基于T—S模糊控制器的网络控制系统仿真研究
2017-07-12 09:44张晓倩宋晓茹
计算技术与自动化 2017年2期
关键词:稳定性
张晓倩+宋晓茹

摘要:为了研究网络控制系统不同的控制算法对系统的影响,利用Matlab中Simulink模块和TrueTime工具箱搭建网络控制系统的模型,当网络控制系统存在一定时延时,分别搭建采用PID控制器的网络控制系统的模型和采用T-S模糊控制器的网络控制系统的模型,仿真分析系统的输出曲线,结果表明:采用T-S模糊控制器的系统输出曲线超调量小,调节时间短,很快达到稳定,说明基于T-S模糊模型的控制算法能够补偿时延,提高系统的稳定性。
关键词:网络控制系统;T-S模糊控制器;TrueTime工具箱;稳定性
中图分类号:TP273 文献标识码:A
Abstract:In order to study the influence of different control algorithms on the networked control system,the model of networked control system is built by usingsimulink module in matlaband TrueTime toolbox,Models are built respectively by using PID controller of networked control system and T-S fuzzy controller of networked control system,simulation analysis of the output curve of system when networked control system has some time delay. The results show: the system output curve with T-S fuzzy controllerhave small overshoot, short adjusting time, quickly achieve stability, control algorithm based on T-S fuzzymodel can compensate delay, improve the stability of system.
Key words: Networked control system, T-S fuzzy controller,TrueTime toolbox, Stability
1.引言
传感器从被控对象中采集信息,通过通信网络把采集并处理过的信息发送给控制器,控制器根据控制算法得到的控制信号通过通信网络发送给执行器,执行器收到控制信号作用于被控对象,构成的闭环的、分布式的控制系统,称为网络控制系统[1](Networked Control System,NCS)。李建东[2]在基于线性矩阵不等式的条件下,给出系统稳定的充分条件和鲁棒控制器,通过相关的数值例子来研究基于T-S模糊控制器对网络控制系统的有效性。郝星华等[3]研究基于T-S模糊控制器的带有一定丢包率的网络控制系统,并设计出一种镇定T-S模糊控制器的方法。顾艳丽等[4]先介绍基于T-S模糊控制器网络控制系统的应用,再研究基于T-S模糊控制器的网络控制系统鲁棒控制,最后总结网络控制系统的稳定性及鲁棒控制等问题。但并没有针对基于T-S模糊控制器的网络控制系统进行建模、编写各个模块程序、仿真分析。本文先搭建T-S模糊控制器模型,并应用在网络控制系统模型中,再编写传感器部分、控制器部分、执行器部分的程序,最后通過仿真结果说明该控制算法能够有效的补偿时延,提高网络控制系统的稳定性。
2.T-S模糊控制器的特点
建立的相对准确的被控对象的数学模型,采用一般的控制理论来设计控制器,实现对系统的控制;但是实际中的很多系统是很难建立精确的数学模型,采用模糊控制可以不建立被控对象的数学模型,对被控对象的非线性和时变性具有一定的适应性,从而实现对系统的控制。因为被控对象的动态特性隐含在模糊控制器输入、输出模糊集和模糊规则中。
T-S模糊控制器的特点是控制规则前件采用模糊量集合,后件模糊输出的是精确的线性函数,有利于控制器的系统化分析和设计。由于后件模糊输出的是精确的线性函数,使得T-S模糊PID控制器实现了对输入信号的局域线性控制和全域的非线性控制,从而使得T-S模糊控制器既保留了一般PID控制器带来的控制方式简单的优点,又能适用于非线性、时变及滞后系统的控制,证明了模糊控制的鲁棒性强。网络控制系统是控制系统中加入网络,从而带来一系列的问题,如时延、数据丢包等。由于网络速率、网络当前空闲情况的时变,采用一般PID控制算法设定固定的P、I、D的值来控制数据的收发很容易造成较大的时延、甚至是数据包丢失;采用T-S模糊控制算法来控制网络控制系统,根据当前的网络通信情况来调整P、I、D的值,以便更快、准确的收发数据。
3.T-S模糊控制器
3.2 T-S模糊控制器设计
(1)在Matlab命令窗口中输入fuzzy,按回车键,则弹出默认为Mamdani型的FIS Editor界面。
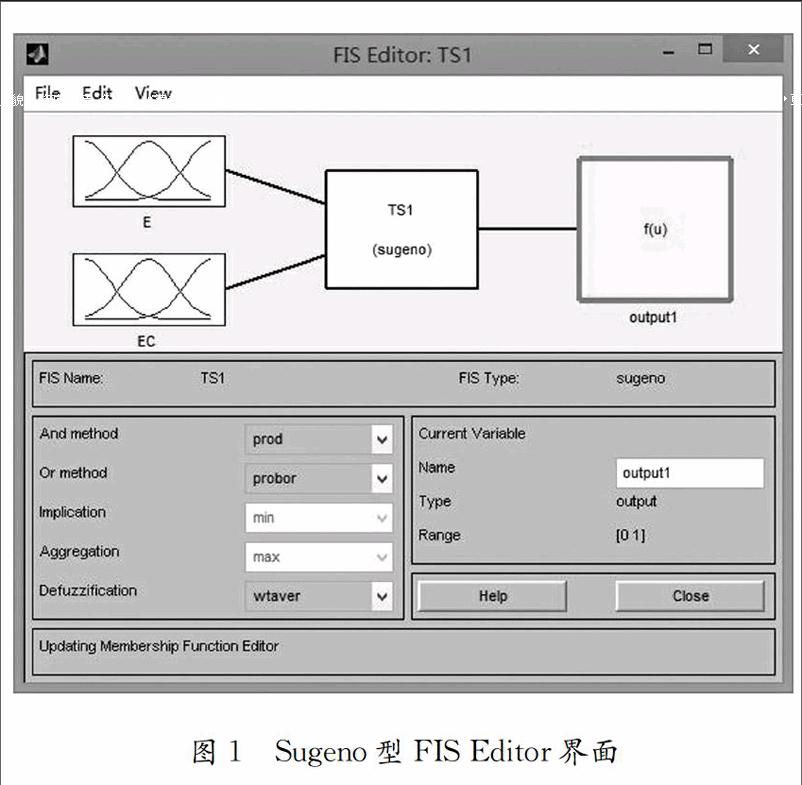
(2)在Mamdani型的FIS Editor界面上,选择菜单命令File→NewFIS→Sugeno,则弹出Sugeno型的FIS Editor界面,就建立好Sugeno型模糊系统的FIS Editor界面。根据本课题模糊控制器的要求,输入变量有两个;于是,选择菜单命令Edit→AddVariable→Input,此时的FIS就成为二维的;选择菜单File→Export→To File,以TS1为名称进行保存。完后成上述操作后,FIS Editor的界面如图1所示。
(3)模糊逻辑推理的算法会影响系统的输出,这里设置And method与方法为prod、Or method或方法为probor、Defuzzification反模糊化为wtaver。
(4)单击input1模框,在当期变量区,设置其名称为E。单击input2模框,在当前变量区,设置其名称为EC。单击output1模框,在当前变量区,设置其名称为f(u)。
(5)单击E模框对隶属度函数设置为三角形隶属度函数,论域设置为[-2,2],模糊量化等级设为五个分别为NB、NS、Z0、PS、PB。单击EC模框对隶属度函数设置为三角形隶属度函数,论域设置为[-3,3],模糊量化等级设为三个分别为N、Z0、P。单击f(u)模框设置十个线性函数分别命名为mf1、mf2、mf3、mf4、mf5、mf6、mf7、mf8、mf9、mf10,分别对这十个线性函数按确定的模糊控制器的参数进行设置编辑,得到模糊控制编辑器。
(6)模糊控制规则作为模糊控制的核心组成部分,其编辑过程是通过对模糊编辑器中的Sugeno模块进行编辑而得来的。形如if (E is NB) and (EC is N) then (f(u) is mf1),输入完一条单击“Add rule”,即可添加一条规则。
3.3 T-S模糊控制器模型
T-S模糊控制器模型如图2所示。
T-S模糊控制器由两部分组成,第一部分是T-S模糊控制器和PID控制所结合的参数自整定模糊PID控制器,它的主要作用是通过模糊推理对PID控制的P、I、D三个参数进行处理和调节以适应网络控制系统不同的E与EC对控制器参数的不同要求,第二部分由网络控制系统中的控制器的实时内核模块组成,它的主要作用是在Rcv端口接收模糊PID控制器处理过的控制信号,然后经由Snd端将信号传送到网络控制系统的网络模块。
4.仿真研究
利用Matlab软件中的Simulink模块库和Truetime 1.5工具箱中的相关模块搭建网络控制系统模型,其中:搭建基于PID控制器的网络控制系统模型如图3所示,系统输出曲线结果如图5所示;搭建基于T-S模糊控制器的网络控制系统模型如图4所示,图2构建的T-S模糊控制器嵌入到图5中的控制器,系统输出曲线结果如图6所示。
图3、4中的网络控制系统的被控对象传递函数都为
其中:输入信号为阶跃信号,网络类型为CSMA/AMP(CAN),网络的数据传输速率为80Kbits/s,采样周期h=0.01s,干扰为0,时延为0.011s,采用PID控制器的参数:K=1,TD=0.04,采用T-S模糊控制器的参数具体设置在模糊规则中体现。
由图5和图6可以看出,当时延为0.011s时,采用一般PID控制器的系统输出曲线已经离散且失去稳定,而采用T-S模糊PID控制器的系统输出曲线经历两次震荡后系统就趋于稳定且超调量小,所用的调节时间只有0.2s,由此可以看出,采用T-S模糊模型的控制算法能够有效的补偿时延,提高了系统的稳定性。
5. 结论
本文从不同控制策略的角度出发,分别建立基于PID控制器的网络控制系统模型、基于T-S模糊控制器的网络控制系统模型,两个模型设置相同的控制网络类型、网络传输数据的速率、网络时延,通过仿真结果说明基于T-S模糊模型的控制算法控制效果良好,鲁棒性强。
参考文献
[1] 王凯.非线性网络控制系统的T-S模糊建模及控制.碩士学位论文.哈尔滨:哈尔滨理工大学,2014.
[2] 李建东.基于T-S模糊模型的网络控制系统的时滞研究.硕士学位论文.杭州:杭州电子科技大学,2014.
[3] 郝星华,池小波,贾新春.基于T-S模糊模型的网络控制系统的镇定[J].太原科技大学,2007,28(5):353-355.
[4] 顾艳丽,王金宝.基于T-S模糊模型的网络系统鲁棒控制研究[J].科技广场,2013,10:6-10.
[5] 杜璧秀,张淑梅,高慧斌等.基于TS模型的小车倒立摆控制[J].电子测量技术,2012,35(9):56-59.
[6]韩文虹,赵小丽.基于TS模糊PID控制模型的发电机控制器设计[J].计算机测量与控制,2012,20(2):386-388.
[7]马建华,德元,张辉.基于TS模型的模糊预测控制在列车速度控制器中的应用研究[J].吉林师范大学学报:自然科学版,2012,33(1): 50-53.
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
上海师范大学学报·自然科学版(2022年3期)2022-07-11
交通科技与管理(2022年8期)2022-05-07
交通科技与管理(2022年8期)2022-05-07
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
新农业(2018年3期)2018-07-08
电机与控制学报(2018年9期)2018-05-14
求知导刊(2017年22期)2017-10-13