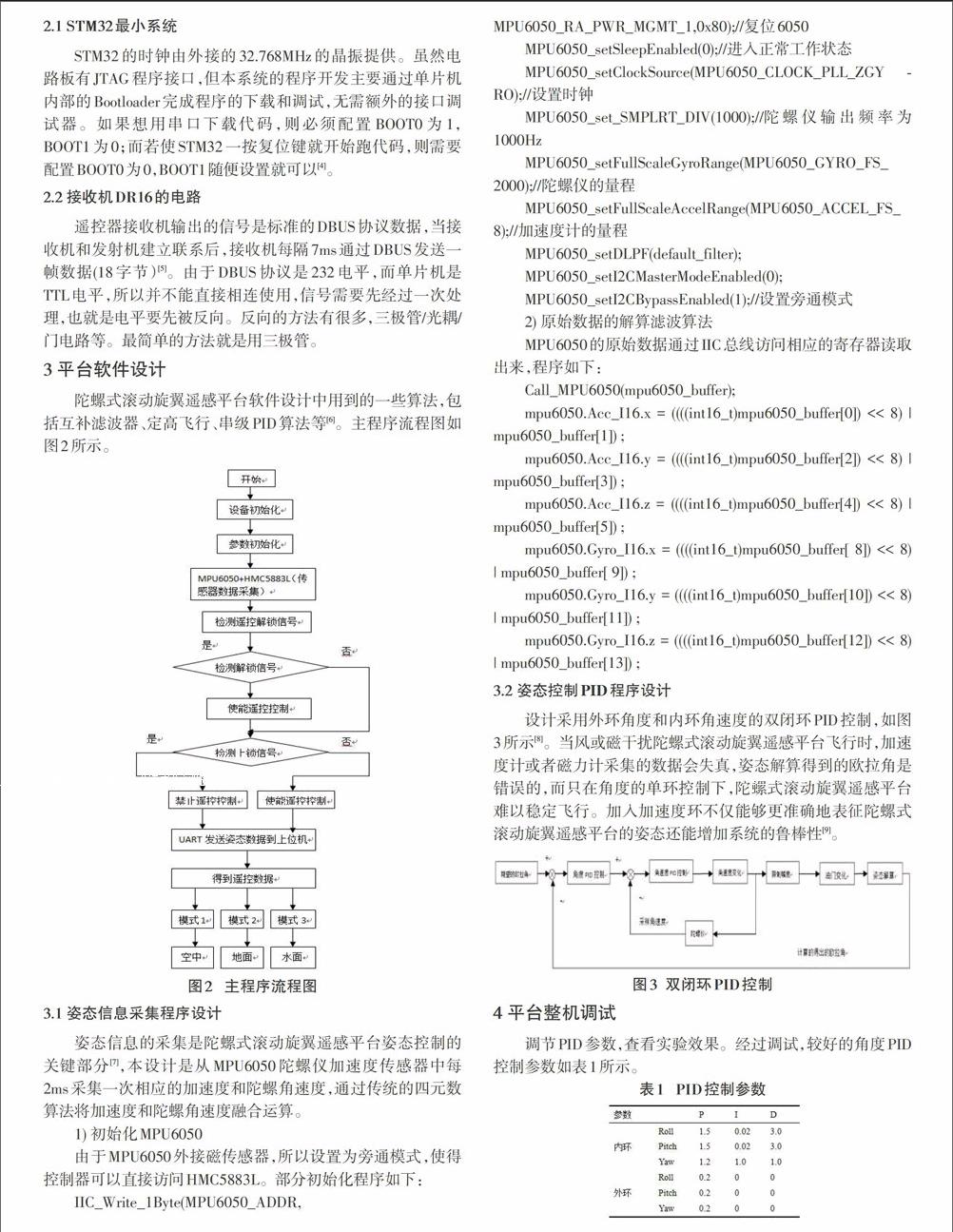
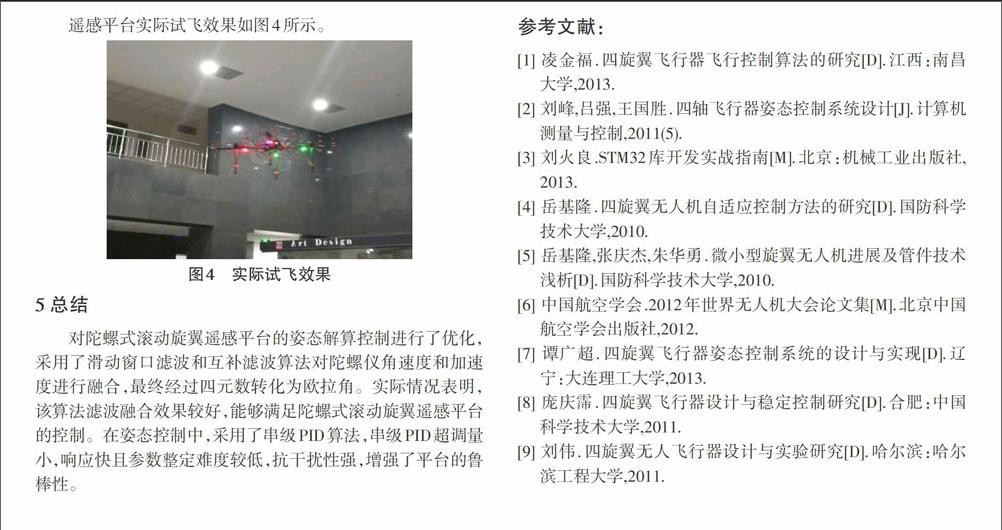
陀螺式滚动旋翼遥感平台由姿态检测模块、姿态控制模块和执行模块组成。通过对整机的软硬件测试表明,各模块均能按照预定的功能工作,能够实现平台的实时性稳定控制。对陀螺式滚动旋翼遥感平台进行了水、陆、空三栖行进实验。测验表明,控制算法能够有效地对陀螺式滚动旋翼遥感平台的姿态进行稳定性控制,完成三栖任务。
2平台硬件设计
陀螺式滚动旋翼遥感平台采用以ARM Cortex-M4为内核的STM32F405 MCU为主控单元,姿态检测模块采用MPU6050+HMC5883L来完成对姿态的测量,平台的遥控控制采用大疆公司的2.4GHz遥控系统遥控器发射机DT7和接收机DRl6t31、电源模块采用AMSll7-3.3制作、超声波测距模块采用HC-SR04、GPS定位模块以S1216F8-BD为核心。平台整体框图如图1所示。
猜你喜欢
哈哈画报(2022年5期)2022-07-11
疯狂英语·新读写(2021年6期)2021-08-05
学生天地(2020年1期)2020-08-25
小学科学(学生版)(2019年12期)2020-01-06
意林(儿童绘本)(2019年1期)2019-01-23
中国公路(2017年13期)2017-02-06
太空探索(2016年1期)2016-07-12
瞭望东方周刊(2016年8期)2016-03-12
数学大王·低年级(2015年6期)2015-07-09
新作文·小学作文创新教学(2009年5期)2009-05-13
