无人驾驶农用拖拉机行驶状态信息远程采集系统
2017-07-15 03:04唐宇骆少明黄伟锋郭俊杰王
江苏农业科学 2017年9期
唐宇++骆少明++黄伟锋++郭俊杰++王克强++朱立学


摘要:针对因田间作业路况差异大及不确定因素多而导致无人驾驶拖拉机行驶稳定性差的问题,提出1种基于通用分组无线服务(general packet radio service,简称GPRS)网络的行驶状态信息远程采集系统。该系统由处理器模块、GPRS通信模块、传感器模块、远程数据中心4部分组成,通过安装到拖拉机上的各个传感器模块检测行驶过程中的振动状态、倾斜角度和遭遇障碍物情况,借助GPRS数据业务,以用户数据报协议(user datagram protocol,简称UDP)将监测数据实时传送到远程监控中心。经测试,系统的平均数据传输时间为17.4 s,可正常监测农用拖拉机的倾角超限、振动频率和遇障情况等。该系统使用灵活、信号覆盖面广,为实现无人驾驶农用拖拉机的远程监控提供了技术参考。
关键词:无人驾驶;农用拖拉机;GPRS;单片机;远程监测
中图分类号: S126文献标志码: A
文章编号:1002-1302(2017)09-0168-04
拖拉机是重要的农业机械之一,能显著提高田间作业的自动化程度和工作效率,其应用越来越广泛,智能化程度也越来越高[1-2],已有不少无人驾驶农用拖拉机试验及实际应用的报道[3-4]。无人驾驶拖拉机机组在行走作业过程中遇到恶劣条件和突发情况的概率较大,作业方向和行距难以保证应有的精度,易造成错误作业甚至损伤大片农作物和土地[5-6]。因此,研制信号覆盖范围广、成本低廉且具有一定实用价值的远程多信息监测系统对于实现农用拖拉机全自动作业具有一定的现实意义。
目前,我国农用拖拉机监测系统的数量还很少,大部分监测系统还是以传统的方法采集数据[7]。在拖拉机作业监测领域,采集数据大多是通过传感器,采集精度可以根据选取的传感器而定,而通信是监测过程中的重要环节[8]。由全球移动通信系统(global system for mobile communication,简称GSM)网络发展而来的通用分组无线服务(general packet radio service,简称GPRS)数据传输技术具有覆盖范围广、实时在线、费用低廉等特点,已广泛应用于农业生产。本试验拟研制无人驾驶农用拖拉机行驶状态信息远程采集系统,利用GPRS网络的数据承载能力,通过相关传感器采集振动、倾斜和遇障情况信息并发送至远程数据中心,实现对拖拉机行驶状态的监测。
1系统方案设计
远程采集系统由处理器模块、GPRS通信模块、传感器模块(振动传感器、倾斜传感器与红外传感器)和远程数据中心等4部分组成(图1)。处理器模块以AT89S52单片机为核心,通过异步串行口(universal asynchronous receiver transmitter,简称UART)与GPRS模块连接,实现远程数据通信,通过相应的输入输出(input/output,简称I/O)口与其他模块进行通信,实现系统的全部软硬件功能。
拖拉机的行驶状态信息被传感器实时采集后,通过GPRS分组数据包进行协议转换,然后把这些分组数据包传送到远端的传输控制協议/因特网互联协议(transmission control protocol/Internet protocol,简称TCP/IP)网络。GPRS服务支持节点(serving GPRS support node,简称SGSN)和网关GPRS支持节点(gateway GPRS support node,简称GGSN)利用GPRS隧道协议(GPRS tunnelling protocol,简称GTP)对网络协议(internet protocol,简称IP)分组进行封装,并以端到端方式实现数据分组的发送和数据接收。
1.1单片机与GPRS模块的接口设计
系统使用摩托罗拉公司生产的G20模块实现基于GPRS网络的数据传输,单片机以自带的三线形式异步串行口与G20模块进行数据双向全双工通信[9-10],发送指令,使G20模块完成联网挂接、注册登录和短消息收发等相应操作,同时监听接口,接收来自G20的回传数据。由于AT89S52与G20模块的I/O电平不一致,须通过转换电路进行电平转换后方可进行电气连接,实现数据交换,该部分电路如图2所示。电路的核心是夏普公司生产的PC817高速光耦,实现两端电气隔离与信息耦合传输。AT89S52的发送数据(transmit data,简称TXD)口电流输出能力较弱,须经过7404同相驱动器才能正常点亮光耦中的发光二极管。G20开发板具有通信接口电平切换、通信接口选择、来电显示和信号显示等功能,TXD口通过1个9011三极管实现逻辑反相和驱动电流增强。
1.2单片机与振动传感器的接口设计
系统通过AT89S52单片机的T0口接收由LM393组成的电压比较器的输出信号采集振动的频率信息,接口如图3所示。振动传感电路以RZ801S机械弹性感应器件为核心,拖拉[CM(25]机的机械振动经过RZ801S及应用电路后,转变为振荡电信号,在经过电压比较、电路整形放大后输出给单片机,单片机根据检测到的振荡信号频率可感知到拖拉机行驶过程中的实际振动特点。
1.3单片机与倾斜传感器的接口设计
倾斜传感器在垂直悬挂状态下受到外力作用且偏离垂直角度20°以上时,倾斜传感器内部的开关接点动作,输出开/关的信号;当外力消失后,倾斜传感器内部的开关接点回复至初始状态(图4)。可通过调整2个传感器在拖拉机机架上的安装位置,根据倾斜传感器内部接点断/合信号输出变化来判断拖拉机行驶过程中的倾斜情况,以便及时采取相应的保护措施。当传感器模块的供电电压为直流电(direct current,简称DC)+5 V时,输出端可以与单片机直接相连,通过单片机来检测高低电平,由此感知拖拉机的倾斜角度变化。
1.4单片机与红外传感器的接口设计
系统中的障碍物感测电路核心为红外光收发对管,发射部分由40 kHz振荡器、恒流发射发路、发射探头等组成,振荡器产生占空比很小的窄脉冲。恒流源提供20 mA左右的电流,可降低功耗,提高发射功率。红外线由发射探头聚焦,以散射角小于2°发射。接收部分由红外线接收头、两级放大电路、整形和自动增益控制(automatic gain control,简称AGC)等电路组成。通过调整可变电阻的阻值可以改变检测距离, 接收信号经放大电路放大后可控制图中的继电器断/合,并给AT89S52单片机提供电平信号,即将障碍物的有无变化转换为高低电平的变化(图5)。
2系统的软件设计
无人驾驶拖拉机行驶状态信息远程采集系统的机载端软件设计采用C语言编写,分为单片机主程序和子程序2大部分。主程序主要完成系统中各功能单元的初始化工作(图6),并不断发出控制命令,采集各传感器模块输出的检测信息,实时地将数据通过GPRS网络传送到远程数据中心。子程序实现系统的各个子功能,主要包括振动、倾斜、红外信息采集程序和远程通信程序等模块。
2.1振动信息采集程序
振动传感器模块输出的信号为脉冲信号,这里使用单片机的定时/计数器0(T0)进行定时,采用定时/计数器1(T1)进行计数,即通过设置使T0定时1 s,满1 s时读取T1的计数值并进行换算,可得到拖拉机的机架振动频率数据,单片机采集振动信息的程序流程见图7。
2.2倾斜信息采集
系统通过AT89S52单片机的P1.0、P1.1口读取倾斜传感器模块中的2个机械弹性开关的闭合状态,根据这2个普通I/O口的4种电平状态组合可以判定拖拉机的倾斜状态,该部分程序流程如图8所示。
2.3红外信息采集程序
拖拉机行驶过程中的障碍物检测通过红外传感器模块实现,通过AT89S52单片机的P1.2、P1.3口控制红外发光二极管的发光状态,使用单片机的外部中断0接口接收经过放大整形处理后的红外反射信号,即在设定距离内遇到障碍物时会触发单片机的1次外部中断,在中断服务程序中实现遇障状况的记录,该部分程序流程如图9所示。
2.4远程通信程序
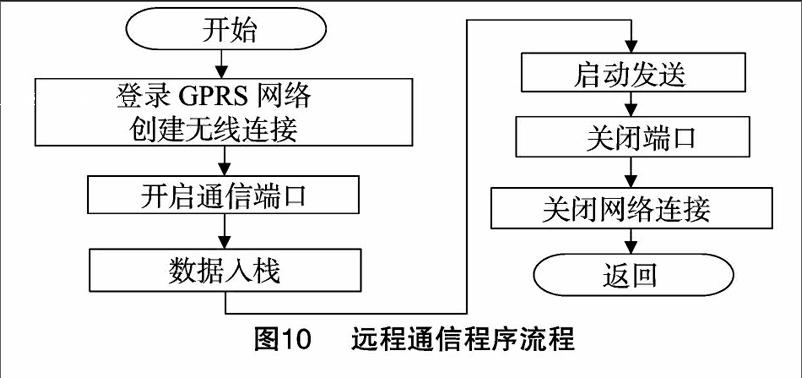
采集系统的远程通信功能以发送GPRS远程数据信息[11]的方式实现,通过单片机向G20发送以ASCⅡ字符代码组成的标准格式的AT(attention)指令实现,首先建立GPRS连接,然后打开1个通信端口,接着将数据压入发送栈以用户數据报协议进行发送,程序流程如图10所示。
3系统运行测试
将本系统安装到具有加装了自动导航功能的东方红LX904拖拉机上(图11)。在广州市从化区街口镇的从化华隆果菜保鲜有限公司的试验田进行测试,远程数据中心放置在该公司连接了Internet的办公楼内。
测试时,首先校准机载系统和远程数据中心的时间,然后让拖拉机沿直线路径以2 m/s的速度行驶约500 m,其间随机统计了12个数据收发时间间隔。结果表明,发送接收时间间隔最大值为19.3 s,最小值为15.7 s,平均发送接收时间间隔17.4 s(表1)。倾角上限预设为25°,遇障距离设为 70 cm,随机记录了数据中心保存的15组监测数据(表2)。
4结论
无人驾驶农用拖拉机行驶状态信息远程采集系统实现了对田间作业拖拉机的振动、倾角和遇障情况的无线远程监测,克服了传统有线传输方式和普通射频电台数传方式的传输距离局限性。结果表明,该系统软硬件设计合理,具有良好的扩展性,在此基础上可以挂接更多的传感器模块,实现对农用拖拉机更多参数的检测,能较好地满足行驶过程中拖拉机多参数监测的需要。该系统使用灵活、安装简便、成本较低,不仅能应用在农用拖拉机远程监测领域,还可以推广到其他田间作业设备的运行状态检测领域,为实现无人驾驶农用拖拉机的远程监控提供了技术参考。
参考文献:
[1]李逃昌,胡静涛,高雷. 基于模糊自适应纯追踪模型的农业机械路径跟踪方法[J]. 农业机械学报,2013,44(1):205-210.
[2]宁建,孙宜田,刘青,等. 智能化精准农业装备的发展趋势[J]. 机电产品开发与创新,2011,24(2):77-79.
[3]武尚君. 农用拖拉机无人驾驶自动直线行走控制方法研究[J]. 内蒙古农业大学学报(自然科学版),2013,34(2):112-114.
[4]Langer T H,Ebbesen M K,Kordestani A. Experimental analysis of occupational whole-body vibration exposure of agricultural tractor with large square baler[J]. International Journal of Industrial Ergonomics,2015,47:79-83.
[5]Cuong D M,Zhu S,Zhu Y. Effects of tyre inflation pressure and forward speed on vibration of an unsuspended tractor[J]. Journal of Terramechanics,2013,50(3):185-198.
[6]丁启朔,潘根兴,丁为民. 稻田耕后土壤结构的描述方法与指标——以南京江浦农场为例[J]. 土壤通报,2011(1):1-6.
[7]徐保岩,宋月鹏,陈苗苗,等. 基于ZigBee和GPRS/GSMDUT的果园信息远程化决策系统设计[J]. 农业装备与车辆工程,2015,53(12):20-24.
[8]任肖丽,陈佳喜,王骥,等. 基于GPRS技术在线环境监测系统的研究[J]. 现代电子技术,2015,38(4):60-62.
[9]Cubero S,Aleixos N,Albert F,et al. Optimized computer vision system for automatic pre-grading of citrus fruit in the field using a mobile platform[J]. Precision Agriculture,2014,15(1):80-94.
[10]潘鹤立,景林,钟凤林,等. 基于ZigBee和3G/4G技术的分布式果园远程环境监控系统的设计[J]. 福建农林大学学报(自然科学版),2014,43(6):661-667.
[11]邢丽丽. 基于3G技术的远程辐射应急监测系统研究[J]. 核电子学与探测技术,2010,30(3):446-450.
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子设计工程(2015年15期)2015-02-27
城市道桥与防洪(2013年5期)2013-03-11