
基于无人机图像的地面裂缝检测
2017-07-12 11:37周敏
电脑知识与技术 2017年13期
关键词:无人机
周敏

摘要:随着我国道路建设的完善,道路的管理与养护越来越重要。该文针对道路裂缝,采用无人机的方式进行裂缝图像的获取,用图像处理的方法进行识别。算法采用灰度变换的方式凸出裂缝,采用双边滤波在保持裂缝边缘的条件下进行去噪。通过canny边缘检测进行图像的分割,将裂缝从背景图像中提取出来。对于边缘检测过程中裂缝图像断裂的情况,采用线段最邻近端点相连的方式进行裂缝的连接,并通过线性检测的方式将裂缝最终识别出来。测试结果取得了良好的效果。
关键词:裂缝检测:无人机;canny边缘检测:裂缝连接
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2017)13-0152-02
1概述
目前为止,我国的道路桥梁建设十分的迅速,随着庞大的公路网的建成,随之而来的道路管理和养护问题也日益突出。道路养护的实际过程中,从最初的人工发现问题到各种道路巡检车,慢慢地开始由原始的人工到半自动方向发展。目前的针对道路的病害,尤其是道路的裂缝,基本还停留在由人工去发现以及判断裂缝病害程度的阶段。
道路病害的自动检测包括两个方面。一是表观图像的获取。目前发展出的主要是道路巡检车,同时随着无人机技术的飞速发展,将无人机应用于道路的管理养护工作中也是一个明显的趋势。二是病害图像的智能识别处理。这方面依靠的是图像处理技术的发展。传统的图像处理技术以及新型的基于机器学习的图像处理技术都能有效的应用于道路病害识别这一领域。
2道路裂缝识别方案
针对道路病害的信息获取,我们采用无人机,沿道路规定航线,搭配高倍变焦摄像头的方式进行裂缝图像的获取。
获取图像之后,就是对图像的处理,识别裂缝的存在。在裂缝的识别过程中,首先要做的是图像预处理,包括图像的灰度化,灰度变换,以及滤波去噪。第二步是图像的分割,将裂缝信息从复杂的原始图像中分离出来,对此有阈值分割和边缘检测两种方法。同时,在图像分割的过程中,必然会造成裂缝断裂的现象,对此,我们基于裂缝线段最邻近端点进行了裂缝的连接。最后就是基于裂缝的线性特征排除干扰提取裂缝。
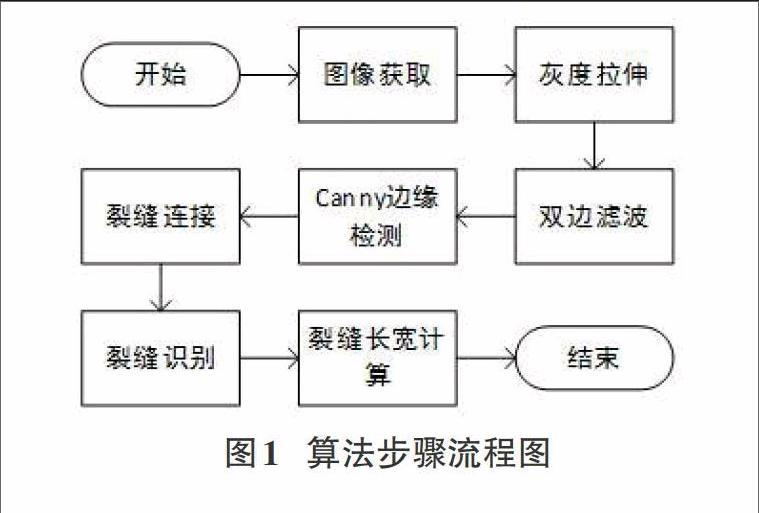
3算法流程
3.1图像预处理
3.1.1灰度化
因为在裂缝识别过程中,颜色信息并没有用到,我们首先将RGB图像按照公式(1)进行灰度化处理:
v=0.299R+0.587G+0.114B (1)
其中,v是转化后的灰度值,R,G,B分别是原图像红绿蓝三通道的值。
3.1.2灰度拉伸
为了使目标裂缝更加突出,需要对图像进行增强操作。灰度变换能将我们选择的较小的灰度区间扩展成较大的灰度区间,使裂缝凸显出来。转换公式如(2)。
(2)
f(x,y)表示输出图像某点的灰度值,g(x,y)为原始图像的输入点灰度值。k表示分段区间斜率,x1,x2表示拐点的横坐标值。
3.1.3图像滤波
我们采用了双边滤波的方法。双边滤波(Bilater-al filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。
3.2边缘检测
一个好的边缘检测应该有以下三条准则:
1)好的信噪比;2)好的定位能力;3)对单一边缘仅有唯一响应。
Canny算法优化了上边的所有准则。Canny算法首先通过高斯滤波器平滑图像以达到好的信噪比,再采用窗口计算灰度梯度的幅值和方向。为了精确定位边缘,必须细化梯度幅值图像G中的屋脊带,只保留幅值的局部极大值,即非极大值抑制。最后采用双阈值方法从候选边缘点中检测和连接边缘。对候选边缘图像N中标记为候选边缘点进行检测。如果点的梯度幅值高于大阈值,认为其实边缘,低于小阈值,则认为不是边缘,而对于梯度幅值处于两个阈值之间的像素点,则将其看作疑似边缘点,再进一步依据边缘的连通性对其进行判断。
3.3裂缝连接
边缘检测会会破坏裂缝的连续性,我们需要将断裂的裂縫连接。
首先我们通过寻找凸包的方式找到每条线段的端点,得到端点集合S={S1,S2,S3…Sn},其中Si表示每条线段的端点集合。然后对于不同的线段Si和Sj,计算遍历所有的端点,找到距离最短的两点。如果距离小于阈值,则将两线段连接。
3.4线性识别
由于裂缝具有明显的线性特征,比如说周长和面积的比值,最小外接矩形的长宽比等。通过链码跟踪的方式,我们能容易得到各连通域的周长L以及面积S。试验中,我们将满足条件S≤L2/30的线段保留,将面积S<20的小区域删除,在寻找最小外接矩,将满足外接矩长宽比大于3的区域保留。如此我们留下的就是裂缝了。
4结果分析
实验是在Windows10平台上进行,采用C++语言进行程序的编写。图2选取了图像处理过程中的部分中间处理过程,由最后的结果(e)对照原图像(a)可知,实验对于采集的病害图像具有较好的识别能力。
5结论
本文设计了一种基于canny边缘检测的裂缝检测方法。对于简单的裂缝图像具有良好的检测效果。另一方面,对于复杂背景的裂缝图像海域要更进一步的研究探索。
