某集装箱装卸搬运机转向控制算法设计
2017-07-18 11:33白雪峰李红勋孟祥德
军事交通学院学报 2017年6期
白雪峰,李红勋,孟祥德
(军事交通学院 国家应急交通运输装备工程技术研究中心,天津 300161)
● 基础科学与技术 Basic Science & Technology
某集装箱装卸搬运机转向控制算法设计
白雪峰,李红勋,孟祥德
(军事交通学院 国家应急交通运输装备工程技术研究中心,天津 300161)
为使某集装箱装卸搬运机在转向过程中两侧车轮之间的偏转关系始终满足车辆的转向特性要求,采用模糊控制作为转向控制算法,完成模糊控制器的设计,得到转向控制程序实现的控制列表。以模拟转向盘指令角度为输入,对各轮在各作业模式和转向模式下的响应及响应过程进行仿真分析,验证了整个转向系统设计的合理性和科学性。
集装箱装卸搬运机;转向系统;模糊控制
某集装箱装卸搬运机转向控制的重点是使转向过程中两侧车轮之间的偏转关系始终满足车辆的转向特性要求。由于难以得到精确的数学模型,考虑到该机械属于低速行驶车辆,机械和液压系统的反应速度相对于处理器来说较慢,再加上液压系统有一定的滞后时间,程序设计还必须考虑左右两车轮的转向关系,以及满足转角大、时间长和转角小、时间短的规律,其转向控制系统采用模糊控制算法来实现转向过程的平稳控制。
1 转向控制系统设计要求和思路
1.1 转向控制系统设计要求
某集装箱装卸搬运机机械转向系统设计要求是各车轮转动的角速度和转角按照驾驶员所设定的作业模式、转向模式及转向盘转动方向与速度,在任何状态下,各转向轮的转角与理论上纯滚动对应的转角误差在1°以内。其控制系统应能将车轮偏转到一定角度;在各工作模式下应具有正常转向、原地转向、蟹行和平移等功能;偏转过程中应保证各车轮之间的偏转角度关系;应提高响应特性和响应一致性;在转向过程中,有故障发生时能够进行紧急制动,并显示相应的故障代码供操作人员及时排除故障[1]。
1.2 模糊控制器设计思路
转向系统模糊控制基本原理如图1所示。根据各轮设定的目标角度值和实际输入值,计算出角度误差e和误差变化率ec的精确值,通过模糊化得出输入变量的模糊值,利用知识库进行逻辑决策,得出输出变量的模糊值,再经过解模糊化过程得出输出变量的精确值,用来控制PWM信号的占空比,进而控制电液比例阀,完成转向过程。
2 模糊控制器的设计
2.1 模糊化
(1)转向轮的主要偏转角度为-50°~50°,所以θx的范围约为-50°~50°,得出偏差的最大值为100°。取e的实际测量范围为[-100,100]。设系统设定的轮偏转值为θ0,实际检测的轮偏角度为θx,则偏转误差e=θ0-θx,为负值时代表轮需向左偏转,为正值时需向右偏转,其语言变量为E,论域为E= {-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6}。
(2)取ec的实际测量范围为[-50,50]。设偏转角度误差两次采样值的变化量是ec(k)=e(k)-e(k-1),为负值时代表转向盘指示需向右转向,为正值是代表需向左转向。其语言变量为EC,论域为EC= {-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6}。
(3)控制系统的输出是控制带反馈电比例多路换向阀流量的占空比信号,占空比信号越大,带反馈电比例多路换向阀流量越大。设占空比信号大小为系统的输出控制量u,其语言变量为U,论域为U= {-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6}。
2.2 各模糊变量隶属度函数的确定
考虑到转向中常用转角为0°~20°,为提高反应速度,获得良好转向响应,本文中采用三角形隶属函数和梯形隶属函数,取E、EC、U具有相同形式的隶属函数。
2.3 模糊控制规则的建立
当误差较大时,控制量的变化应尽量使误差迅速减少;当误差较小时,除了要消除误差外,还要考虑系统的稳定性,防止系统产生不必要的超调,甚至振荡。当误差为负且为负大时,若当误差变化为负,表明误差有增大的趋势,为尽快消除已有的负大误差并抑制误差变大,这时控制量应取负大;当误差为负大而误差变化为正时,系统本身已有减少误差的趋势,所以为尽快消除误差且又不超调,应取较小的控制量;当误差为受中时,控制量应该使误差尽快消除。模糊控制规则见表1。
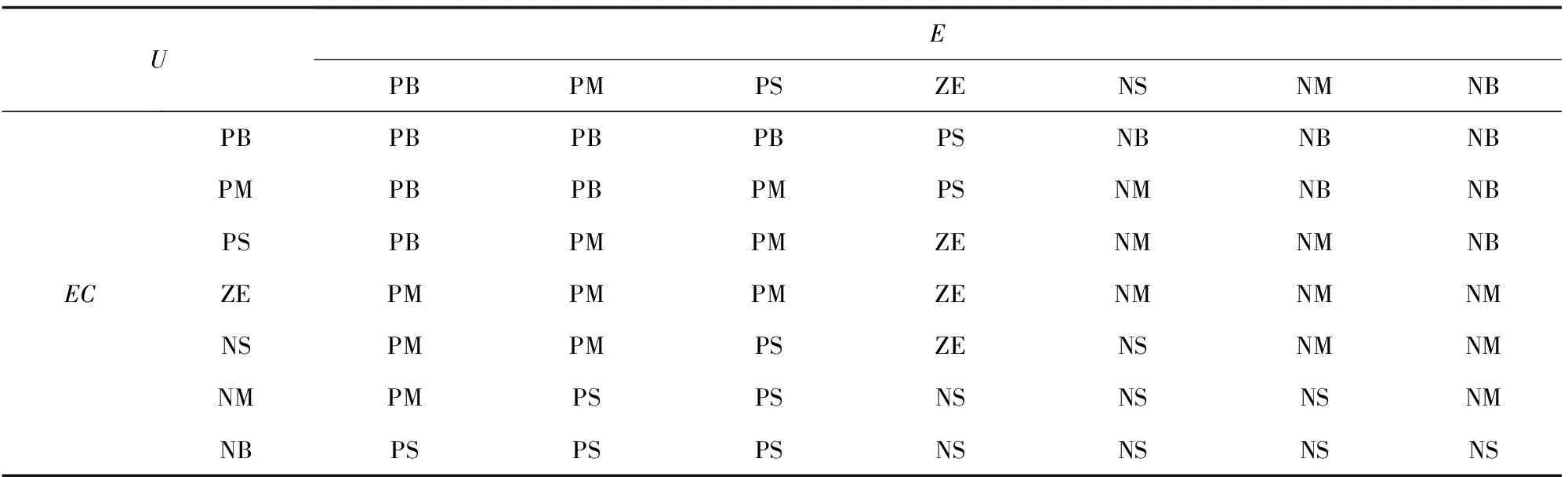
表1 模糊控制规则
具体用模糊语言变量可表示为
IF E=NB AND EC=PB THEN U=NB
⋮
IF E=PM AND EC=PB THEN U=PB
IF E=PB AND EC=PB THEN U=PB
2.4 模糊推理算法的确定
采用曼丹尼(Mandani)极小运算法确定模糊关系[2]。由于采用最大、最小运算符∨,模糊控制规则表包含的每一条模糊条件语句都决定一个模糊关系,它们共有49个:
R1=[(NB)E×(NB)EC]T×(PM)U
⋮
R49=[(PB)E×(PB)EC]T×(NB)U
通过49个模糊关系的“并”运算,可以得到总的模糊关系为R=R1∨R2∨…∨R49。其中:R为模糊关系矩阵;“∨”为取大。
采用合成推理法得控制输出为U=(E×EC)∘R。其中:“×”为求值积;“∘ ”为合成运算符。
2.5 查询表的建立
根据语言变量E和EC论域的量化等级,按照上面合成推理的方法,分别计算不同模糊变量值输入组合情况下的各个输出值,就可以获得一个模糊控制查询表。为了模糊控制系统设计的方便性和计算准确性,使用 Matlab 的模糊逻辑工具箱(Fuzzy Control Toolbox)[3],由隶属度函数和模糊规则表,建立模糊推理系统模型,模糊函数及模糊控制规则如图2和图3所示。在规则观测器中,Matlab以图形化的方式给出了模糊推理的过程(如图4所示)。利用规则观测器得到模糊控制查询表(见表2)。
2.6 模糊的量化处理
(1)e和ec的实际测量范围分别为[-100,100]和[-50,50],设计的论域为[-6,6],有:
则e和ec的量化因子分别为:ke=3/50,kec=3/25。
输入量和量化因子相乘,并按下面两式进行四舍五入,得到其等级值,即成为论域中元素。
(2)控制量的变化范围为[10%,90%],设计的论域为[-6,6],有:
u=ku·U

UE6543210-1-2-3-4-5-6EC6666665445210056665543341000466554322300-1-23655442112-1-1-2-32554432001-2-2-3-41554331000-3-3-4-4054432000-1-3-4-4-5-14432100-1-2-3-4-5-5-24321000-2-3-4-4-5-5-332100-1-1-2-4-4-5-5-6-42100-1-2-2-3-4-5-5-6-6-5000-1-2-3-3-5-5-5-6-6-6-600-1-2-3-4-4-5-6-6-6-6-6
3 转向系统MATLAB/SIMULINK仿真分析
建立带模糊控制器转向系统的仿真模型(如图5所示),并进行仿真分析。
3.1 固定角度输入响应
开始作业时,转向轮需从油缸初始位置时偏转角度-130°调整到正常偏转角度0°。将0°作为输入目标值,得到转向轮响应曲线、模糊控制输入输出参数变化及脉宽调制信号(PWM)变化曲线如图6~图8所示。
由图6可知,转向轮从开始动作至稳定,响应时间为4.2 s,响应时间在可接受范围内,且转向过程中转角没有出现波动,迟滞现象不明显,3.8 s后曲线较为平和,转向平稳。图7为相应的控制其输入E、EC和输出U值变化曲线。结合实际过程可知,前3.8 s左右的时间,实际转角与目标值相差较大,控制器输出的U值较大,转向轮响应快,偏转速度较大;3.8 s末至稳定,实际转角与目标值相差较小,控制器输出的U值小,转向轮偏转速度小,转向较为平和,有效避免了转向粗暴的问题,模糊控制效果良好。由图8可知,前2 s输出PWM占空比保持在0.7,比例阀阀芯开度较大,油液流量大,转向油缸运动速度大。负值代表比例阀换向,用于调整油缸运动速度,克服转向油缸惯性影响,达到转向平稳的目的。
为与实际转向过程相对应,更好地反映转向响应特性,更改四连杆机构仿真初始值,将转向轮偏转角度为0°时作为初始角度进行分析。在实际转向过程中,转向轮的偏转多为小角度偏转,且小角度偏转的响应特性能充分反映转向的灵活性。分别以5°、10°、25°为输入角度得到响应曲线如图9所示。当输入为5°时,转向从开始到稳定响应时间为0.48 s,且曲线变化较为平和,当输入为10°、25°的响应时间分别为为0.71 s和1.53 s。图10为相应的占空比变化曲线,曲线中向下突出曲线为脉宽调制信号(PWM)占空比为负值,代表电比例阀换向,对油缸速度和行程进行调节。
3.2 变角度输入响应
在转向过程中,转向角度使用最多的为左右偏转45°,以转向轮偏转角度为0°作为初始值,初始输入-45°,2 s后以45°作为目标角度得到响应曲线如图11所示。完成整个转向过程至稳定,总响应时间为4 s,在2 s末,转向轮偏转角度刚好达到-45°的转向要求,在跃阶输入下,转向油缸收缩,转向轮往回偏转。图12为控制电比例阀阀芯开度的PWM信号占空比变化值,明显看出在2 s左右输出PWM信号有激增的现象,电比例换向,转向油缸伸长。
但总体来看,响应曲线较为平稳,转向过程较为平和。控制器在较短的时间之内将角度调整到目标角度,转向过程平和,能较好控制角度的调整,这样就保证了在实际的转向过程当中不会感觉到“急转弯”,从而保证了装备转向系统的可靠性、舒适性和安全性。
图13为正弦响应曲线,输入正弦波振幅为45,频率0.2 rad/s,响应稍有延迟和失真,但是没有严重的超调现象。
3.3 仿真分析
将转向控制系统封装成一个输入一个输出的封装体,以输入目标角度代替转向盘输入角度仿真,在正常转向模式下,以运输20 ft集装箱为例,当输入角度为-30°时,各轮偏转响应如图14所示。在此输入下,经过2 s,各轮从初始角度0°响应值目标角度至最终稳定。其中右四轮响应时间较长,左二轮相应相对较快,这是因为转角为负角度(右一转)时油缸收缩,耗时相对偏短,而正角度(左转)时,油缸伸长,耗时相对较长。图15为相应各轮PWM信号占空比变化曲线。图16为输入角度从0°阶跃至30°,6 s末再阶跃到-42°各轮偏转响应曲线,系统整体反应迅速,12 s末各轮偏转到预定角度,变化较为平稳,符合预先设计要求。
4 结 语
本文根据某集装箱装卸搬运机转向系统的控制要求,采用双输入单输出模糊控制算法实现转向控制,其中各轮目标角度与实际角度的偏差和偏差的变化率为模糊控制器的输入变量,调控比例阀流量的PLC输出的PWM脉宽调制信号的控制量(占空比)为输出变量。借助Matlab Fuzzy模块对模糊控制器进行设计,得到模糊控制规则表。以模拟转向盘指令角度为输入,对各轮在各作业模式和转向模式下的响应及响应过程进行分析,分析结果表明整个转向系统符合设计要求。
[1] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,2001:405-408.
[2] 章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,1999:32-41.
[3] 闻新,周露.MATLAB模糊逻辑工具箱的分析和应用[M].北京:科学出版社,2001:139-151.
(编辑:史海英)
Design of Steering Control Algorithm for Container Handling Transporter
BAI Xuefeng, LI Hongxun, MENG Xiangde
(National Emergency Transportation Equipment Engineering Technology Research Center, Military Transportation University, Tianjin 300161, China)
In order to make the deflection between wheels on both sides satisfying the steering requirement in the process of steering, the paper firstly designs fuzzy controller with fuzzy control as the steering control algorithm, and obtains control list of steering control program. Then, by inputting simulated steering instruction angle, it makes simulation analysis on resonse and response process of steering wheels in all kinds of operation modes and steering modes to verify the rationality and scientificalness of the whole steering system design.
container handling transporter; steering system; fuzzy control
2017-01-11;
2017-02-23.
白雪峰(1969—),男,讲师.
10.16807/j.cnki.12-1372/e.2017.06.018
TH122
A
1674-2192(2017)06- 0075- 06
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
科学与财富(2021年35期)2021-05-10
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
科技创新与品牌(2017年9期)2017-10-20
中国新技术新产品(2016年21期)2016-12-08
汽车零部件(2015年5期)2015-01-03