时域指标快速设计串联校正环节研究
2017-07-12 19:47李启丙
计算技术与自动化 2017年2期
李启丙
摘要:基于校正环节设计过程复杂、设计效率低下,采用标准二阶响应曲线与上升时间、调整时间、超调时间、峰值时间具有一一对应的关系,根据时域指标快速确定响应函数,S域中,响应函数H(S)、校正环节Gd(S)和被控对像的闭环传递函数Go(S)三者有H(S)=Gd(S)*Go(S)的关系,在已知H(S)和Go(S)函数下可通过函数运算得到Gd(S)表达式。通过MATLAB仿真,验证指标法设计方法正确、可靠。利用此方法在高精度转台控制中运用,控制误差在±0.002°以内,满足设计要求。
关键词:串联校正时或指标 响应函数函数运算
中图分类号:TP13文献标识码:A
Abstract:Based on the correction of the part of the design process is complex, low design efficiency, the standard second-order response and rise time, adjust- time, over time, time to peak with one-to-one relationship, according to the time domain index to quickly determine the response function, the s domain response function H (s), correction link Gd (s) and H (s) = Gd (s) *Go (s) accused of like the closed-loop transfer function G0 (s) three, Gd (s) expression is obtained through the calculation of a function in the function (s) known H (s) and go. Through MATLAB simulation, the design method of the index method is correct and reliable. By using this method, the control error is less than 0.002 degree, which satisfies the design requirement in the high precision turntable control.
Key words:SeriesCorrection; Index Method; Response Function; Function Solution
1.引言
控制系統设计中,对串联校正环节的设计方法较多如根轨迹设计、频率响应设计法。通过对文献[1][2][3][4][5][6][15]分析,设计过程复杂,计算量较大。本文利用响应指标得到响应函数,利用响应函数与原加有校正环节的闭环传递函数进行函数求解运算,可以得到精准的校正函数的表达式。通过MATLAB进行仿真和实验验证,响应曲线和指标均满足设计要求。此方法简化校正环节的设计过程,提高设计效率。
2.响应指标定义
图1是一闭环的控制系统,输出响应表达式可以写成(S域表达式):
Y(s)=(G(s))/(1+G(s) ) R(s)(式1)统响应曲线及相关指标定义如图2。各指标定义如下:
tr为上升时间,系统响应首次到达新设
定点附近的时间。ts为调整时间,系统瞬态衰减时间。Mp超调量,系统响应超过终值的那部分最大值除以系统终值,往往以百分数表示。tp峰值时间,系统到达最大超调点的时间。
通常情况下,我们通过指标要求,获得上升时间、超调量、调整时间等参数值。根据这些指标参数结合式3、式4、式5和式6可以确定标准的二阶响应函数中的ξ、ωn两个参数。实际也就确定了二阶响应函数。
4、串联校正环节设计
图3是标准二阶响应系统框图,图4带有串联校正环节的闭环控制系统框图[12]。
图4中的Go(s)是被控制对像,Gd(s)是串联校正环节。现令图3中Y(s)已经满足响应指标,输出响应为:
7结论
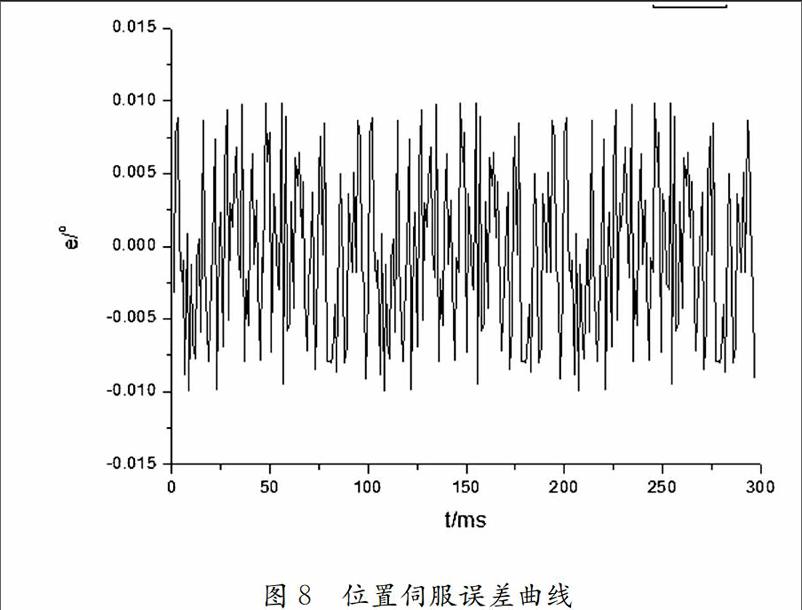
根据时域指标设计串联校正环节,通过响应函数与被设计的校正环节和被控对像的闭环传递函数进行函数求解运算。可快速、准确计算出校正环节。此设计方法过程简单、快速、准确。通过MATLAB仿真实验得出指标法设计方法正确、可靠。经验证此设计方法能够满足精密定位系统的设计。
参考文献
[1]孙秀华.基于MATLAB设计频率法的控制系统校正环节[J].机电一体化,2011(01):33-35.
[2]何建平,陆载德.串联校正器的复域机辅设计[J].中北大学学报(自然科学版), 1987:78-83.
[3]杨平.控制器的标准传递函数设计方法[J]. 化工自动化及仪表, 2010, 37(11):9 -13.
[4]贾银良.直驱轮毂电机调速系统的仿真分析与设计[J]. 北京信息科技大学学报,2013,06(28):5-9.
[5]王柏林.根据时域指标计算水轮机调速器PID参数[J].大电机技术,1986,02:61-63.
[6]任挺,焦自平,徐文科.舰炮随动系统满意PID 控制器设计[J].火炮发射与控制学报,2009,04:55-65.
[7]Gene F.Franklin.自动控制原理与设计[M].北京:人民邮电出版社,2007.
[8]刘金星,李洪文,年朋,孙学士.伺服系统传递函数的全数字测量方法[J].电子测量技术,2010,33(9):8-10.
[9]王帅,陈涛,李洪文,王建立.光电跟踪伺服系统的频率特性测试与模型辨识[J].光学精密工程,2009,17(1):78-84.
[10]宋保业,许琳,卢晓.于Tustin变换的分数阶微分算子近似离散化[J].计算机技术,2015,15(13): 93-95.
[11]白奉天,罗飞路.基于零极点对消的简单整系数数字滤波器的设计与实现[J].电子设计应用,2013,12:34-36.
[12]韦忠海.基于频域的直流电机的串联校正控制器的设计[J].科技传播,2014,3:61-63
[13]李泉溪,焦永功.单片机实现数字校正研究[J].焦作大学学报,2001,02:49-51
[14]张文.应用MATLAB实现自动控制系统的频域法校正[J]. 广东技术师范学院学报(自然科学),2014,03:12-14
[15]李自强,薛美盛.用于PID参数自整定的性能指标仿真研究[J].控制系统,2009,02:30-33
猜你喜欢
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
人民长江(2021年9期)2021-10-18
花火彩版B(2020年5期)2020-09-10
大众摄影(2018年6期)2018-06-19
科技创新导报(2017年23期)2017-10-25
佛山陶瓷(2017年8期)2017-09-06
电脑知识与技术(2016年13期)2016-06-29
能源研究与信息(2015年3期)2015-11-18
能源研究与信息(2014年3期)2014-10-30