电动汽车充电站的无功补偿控制策略研究
2017-07-12 11:41闫婧
计算技术与自动化 2017年2期
闫婧

摘 要:为改善电动汽车充电站接入电网后引起的电压波动、无功不足等电能质量问题,提出了一种对电网进行无功补偿的控制策略。利用晶闸管投切电容器(TSC)无功补偿装置与模糊控制相结合,采用专家经验的方法,通过模糊控制器的双输入量来控制输出量,从而控制TSC的投切。仿真结果表明,通过该控制策略补偿后的电压维持在正常允许范围内,电网中所需的无功功率明显减少,且仿真速度加快。说明电动汽车充电站接入电网后TSC无功补偿的模糊控制控制策略有效、可行。
关键词:电动汽车充电站;晶闸管投切电容器;无功补偿;模糊控制
中图分类号:TM7 文献标识码:A
Abstract:In order to improve the electric vehicle charging station connected to the electricity grid caused by the voltage fluctuation and the shortage of reactive power quality problems, this paper proposes a grid for reactive compensation control strategy. Conbining the thyristor switched capacitor (TSC) reactive power compensation device and fuzzy control, using the method of expert experience, output is under control through the double input and the cutting of the TSC will be controlled. Simulation results show that the voltage will maintain in the normal after the control strategy compensation,the required reactive power in power grid decreased significantly and the simulation will speed up,which means the strategy of fuzzy control is effective and feasible,
Key words:The electric car charging stations,Thyristor switched capacitor,Reactive power compensation,Fuzzy control
0引言
电动汽车的普及引起了人们的广泛关注,与之配套使用的基础设施的应用也成为了焦点。电动汽车充电站接入电网后的电能质量问题也相继出现,需引起足够的重视。目前出现的影响电网中的电能质量的主要问题就是无功不足和谐波污染。无功功率的变化会影响电网中的电压波动,造成电能的消耗,甚至会影响电路中电气设备的使用寿命等。晶闸管投切电容器(TSC)是无功补偿装置中最基本的一种,本文将模糊控制技术与TSC相结合,应用于电动汽车充电站。通过对控制策略的研究验证对接入电网中无功功率的补偿效果。
1 电动汽车充电站模型
电动汽车充电机的工作原理:将三相电路中的交流电经二极管进行滤波和整流,整流后的直流电通过高频的功率变换电路将输出的电流作为二次滤波蓄电池的直流电源。其高频充电机工作原理图如图1所示。
2 晶闸管投切电容器(TSC)
晶闸管投切电容器主要由电容器和一对极性相反的晶闸管串联而成。电抗器主要用来抑制电路中因误操作而引起的冲击电流,电容器会因为这种误操作进行不适当的投切。电抗器与电容器搭配使用可以避免系统发生谐振。晶闸管投切电容器工作在动态发出无功功率的工作状态,TSC投入后,相反极性的晶闸管导通,投入电容器组,并发出容性无功功率;TSC断开后,相反极性的晶闸管阻断,晶闸管投切电容器不投入电容器组,不发出无功功率。其工作原理如图2所示。
3 模糊控制无功补偿原理
3.1 模糊控制的设计思想
模糊控制器是以模糊集合化、模糊语言变量以及模糊逻辑推理构成的一种计算机数学控制,通过对控制器语言变量即输入和输出变量以自然语言形式给出的变量。一般将误差及其变化率作为模糊控制的语言输入变量。将带有自调整因子的模糊控制在MATLAB仿真软件下进行仿真和对比,来确认加入模糊控制策略后在稳定时间、超调及鲁棒性等几方面的优势。
单变量模糊控制器的输入量个数称为模糊控制器的维数,一般人们靠观测被控对象输出和输出变化率或输出变量和输出变量的总和来设定控制量的大小,因此,确定模糊控制器的重点就是确定模糊控制器的输入和输出选取哪些变量。
一维模糊控制器的输入、输出变量是系统的偏差量和控制量的变化值,常用于一阶被控对象,此系统的动态性能不佳。
二维模糊控制器的输入变量是某个对象的偏差量和偏差变化量,输出变量是控制量,二维控制器比一维控制器相对稳定,有较好的控制效果。
三维控制器的三个输入变量分别为系统的偏差量、偏差的变化量和偏差变化的变化率,输出变量为控制量的变化值。这种模糊控制器结构复杂,计算机运行速度慢。
3.2 TSC模糊控制技术
TSC模糊控制策略设计的思想是當电压升高、无功功率过补偿时,切除电容器,并发出电压下降的指令,当电压下降、无功功率欠补偿时,发出升压指令同时投入电容器。因此将无功和电压相对于标准值的偏差作为模糊控制器的输入,输出的电容器投切作为控制器输出。
TSC模糊控制采用二维模糊控制器,其模糊条件语句为“if A and B then C”。A、B和C分别是二维模糊控制器的输入模糊集合和输出模糊集合。其中的模糊关系R则根据模糊条件语句来确定,本文由TSC模糊控制系统双输入单输出原理图如图3所示
图中TSC模糊控制系统双输入为电压偏差和无功偏差。控制系统单输出为无功补偿量。模糊集合U和Q的论域分别属于A和B。这种模糊控制系的控制规则为模糊条件语句的“if A and B then C”。
3.3 模糊系统的语言变量赋值表
TSC模糊控制系统双输入分别为电压偏差和无功偏差,将模糊集合论域分成7个级别,对应的模糊语言值为:{NB,NM,NS,NO,PS,PM,PB},将双输入单输出的模糊集合U、Q、C的论域取为{3,2,1,0,-1,-2,-3},表示现在的无功功率状态:极低、很低、较低、正好、较高、很高、极高。表1、2、3为模糊集合的语言变量赋值表。
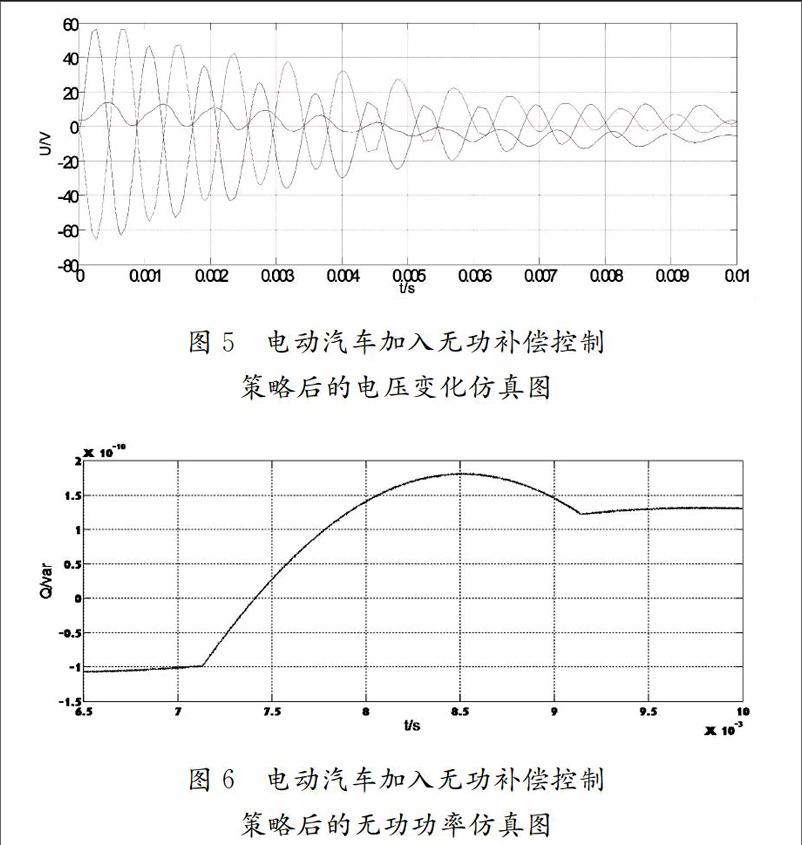
从上述仿真图中可以看出,电动汽车充电站加装无功补偿装置控制策略后的无功功率明显比未加补偿的无功功率减小,说明TSC模糊控制系统可以补偿电动汽车充电站的无功,达到理想的效果。
5 模糊神经网络的控制
模糊神经网络的控制器可以通过处理模糊信息完成模糊推理,而神经网络则是通过训练的过程达到学习的目的。神经模糊控制系统可由正向前馈网络、反向前馈网络、模糊神经网络等多种神经网络来实现,带有神经网络的模糊控制结构图利用记忆神经网络来记忆模糊控制规则。
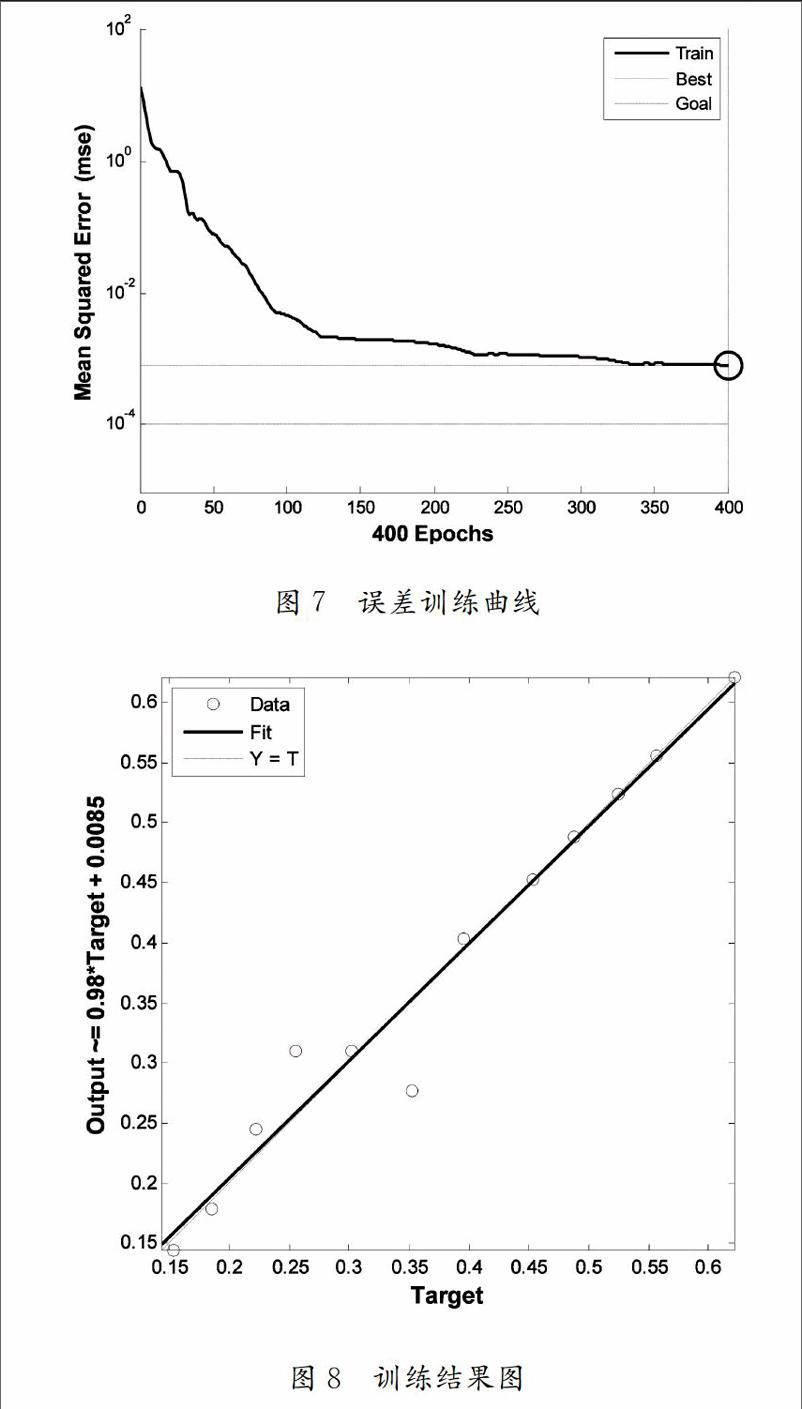
上述的模糊控制运行后通过查表做出控制决策的“经验”规则表只能按照已经编入的规则进行进行控制,在运行中占用了一定的内存空间。而神经模糊控制是利用离线训练好的网络,通过在线计算得到最优输出,这种控制方式反应速度快,可以优化模糊控制控制规则。而神经模糊控制器和普通模糊控制没有多大区别,只是运用模糊控制规则过程中神经网络采用了有联想记忆的离线训练,加快了程序的运行。从表4知有7*7=49条控制规则,每条规则对应一对样本,则共有49对样本,将它们依次送入神经网络根据目标样本进行离线训练。训练结束后,神经网络就记忆了模糊控制规则,使用时就有联想记忆功能。分别对目标样本和输入样本存入MATLAB软件下的.dat文件下,进行神经网络离线训练的编程,以下图7、图8是神经网络对模糊控制器中控制规则的离线训练结果。
6 结论
通过对电动汽车充电站数学模型的分析、TSC晶闸管投切电容器控制策略的研究、模糊控制规则的离线优化训练,由模糊控制器的输出控制晶闸管投切电容器的触发脉冲来补偿电动汽车充电站接入电网后的无功功率,通过MATLAB模糊控制Fuzzy工具箱和SIMULINK软件进行仿真试验,仿真结果证明TSC晶闸管投切电容器无功补偿控制策略可以实现对电动汽车充电站电网无功功率的补偿;并利用MATLAB软件人工神经网络对模糊控制规则进行离线训练的编程,从训练结果图中可以看出只有个别样本的输出与神经网络的不同,而其他值完全符合。
参考文献
[1] 姜建国,崔纪永,吴泓波. 基于静止无功发生器的电动汽车充电站无功补偿[J]. 化工自动化及仪表.2016(3):313-316.
[2] 高胜昌,王世荣,赵湘津,等. 基于模糊控制理论的变电站电压无功补偿系统的设计[J]. 信息系统工程,2015(5):121-123.
[3] 时国平,钱叶册,许卫兵. 基于模糊-PI控制的SVC系统研究[J]. 自动化与仪器表,2015(3):1-2+4.
[4] 崔静. 含分布式电源和电动汽车的电网无功电压协调控制[D].广州:广东工业大学,2015:9-12.27-30.
[5] 刘颖. 基于“五区图”变电站电压无功的模糊神经网络控制[D].济南:山东大学,2015:21-55.
[6] 商文龍,周玉国,朱丹丹. 模糊PID参数自整定无功补偿方法的研究[J]. 自动化与仪器仪表,2014(12):7-8+12.
[7] 楚皓翔,解大,娄宇成,等. 电动汽车智能充放储一体化电站无功电压调控策略[J]. 电力自动化设备,2014,34(11):48-54.
[8] 丁光彬,朱宏鹏,杨泽明,等. 基于模糊神经网络静止无功补偿装置模型的仿真分析[J]. 水电站机电技术,2014,37(2):18-19+26+71.
[9] 吕二争. 基于模糊控制TSC型无功补偿装置的研究[D].江门:五邑大学,2014:22-30.
[10] 李清慧,周玉国,宋悦,等. 一种改进的模糊控制电容投切方法的研究[J]. 电测与仪表,2013,37(12):79-82+99.
[11] 郝军营,关瑞芳,韦耀杰. 基于模糊控制的分组投切无功补偿控制器的研究与设计[J]. 煤矿机电,2013(1):25-30+33.
[12] 薛红录,吴青峰,党存禄. 电动汽车充电站的谐波治理与无功补偿[J]. 低压电器,2013(20):52-55+61.
[13] 顾越,张晓冬,王强. 基于MATLAB的电动汽车非车载充电机仿真建模[J]. 海军航空工程学院学报,2012,27(3):352-356.
[14] 李均强. 电动汽车充电站谐波分析与充放电系统仿真研究[D].北京:华北电力大学,2012:9-15.
[15] 吴延华,王腾飞. 基于模糊理论的无功补偿控制策略与仿真[J]. 机械与电子,2011(2):45-47+52.
[16] 尹春杰,张倩,刘振,等. 电动汽车充电站供电系统无功补偿与谐波治理[J]. 电力电子技术,2011,45(12):63-65.
[17] 刘森,刘丹,杨国清,等. 静止无功发生器在电动汽车充电站中的应用研究[J]. 电气技术,2011(10):52-55.
[18] 秦国栋,龚仁喜,周希松,等. 模糊控制器在并联电容无功补偿中的应用[J]. 电力电容器与无功补偿,2010,31(3):3-5+9.
[19] 余威. 基于模糊控制的TSC型电弧炉无功补偿系统的研究[D].长沙:中南大学,2010:36-43.
[20] 黄梅,黄少芳,姜久春. 电动汽车充电机(站)接入电力系统的谐波分析[J]. 北京交通大学学报,2008,32(5):85-88.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
科技视界(2016年17期)2016-07-15