基于瓶装水自动供给装置的设计
2017-07-19 10:08陈纪钦孙大许谢智阳
韶关学院学报 2017年6期
陈纪钦,孙大许,谢智阳
(1.河源职业技术学院机电工程学院,广东河源517000;2.广东机电职业技术学院汽车学院,广东广州510550)
基于瓶装水自动供给装置的设计
陈纪钦1,孙大许2,谢智阳1
(1.河源职业技术学院机电工程学院,广东河源517000;2.广东机电职业技术学院汽车学院,广东广州510550)
设计了一种瓶装水自动供给装置,分析了自适应连续供给式斜面轨道、翻转杠杆、感应式升降台、拉索式升降轨道、带光耦隔离的双继电器电机驱动模块、开源硬件控制板等主要部件的具体设计与实现,解决了瓶装水按指令逐瓶自动送出桌面、磁吸式位置开关信号偶发性控制失灵等问题,实现了出水等待时间小于0.5 s,连续出水间隔小于3 s,一次性装载量不少于20瓶.测试结果表明装置性能稳定可靠,解决了业务洽谈桌或会议桌瓶装水取用不便的问题.
瓶装水;自动供给;自适应斜面轨道;翻转杠杆
目前已有的瓶装水储存取送机构大多都是面向自动售货机设计,如文献[1]提及了一种适合瓶装饮料的螺旋弹簧式储存取送机构,弹簧后端连接一个驱动电机,电机驱动弹簧旋转一圈可以将放置于弹簧缝隙中的瓶体推出掉落到出货口,该机构能装载多款外形各异的饮料瓶,适用范围广;刘海刚等设计了一款无人售货机内部所有装载的瓶体跟随驱动电机旋转,而出口处安装的两个电机则驱动推瓶器将瓶体推进取货口,该装置适合高密度装载圆柱形罐装饮料[2];关祥毅等则优化了一款罐体送出机构,该机构利用直线步进电机驱动推拉杆促使槽轮绕转动中心作往返转动将货道内存储的罐装饮料逐瓶分离并送到出货口[3].
参照上述机构的一些设计思路的基础上,设计了一套能够安装于桌子下方的瓶装水自动供给装置.该装置运用了自适应连续供给式斜面轨道、翻转杠杆及拉索轨道电控升降台等机构,提升了传输稳定性和可靠性;只采用了1个低压直流电机作为动力源,降低了控制系统的复杂性.当按下桌面取水按钮后,机构能将预先存储的瓶装水送出桌面,解决了重要场合取水不便的问题.
1 工作原理与结构组成
瓶装水自动供给装置包含了自适应斜面轨道、翻转杠杆、感应拉索轨道电控升降台等主要部件,系统工作原理见图1.
自适应斜面轨道上存储摆放着一定数量的瓶装水,装置工作时,瓶装水由于重力作用自行向下滚动(见图2).自适应斜面轨道最下方的瓶装水会顺势滚入翻转杠杆中.翻转杠杆能将滚入其中的平躺状态的瓶装水逐瓶翻转为竖直状态,并将其滑落到升降台.升降台上的压力开关感知瓶装水滑落到位后将其举升到等待位.当使用者按下桌面取水按钮后,瓶装水由等待位升至最高位(此时瓶装水露出桌面等待被取用).若压力开关感知瓶装水被取走后,升降台下降至最低位,承托从翻转杠杆翻转过来的下一瓶瓶装水.整套机构动作均由电控系统根据各开关、位置信号来实施控制.

图1 装置总体设计框图

图2 装置整体机构设计
1.1 自适应斜面轨道的设计
装置主要针对X宝350 ml装的纯净水设计,因为这款瓶装水外形并非标准圆柱形,所以必须在斜板上加装支撑导向轨使得瓶身中轴线与斜板平面平行(纵截面见图3),以保证瓶装水能逐瓶平稳向下滑滚.侧挡板与支撑导向轨配合可以保证瓶装水整齐队列在斜板上,不发生横向滑移.

图3 滑滚导轨结构
1.2 翻转杠杆的设计
翻转杠杆实现的功能包括:(1)将滑滚导轨上成排的瓶装水逐瓶分离;(2)将分离出来的瓶装水由水平状态翻转为竖直状态;(3)杠杆机构受升降台控制,升降台下降过程能够压下杠杆翻转翻斗.
翻斗底部靠斜面轨道的一侧设计了隔离板,确保了翻转过程中,斜面轨道上排列的瓶装水被阻挡暂停向下滑滚,实现逐瓶分离.翻斗受杠杆机构撬动,可绕转轴旋转,其上瓶装水在翻转过程中顺利滑落到升降台.翻转杠杆的结构见图4.
1.3 升降台的设计
升降台使用了一款车窗玻璃升降导轨进行改装,在原玻璃固定孔处安装一个内径稍大于瓶装水直径的托杯,托杯底部安装一个升降台压力开关.升降台底部在下降运动的末期会压触翻转杠杆的滚轮端,并撬动翻斗实现翻转运动.1.4升降台电机与拉索轨道的设计

图4 翻转杠杆结构
选用了某款车载玻璃升降电机及拉索轨道轨作为本系统升降台驱动电机与升降导轨[4].该电机为直流永磁有刷电机,标准工作电压为12 V.在举升负载不超过1 kg的情况下,启动电流瞬间不大于2.5 A,工作过程电流不大于1.8 A,升降速度约为0.32 m/s.升降导轨的有效升降高度不小于0.3 m.
1.5 升降台电机驱动模块的设计
电机启动电流比较大、工作过程启停频繁,且不涉及调速控制,本系统采用双继电器的方案来实现换向控制.控制板输出的信号送给光耦隔离元件U1,隔离放大后的信号被用来驱动一个NPN三极管Q1,而Q1则控制了继电器RL1的线圈回路的形成.为了提升驱动模块稳定性,RL1线圈两端连接了一个D1,在U1和Q1之间则布置了一个限流电阻R1(见图5).
若给光耦元件U1的2号端子输入低电压信号,RL1吸合,电流从上到下流过升降台电机,电机正转.相反,若给光耦元件U2的2号端子输入低电压信号,RL2吸合,电流从下到上流过升降台电机,电机反转.
1.6 位置传感器与开关的设计
升降台的停留位置包括下限位(压下翻转杠杆,瓶装水从翻斗滑落到升降台)、等待位(此时已装载瓶装水,该位置靠近桌面,可以缩短系统响应时间)和上限位(此时瓶装水露出桌面,等待用户取走).下限位、等待位、上限位信号分别由安装在与升降台运动轨迹平行的立柱上的磁吸开关获得.当升降台运动时,其一侧安装的钕铁硼强磁铁可以控制相应位置的磁吸开关闭合(见图6)[5].
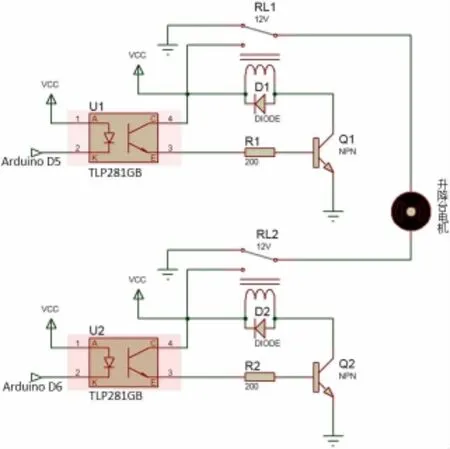
图5 电机驱动模块电路原理

图6 磁吸开关工作原理
取水键信号由安装在桌面的点动式按钮开关获取;升降台压力开关由安装在升降台托杯底部的点动式按钮开关获取;复位键信号由安装在瓶装水加载口内侧的点动式按钮开关获取,打开加载口可以自动完成一次系统重启;警告灯则被设计为绕取水按键周边的灯圈.
1.7 系统控制板的选用
装置使用了两个数字I/O口作为输出端,实现电机运动控制;使用了一个数字I/O口作为输出端,实现警告灯闪烁控制;使用了3个数字I/O口作为输入端,获取升降台位置;使用一个数字I/O口作为输入端,获取升降台杯托负载信号;使用了Reset端口,实现装置重启复位.选用的开源硬件Arduino UNO R3开发板具有6个模拟I/O口A0~A5,14个数字I/O口D0~D13,1个重启接线端子,1个电源输入口(推荐7~12 V),1个USB口(程序烧录或测试供电用),不仅能完全满足当今使用,也为未来升级改造预留了一定空间.
Arduino是一款开源电子原型平台,其专有开发环境简单清晰,硬件板成熟稳定且扩展方便,配套软硬件资源非常丰富且易于使用,非常适合选用作为本装置及类似装置的系统控制板[6-7].
装置Arduino板的D5和D6两个端子与电机驱动模块两个光耦对应的端子相连;D7用于警告灯信号输出;D8用于采集桌面取水开关信号;D9~D11分别用于采集下限位、等待位和上限位的信号;D12用于采集升降台压力开关信号(见图7).
2 控制逻辑的设计及系统测试

图7 系统控制板与外围电路的连接
2.1 逻辑设计
系统的控制逻辑按照图8的流程进行设计,并在Arduino IDE中将编译好的系统控制程序烧录到控制板.
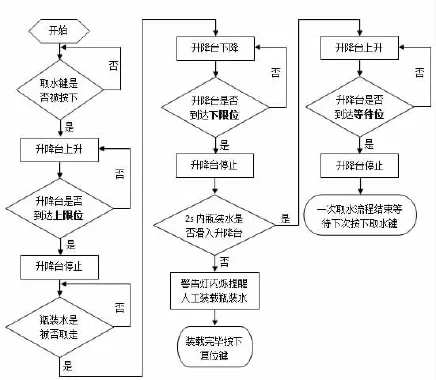
图8 系统控制流程图
2.2 系统测试
将设计制作好的各模块按系统总体设计进行组装,并开机测试(见图9).功能测试结果显示:出水等待时间(从客户按下取水按钮到瓶装水升出桌面停止位置的时间)小于0.5 s;连续出水时间间隔(上一瓶水取走到下一瓶水升出桌面停止位置的时间)小于3 s;装载便利,装载20瓶瓶装水的时间小于30 s;可以容纳瓶装水数量超过20瓶.

图9 装置测试实物图
稳定性测试结果显示:环境温度约25°C时,系统连续运行100个工作循环(每个工作循环装载20瓶水,并按下取水按钮逐瓶取出),出现故障为零.
3 结语
(1)运用瓶装水自身重力实现连续供给,运用杠杆机构控制翻斗运动,这些设计有效减少了驱动电机数量,避免了多动力源机构的相互运动干涉问题.
(2)磁吸开关是一款非接触式开关,将用于行程检测,特别适合中间位置较多的场合.若检测物运动速度比较快,建议在程序中增加冗余指令.如本系统中的升降台到达等待位触发该开关后,单片机在连续100 ms内一直向电机发送停转指令.
(3)装置设计过程一定要考虑使用者的操作体验,如装置设计的等待位可以有效缩短出水等待时间;设计的缺水装载提醒、系统重启等功能可以提升系统鲁棒性.
[1]李养旺.自动售货机易拉罐出罐机构研究[J].机电技术,2005(2):73-76.
[2]刘海刚,王刚,高建彪.一种新型无人售货机的设计与分析[J].食品与机械,2016,32(3):109-112.
[3]关祥毅,刘恩德,隋承海,等.自动售货机罐装送出机构设计优化的研究[J].哈尔滨商业大学学报,2007,23(6):747-749.
[4]王剑.升降系统布置以及零件设计[J].汽车实用技术,2014(4):72-77.
[5]徐永,徐善堂.基于双干簧管的矿用磁性接近开关设计[J].工矿自动化,2012(10):26-28.
[6]彭攀来,马娅婕,刘智旸.基于Arduino的移动机器人控制系统设计[J].自动化与仪表,2016(3):1-4.
[7]杨继志.Arduino的互动产品平台创新设计[J].单片机与嵌入式系统应用,2012(4):39-41.
Automobile,Guangdong Mechanical and Electrical Polytechnic,Guangzhou 510550,Guangdong,China)Abstract:One kind of automatic feeding device for bottled water has been designed.The design and implementation of the main components,such as adaptive continuous feeding inclined rail,turnover lever,cable lifting track,induction lifting platform,dual relay motor drive module with opt coupler isolation,control board of open source hardware and the like,were introduced.Bottled water was automatically sent to the desktop one by one follow the orders,and the magnetic suction position switch signal control failure by accident and so on has been solved.Waiting time is less than 0.5 s,the continuous time interval is less than 3 s,and the loading capacity is not less than 20 bottles.The use of bottled water for business negotiation table or conference table has been improved.
Design of Automatic Feeding Device for Bottled Water
CHEN Ji-qin1,SUN Da-xu2,XIE Zhi-yang1
(1.School of Mechanical and Electrical Engineering,Heyuan Polytechnic,Heyuan 517000;2.School of
bottled water;automatic supply;adaptive inclined rail;turnover lever
G80-05
A
1007-5348(2017)06-0040-05
(责任编辑:欧恺)
2017-03-19
陈纪钦(1983-),男,广东梅州人,河源职业技术学院机电工程学院讲师,硕士;研究方向:智能控制机械装置及汽车.
猜你喜欢
青少年科技博览(中学版)(2022年10期)2023-01-07
科学大众(2021年8期)2021-07-20
演艺科技(2021年5期)2021-06-05
演艺科技(2020年5期)2020-07-15
装备制造技术(2020年12期)2020-05-22
铁道通信信号(2020年12期)2020-03-29
技术与市场(2020年3期)2020-03-26
酒·饮料技术装备(2018年1期)2018-04-28
党的生活(黑龙江)(2017年10期)2017-11-09
上海文化(新批评)(2014年5期)2014-02-12