
基于TTR和LTR的轻型客车侧翻预警及仿真
2017-07-12 17:02肖葵余卓平熊璐
汽车技术 2017年6期
肖葵 余卓平 熊璐
(1.同济大学中德学院,上海 200092;2.同济大学汽车学院,上海 201804)
基于TTR和LTR的轻型客车侧翻预警及仿真
肖葵1余卓平2熊璐2
(1.同济大学中德学院,上海 200092;2.同济大学汽车学院,上海 201804)
针对某轻型客车的非绊倒性侧翻机理进行了分析,提出了基于TTR和LTR的车辆侧翻预测方法,并建立了TruckSim和Simulink的联合仿真模型,利用该模型对轻型客车在鱼钩工况下的侧翻性能进行了仿真。仿真结果表明,所建立的侧翻预警系统能适时地对轻型客车进行侧翻预警,且在鱼钩工况下TTR=0.4时的预警最可靠。
1 前言
据相关统计资料表明[1],仅2015年,营运客货车辆肇事总计5.04万件,占汽车责任事故总量的30.5%,因客车翻车事故导致乘员死亡的人数占客车乘员总死亡人数的27.4%,客车侧翻已经成为破坏人们生命财产以及交通安全的重要问题,因此针对客车侧翻的研究备受国内外学者的关注。
为了提高车辆的侧倾稳定性,侧翻预警系统在汽车稳定性控制中得到了广泛应用。如,Preston Thomas J等人[2]提出了基于横向载荷转移率(Lateral Load Transfer Ratio,LTR)的汽车稳定性控制和预警系统;Chen Bo等人[3]提出了基于侧翻时间TTR(Time To Rollover)的预警算法;Chad Larish等人[4]于2013年提出了利用PLTR(Predictive LTR)指标来评定车辆的侧翻危险程度,提高了预警系统的实时性;成光华等人[5]开发出基于TTR的侧翻预警控制器;于志新等人[6]提出了实时的TTR侧翻预警算法和防侧翻LQR最优主动控制策略;朱天军[7]开发了重型车辆侧翻预警车载测试平台。虽然国内外学者对防侧翻预警的研究取得了一定成果,但这些研究主要应用于重型半挂车,针对轻型客车的研究较少,而且大部分侧翻研究并未对侧翻预警值的设定进行分析。
为此,针对轻型客车的侧翻特点,本文提出了基于TTR和LTR的侧翻预警算法,建立了侧翻预警模型,并利用LTR算法计算出了轻型客车模型的侧倾阈值。通过在鱼钩工况下对轻型客车模型的联合仿真,设定出了TTR预警值,并对该TTR预警值的合理性进行了试验验证。
2 轻型客车侧翻机理
汽车侧翻是指汽车在行驶过程中绕其纵轴线转动90°或更大角度,以至车身与地面相接触的一种危险的侧向运动。引起轻型客车侧翻的因素很多,如轻型客车结构、道路条件和驾驶员误操作等。汽车侧翻可分为绊倒性侧翻(Tripped Rollover)和曲线运动引起的侧翻(Maneuver Induced Rollover)两类,绊倒性侧翻是指汽车行驶时产生侧向滑移,与路面上的障碍物侧向撞击而将其“绊倒”;曲线运动引起的侧翻指汽车在道路上行驶时,由于汽车的侧向加速度超过一定限值而使得汽车内侧车轮的垂直反力为零而引起的侧翻。
绊倒性侧翻主要是由于驾驶员酒后驾驶、疲劳驾驶、超速行驶、高速公路上超车行驶等行为导致的;曲线运动引起的侧翻与汽车本身的设计及车辆行驶时的道路线形有关,如车辆的重心高度、轮距、轮胎特性以及在弯道或高速变道上行驶等[8]。本文主要针对曲线运动引起的侧翻进行预警算法及仿真分析研究。
3 侧翻预警算法
侧翻预警的目的是在车辆即将发生侧翻危险时,能够给驾驶员或车辆主动安全系统提供信息,使其能够有充足的时间做出反应,避免侧翻事故的发生。
3.1 侧翻预警算法原理
本文采用基于TTR的侧翻预警算法,TTR表示车辆当前状态距离发生侧翻所需要的时间,其反映出车辆发生侧翻风险的程度,TTR值越小,说明车辆发生侧翻的风险越大,若TTR=0,说明车辆已经发生侧翻。因此,根据TTR的数值可以设定一个预警值,以提醒驾驶员或侧翻控制装置采取有效防侧翻措施,避免发生车辆侧翻事故。
3.2 侧翻预测模型
在侧翻预警算法中,定义车身侧倾到一边轮胎与地面作用力为0时的汽车侧倾角为TTR的侧翻参考角,即侧倾阈值φ0。本文在计算TTR时,定义车辆朝逆时针方向侧倾为正向侧倾,所得到的侧倾角为正值。正向侧倾时的TTR阈值为φ1;车辆朝顺时针方向侧倾为反向侧倾,反向侧倾角为负值,TTR阈值为φ2。尽管侧倾阈值因车型而异,但φ1=φ2,如图1所示。
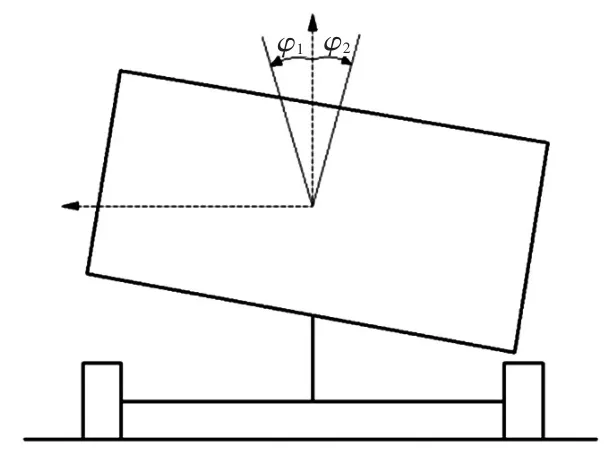
图1 车辆侧倾角示意
由于车辆侧倾方向是不确定的,设正、反向侧翻预测值分别为TTR1和TTR2,则车辆侧翻预测值TTR取二者的最小值。
首先计算TTR1值,设φ0=φ1,若当前时刻的车辆侧倾角φ(i)≥φ0,判定车辆已经发生侧翻,这时TTR1=0;若 φ(i) ≤φ0,则TTR1计算式为:
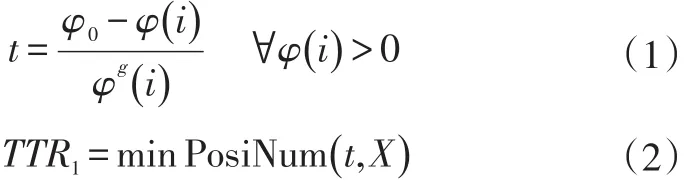
式中,t为车辆达到侧倾阈值的时间;X为设定时间。
式(2)的函数意义为选取参量t、X中的最小值。TTR2的推导与TTR1的推导相同[8]。因此,可以根据上式建立TTR的Simulink模型,如图2所示。
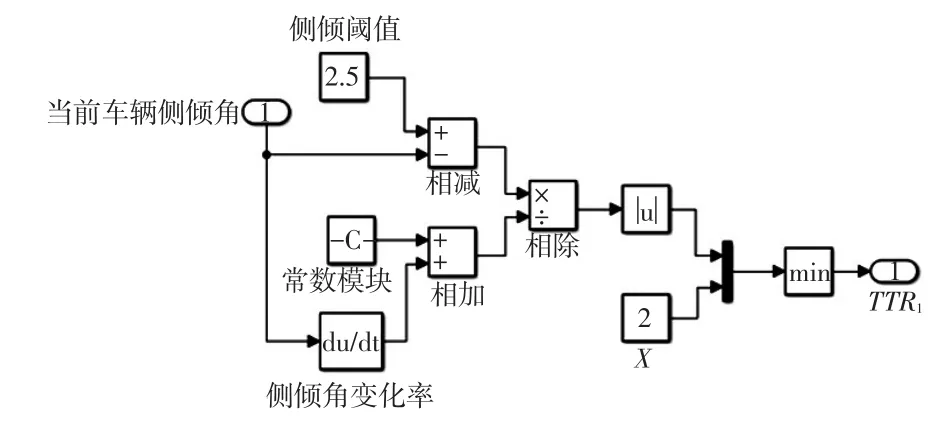
图2 侧翻预测值TTR的Simulink模型
3.3 侧倾阈值确定
目前,通常选取车辆横向载荷转移率、侧倾角或侧向加速度作为大型车辆的侧翻指标。考虑到车辆的动态特性,以车辆的动态横向载荷转移率LTRd作为轻型客车侧翻指标,并用其确定轻型客车的侧倾阈值。
动态载荷转移率LTRd表达式为:
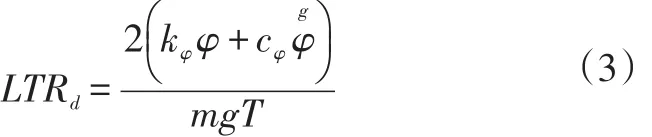
式中,kφ为轻型客车悬架的等效刚度;cφ为轻型客车悬架的等效阻尼;φ为侧倾角为车辆侧倾角的变化率;m为轻型客车质量;g为重力加速度;T为轮距。
根据式(3)可建立动态横向转移率LTRd的Simulink模型,如图3所示。
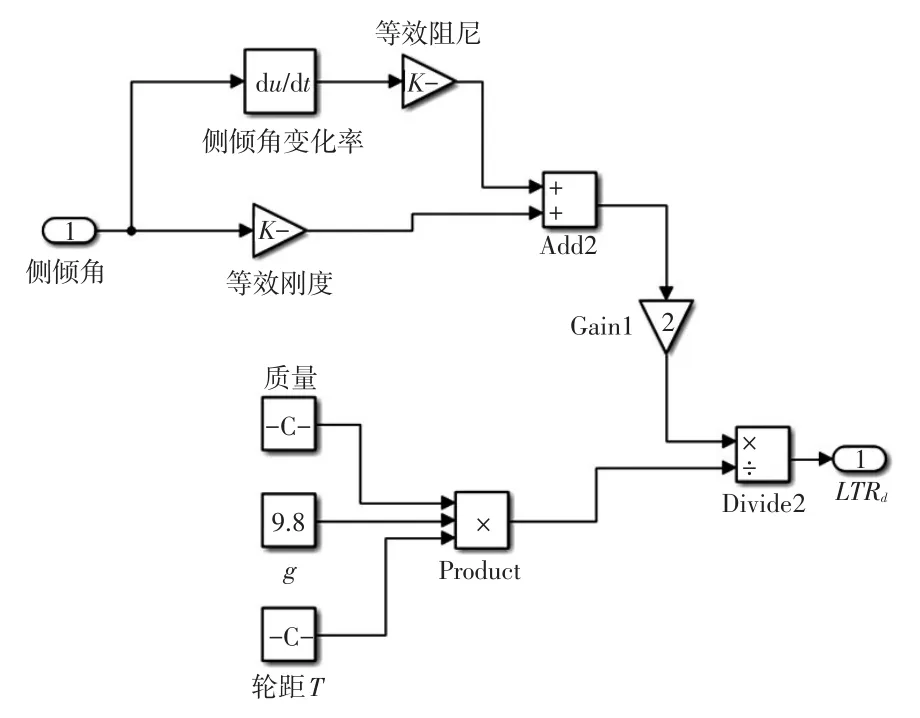
图3 动态横向载荷转移率LTRd的Simulink模型
根据相关文献[10,11],为了保证车辆的行驶安全,LTDd的门限值一般设定为0.9。将车辆相关参数输入Simu⁃link模型便可求出LTDd=0.9时车辆的侧倾阈值φ0。
本文选取的车辆模型为软件TruckSim中的轻型客车模型Tour Bus Loaded。Tour Bus Loaded的TruckSim模型如图4所示。软件TruckSim提供了Tour Bus Loaded的所有车辆参数,部分参数如表1所列。将车辆参数代入式(3),可得到LTDd=0.9时车辆侧倾角为2.5°,即该轻型客车模型的侧倾阈值φ0=2.5°。

图4 Tour Bus Loaded的TruckSim模型

表1 Tour Bus Loaded的部分参数
4 TruckSim与Simulink联合仿真分析
本文采用TruckSim和Simulink仿真软件,参照标准GB/T 6323—2014《汽车操纵稳定性试验方法》,在典型的鱼钩工况下对轻型客车模型Tour Bus Loaded进行侧翻预警算法的联合仿真分析,以确定合理的TTR预警值。首先启动TruckSim中的联合仿真模块,将TTR和LTR算法加入Simulink模型中,然后建立TruckSim与Simulink的联合仿真模型,如图5所示。
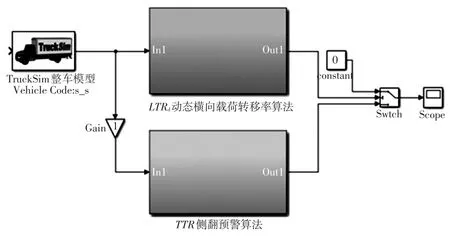
图5 Trucksim与Simulink联合仿真模型
在TruckSim中选择Tour Bus的鱼钩转向工况,并设置鱼钩工况下的转向盘转角时间历程如图6所示。
由于车辆在侧翻时的状态与路面附着系数及车速密切相关,因此针对高、低附着系数路面及高、低车速等4种情况进行仿真分析。分别设定高附着系数路面的附着系数为0.85,低附着系数路面的附着系数为0.2,并采取控制变量法,排除两种不同附着系数下车速的影响,统一设定初始车速为100 km/h,以便于观察轻型客车发生侧翻的情况。分别设定较高车速为150 km/h,较低车速为20 km/h,并排除两种车速下附着系数的影响,统一设定此时的附着系数为0.85。
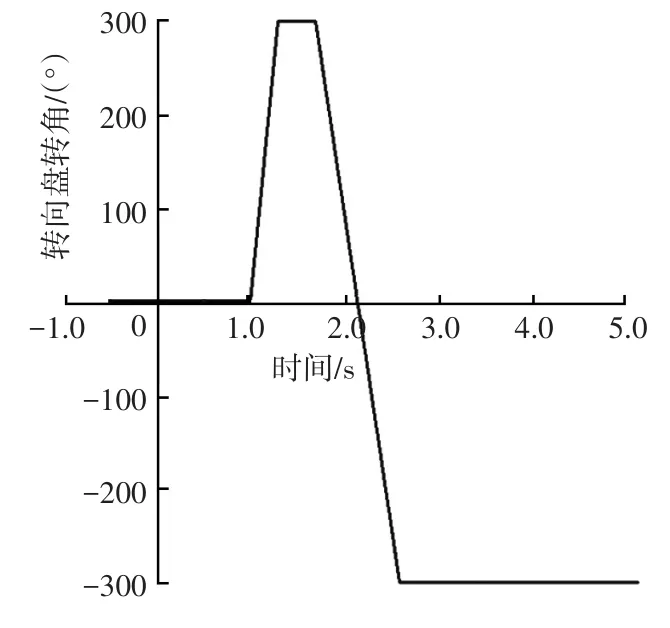
图6 鱼钩工况下转向盘转角时间历程
4.1 高附着系数路面对轻型客车侧翻状态的影响
利用TruckSim软件建立轻型客车仿真模型,采用鱼钩转向工况进行仿真试验,并加入TTR预警算法,仿真结果如图7所示。
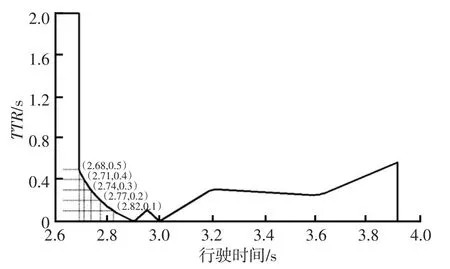
图7 鱼钩工况下高附着系数路面仿真试验结果
由图7可看出,轻型客车侧翻时间约在3.9 s,因为此时TTR=0,并且在此时间后TTR恒为0,表明此时轻型客车已经侧翻。另外,从图7还可看出,在t=2.9 s和t=3.0 s时,TTR也为0,但此时轻型客车并没有发生侧翻,因为在t=2.9~3.0 s和t≥3.0 s的时间范围内,TTR不恒为0,这两个点只是侧翻的危险点,这可能是由仿真误差造成的,实际上这两点的TTR并不为0。
由相关文献可知,一般条件下驾驶员的反应时间在0.3~1 s内,因此设定TTR=0.4 s时预警,此时轻型客车侧翻预警时间约为t=2.71 s,留给驾驶员的反应时间约为1.2 s,驾驶员有足够的时间做出阻止侧翻的操作,可以避免侧翻危险的发生。
若设定TTR在0.4~2.0 s之间预警,虽然驾驶员的反应时间会有所增加,但报警过早容易造成驾驶员紧张,反而不利于驾驶员的正常操作。若设定TTR在0~0.4 s之间预警,虽然理论上驾驶员仍有足够时间做出防侧翻操作,但若驾驶员反应较慢,则会因没有足够时间做出阻止侧翻操作而发生侧翻危险。因此设定TTR=0.4 s为预警值较合理。
4.2 低附着系数路面对轻型客车侧翻状态的影响
轻型客车在低附着系数路面进行鱼钩工况仿真试验,试验结果显示侧翻预警时间TTR是一条直线,说明在低附着路面上该轻型客车没有侧翻的趋势,Trucksim仿真动画与此结果一致,由此表明TTR控制策略具有一定的准确性,也说明Trucksim的仿真结果与Trucksim和Simulink联合仿真结果一致。
4.3 高车速对轻型客车侧翻状态的影响
轻型客车以150 km/h的初始速度进行鱼钩转向工况仿真试验,试验结果如图8所示。
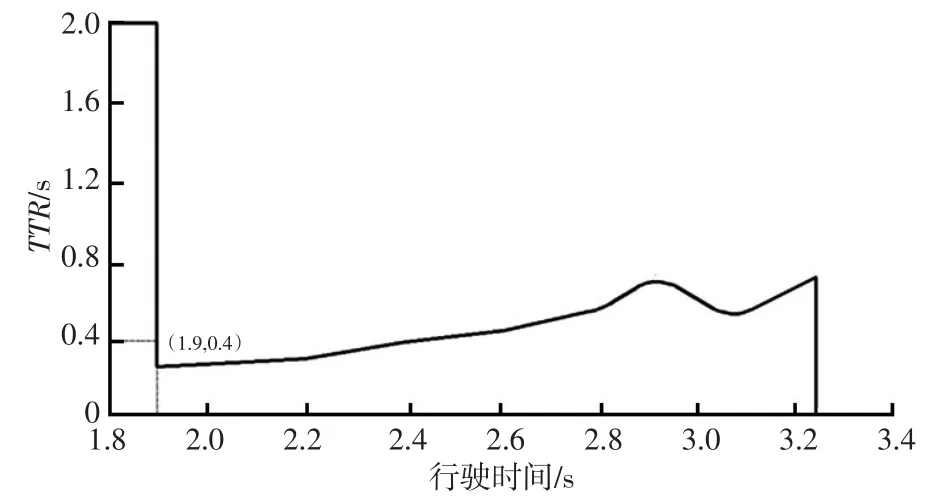
图8 鱼钩工况下高车速仿真试验结果
设定TTR=0.4时预警,则由图8可看出,侧翻预警时间约为t=1.9 s,而在t=3.2 s左右时车辆发生侧翻,留给驾驶员的反应时间约为1.3 s,驾驶员有足够的时间做出阻止侧翻的操作,正常情况下可避免侧翻危险的发生。
4.4 低车速对轻型客车侧翻状态的影响
轻型客车以20 km/h的初始速度进行鱼钩工况仿真试验,仿真结果显示侧翻预警时间TTR是一条直线,说明在低车速下该轻型客车没有侧翻的趋势,Trucksim仿真动画与此结果一致。
由以上仿真结果可知,本文设定的鱼钩工况下TTR=0.4 s能可靠并且适时地对该轻型客车的侧翻危险进行预警,既不会产生误报,也不会产生早报行为,能够给驾驶员留有足够的时间进行防侧翻操作。
5 结束语
本文提出了基于TTR和动态横向载荷转移率LTR的侧翻预警算法,并利用TruckSim和Simulink对轻型客车模型Tour Bus Loaded进行了侧翻预警算法的联合仿真分析,得出了Tour Bus Loaded的TTR侧翻曲线,并针对该曲线设定了一个合理的TTR预警值。利用所设定的预警值能可靠并且适时地对该轻型客车的侧翻危险进行预警,能够给驾驶员留有足够的时间进行防侧翻操作,避免侧翻危险的发生。
1 国家统计局.中华人民共和国2015年交通事故数据统计.2016.
2 Preston Thomas J,Woodrooffe JHF.Feasibility Study of A Rollover Warning Device for Heavy Trucks.Transport Canada Publication No.TP 10610E.
3 CHEN Bo,PENG H.Differential-braking-based rollover prevention for sport utility vehicles with human-in-theloop evaluations.Vehicle System Dynamics,2001(4-5):359~389.
4 Chad Larish,Damrongrit Piyabongkam,Vasilios Tsourapas.A New Predictive Lateral Load Transfer Ratio for Rollover Prevention Systems.IEEE Transactions on Vehicular Tech⁃nology,2013(7):2928~2936.
5 成光华.基于TTR的汽车侧翻预警器设计:[学位论文].南京:南京航空航天大学,2008.
6 于志新,宗长富,何磊,等.基于TTR预警的重型车辆防侧翻控制算法.吉林大学学报(工学版),2009,39(s2):251~254.
7 朱天军.基于改进TTR重型车辆防侧翻预警及多目标稳定性控制算法研究:[学位论文].长春:吉林大学,2010.
8 富子丞.营运客车侧翻稳定性及其控制算法研究:[学位论文].西安:长安大学,2012.
(责任编辑 文 楫)
修改稿收到日期为2017年1月19日。
Rollover Warning and Simulation of Light Bus with TTR and LTR
Xiao Kui1,Yu Zhuoping2,Xiong Lu2
(1.Sion-German College of Tongji University,Shanghai 200092;2.School of Autcomotive Studies,Tongji University,Shanghai,201804)
Untripped rollover mechanism of a light bus is analyzed in this paper,and a vehicle rollover prediction method based on TTR and LTR is proposed,and co-simulation model is built in TruckSim and Simulink,that is used to simulate the rollover behavior of light bus in fishhook conditions.The simulation results show that the built rollover warning system can warn the light bus in a timely manner,and it can provide the most reliable warning when TTR=0.4 in fishhook conditions.
Light bus,Fishhook,Rollover,Warning
轻型客车 鱼钩工况 侧翻 预警
U462
A
1000-3703(2017)06-0007-04
猜你喜欢
大灰狼画报(2022年7期)2022-08-06
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
智能计算机与应用(2020年4期)2020-08-31
小读者·爱读写(2018年8期)2018-08-04
小学教学研究·新小读者(2016年10期)2016-10-10
