基于局部Hough变换的机场跑道检测方法
2017-07-21 10:04巩向武郭皇皇
装备学院学报 2017年3期
焦 姣, 巩向武, 郭皇皇
(1. 装备学院 研究生管理大队, 北京 101416; 2. 装备学院 复杂电子系统仿真实验室, 北京 101416)
基于局部Hough变换的机场跑道检测方法
焦 姣1, 巩向武2, 郭皇皇1
(1. 装备学院 研究生管理大队, 北京 101416; 2. 装备学院 复杂电子系统仿真实验室, 北京 101416)
针对可见光遥感图像中的机场跑道检测问题,提出了一种基于方向预判的局部Hough变换方法。通过频谱能量楔向采样,确定频谱图中对能量贡献起主导作用的系数分布角度范围与机场跑道的对应关系,得到跑道的方向预判结果;利用方向信息对Hough变换角度的取值范围进行压缩,通过局部Hough变换进行直线检测得到机场跑道。实验结果表明:该方法能够较好地消除复杂背景中地物的干扰,快速准确地检测出机场跑道。
频谱分析;边缘检测;局部Hough变换;跑道检测
遥感图像中的机场跑道具有较为明显的特征:跑道通常表现为平直且边沿较为齐整的带状,长宽具有一定的范围,边缘线一般为平行线对;跑道区域的灰度级通常高于附近背景区域,具有与周围环境较为明显的差异。这些特征可应用于跑道检测与提取。基于此,许多学者进行了研究。文献[1]首先对图像进行分割,然后利用各向异性扩散和Frangi滤波去除噪声干扰,检测得到可能的跑道信息,最后利用目标的形状和颜色特征提取出跑道。文献[2]首先利用形态学方法进行图像增强,然后采用最大类间方差法进行阈值分割,提取得到机场连通域,经过细化之后通过2次Hough变换提取跑道。文献[3]根据机场跑道在各波段所具有的不同灰度特征及其直线特征进行跑道定位,再对跑道关键点进行区域生长。文献[4]利用最大连通域提取得到机场区域,然后通过边缘提取和Hough变换确定跑道。这些特征在复杂背景下存在的损失容易造成目标漏警和虚警,而传统Hough变换的计算量也非常大。
本文首先通过频域能量分布分析确定机场跑道的大致方向,然后将Hough变换中的角度取值限定在较小的范围内,减少了Hough变换的计算量,同时准确检测出了机场跑道。本文提出的方法包括以下几个步骤:(1) 采用改进的中值滤波策略对图像进行降噪处理;(2) 通过阈值分割得到二值图像;(3) 采用Canny算子进行边缘检测;(4) 将图像变换至频域通过能量谱楔状采样峰值分析得到跑道的大致方向;(5) 对边缘图像进行局部Hough变换得到机场跑道的检测结果。整个流程如图1所示。
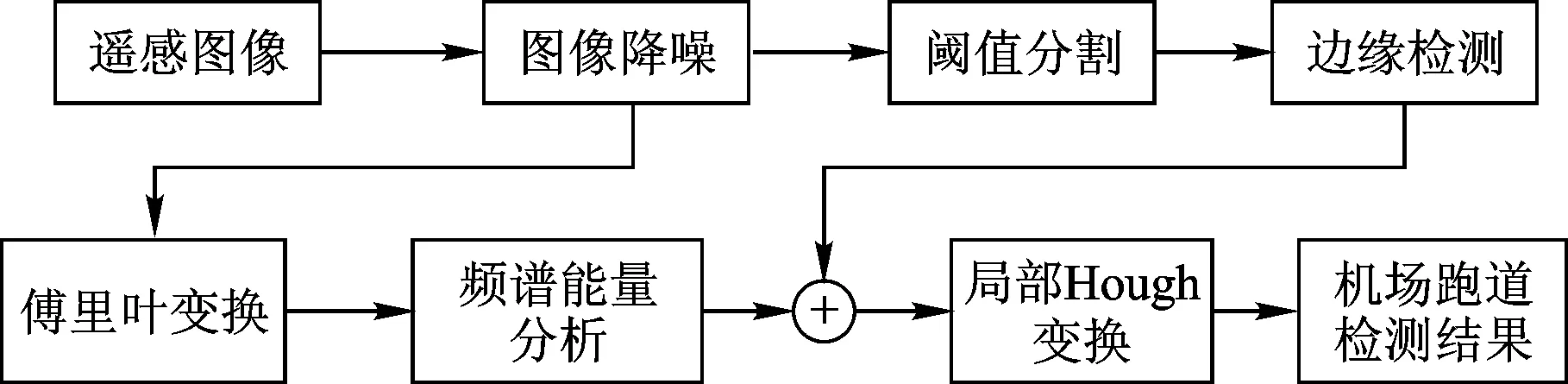
图1 机场跑道检测流程
1 图像预处理
1.1 图像降噪
遥感图像在拍摄的过程中难免会存在一些噪声,一般是突发噪声点。为了更好地提取目标,首先需要对图像进行降噪处理。目前,图像降噪有许多成熟的滤波器,其中中值滤波对随机噪声具有非常理想的降噪能力,但其效果依赖于滤波窗口大小——窗口太大会导致边缘模糊,太小则去噪效果不理想。本文采用一种改进的中值滤波策略,即对图像进行扫描,判断像素点是否是滤波窗口覆盖下邻域像素的极小值或者极大值。如果是,依然采用普通中值滤波进行处理;如果不是,则不予处理。由于噪声点基本都属于邻域极值,利用改进的方法能够在几乎不对边缘造成影响的情况下有效去除突发噪声点,尤其是消除椒盐噪声。
1.2 阈值分割
一幅图像可以看作由前景与背景构成,可以通过统计学方法获取分割阈值,使前景与背景尽可能分离。一般而言,机场具有与背景较为明显的灰度差异,可以采用一种自适应阈值分割方法对遥感图像进行二值化操作,即完成机场与背景的分割。本文采用Otsu方法[5]。Otsu阈值分割方法又称最大类间方差法,该方法计算简单,在一定条件下不受图像亮度与对比度变化的影响。

的像素分为C2。设σB(t)表示阈值为t时的类间方差,通过求最大值可得到最佳阈值T。
(1)
σB(t)2=
p1(t)(m1(t)-mg)2+p2(t)(m2(t)-mg)2
(2)
式中:m1(t),m2(t)分别是C1和C2的像素平均值;p1(t),p2(t)分别是相应的概率密度;mg是全局像素均值。
如图2为灰度图像的直方图,使用Otsu法求得T=0.549,转换在[0,255]之间为140.0,阈值T位于2个峰值之间的波谷位置。
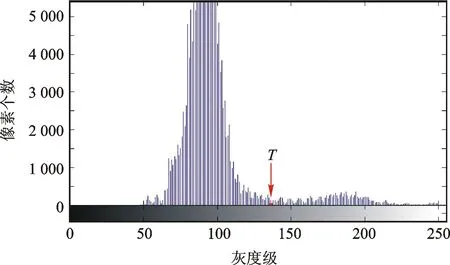
图2 灰度图像直方图
1.3 边缘检测
Canny是常用的边缘检测算子,它能够在噪声抑制和边缘精确定位之间取得最佳折中。本文采用Canny算子进行边缘检测,其原理是:在x、y方向求一阶导数,将其组合为4个方向的导数,这些方向的导数达到局部最大值的点就是构成边缘的候选像素点。具体算法如下[6]:(1) 用高斯滤波器对图像进行平滑滤波;(2) 用一阶偏导有限差分来计算梯度的幅值和方向;(3) 对梯度幅值进行非极大值抑制;(4) 用双阈值算法对边缘进行检测和连接。
遥感图像背景通常较为复杂,存在多种地物,完成图像分割操作之后依然存在背景残留,导致边缘提取结果中存在部分背景连通体边缘。因此,本文对边缘提取结果进行简单的连通体筛选,滤除较小的连通体边缘。
2 基于频谱能量分析的方向预判
图像的傅立叶变换是将图像从空间域变换到频率域,也就是将图像的光谱能量分布f(x,y)变换为频率能量分布F(u,v),频谱图能够很好地反映出不同的频率成分,也反映了图像能量随频率的变化情况[7]。在图像的傅里叶频谱中,亮点的明暗表征了该点与邻域点差异强弱,亮度强的点梯度值较大。如果频谱图中亮度强的点较多,图像通常较为尖锐,具有较为剧烈的灰度变化趋势,边界分明并且边界处像素差异较大。通常图像中存在较多的水平与垂直方向线条,因此频谱图中亮点多集中于水平与垂直方向,原图像中的水平边缘与频谱图中的竖直亮线相对应,而竖直边缘则与水平亮线相对应。频谱图中靠近中心的区域为低频部分,对应原图像的慢变化分量;远离中心的区域属高频部分,与原图像中灰度级变化较快的分量相对应,常表征图像的细节,如边缘和噪声等。
2.1 频谱能量分析
将图像进行二维傅里叶变换,如图3所示[8]。傅里叶变换得到的频谱数据并非以零频为中心进行排列,而是按照原始的计算顺序,因此零频位于频谱图角上。利用频谱周期性特点,通过平移可以将零频移至图像中心位置,低频分量从频谱图中心向四周扩散;同时,高频分量则分散在四周,有利于对图像特征进行分析。
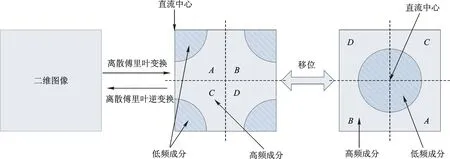
图3 图像频谱坐标移位示意图
2.2 跑道方向预判
在遥感图像中,各类地物特征线条表现出多方向性,且随机分布于图像中各个位置。根据傅里叶能量谱的自配准性,具有相同方向的特征线不受位置约束,其能量贡献会叠置在一起,并在频谱图中集中表征为通过中心且垂直于原特征线方向的条带。若原图像中存在大量的某一角度的边缘线,则其频谱能量的楔状采样在θ+π/2具有较大的峰值。遥感图像中机场线条较为单一,分布在图像中的某一个位置,通过分析楔向能量分布的峰值位置即可大致确定图像中机场的方向。
采用极坐标系进行频谱能量E(x,y)分析,假设(r,θ)为(x,y)平面上的极坐标
(3)
通过积分可以得到各扇形区域中的频谱能量分布,离散二维图像可用求和来替代积分形式。在相应的扇面上对r求和
,...,n
(4)
考虑经过平移的频谱图中频谱能量系数关于原点呈对称分布,只取上半部分的频谱系数进行楔向分布能量采样,根据对称性将频谱图上半部分划分为6个小区域,分别做6个方向的能量统计,划分角度为:[60°,90°),[30°,60°),[0°,30°),[-30°,0°),[-60°,-30°),[-90°,-60°),如图4所示。

图4 能量谱楔状采样
3 基于方向信息的Hough变换
3.1 Hough变换基本原理
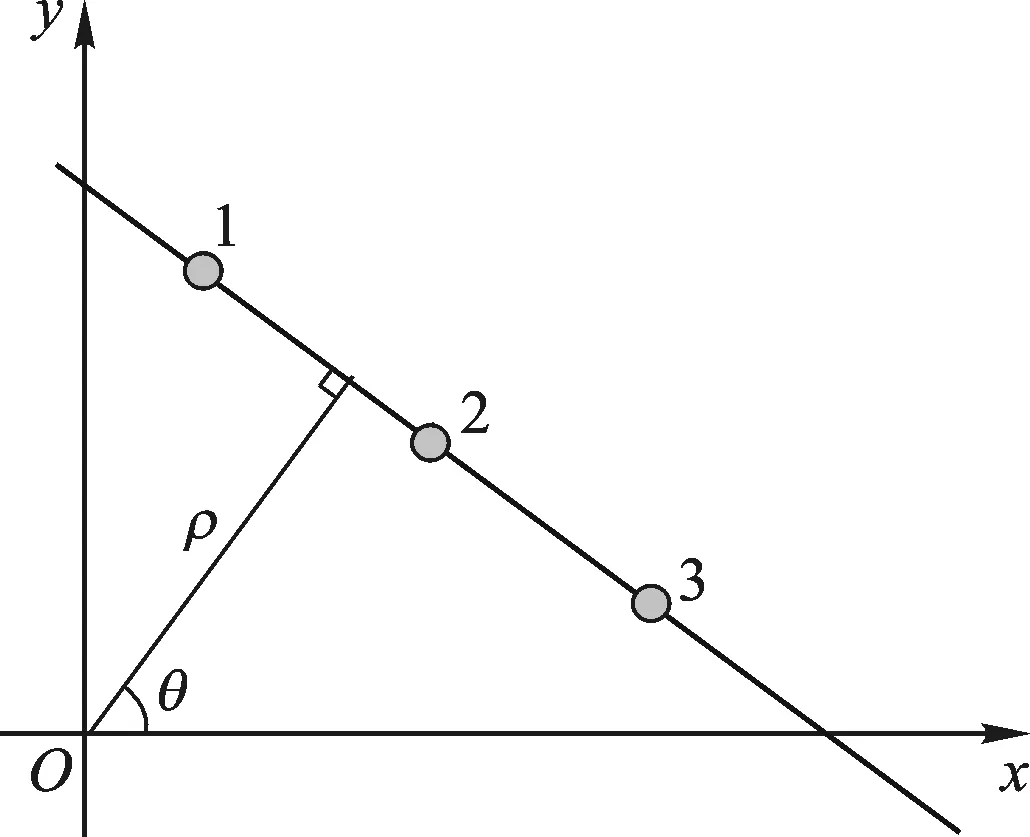
Hough变换是一种常用的提取直线的方法,实质上是一种投票机制,对参数空间中的点进行投票,投票值超过阈值则认为有足够多的点位于该参数点所决定的直线上。该方法具有受直线是否存在断点和噪声影响小的优点。经过Hough变换,可以得到直线长度、端点、夹角,以及直线间垂直距离等参数。Hough变换的基本思想是点-线的对偶性,它把图像空间中直线的检测问题变换到参数空间中点的检测问题。变换关系为
ρ=xcosθ+ysinθ
(5)
式中:ρ为坐标原点到直线的距离;θ为直线的法线与x轴的夹角。图像空间x-y中的每个点与参数空间ρ-θ中的一条正弦/余弦曲线相对应,且同一直线上的点所对应参数空间中的曲线均交于一点。将参数空间离散化,统计过参数空间每个点[ρ,θ]的曲线条数,θ值相同则表征2条平行的直线。如图5所示,空间中有3个点,分别对各点求过该点的N个方向直线的[ρ,θ]坐标。通常N=180,对应的检测角度精度为1°。图中3个点的[ρ,θ]曲线相交于点[ρ0,θ0],该交点即表征经过这3个点的直线。Hough变换直线检测对经过同一点的曲线数进行累加,超过一定阈值的[ρ,θ]坐标,即可判定此处存在一条直线。
a) 图像空间
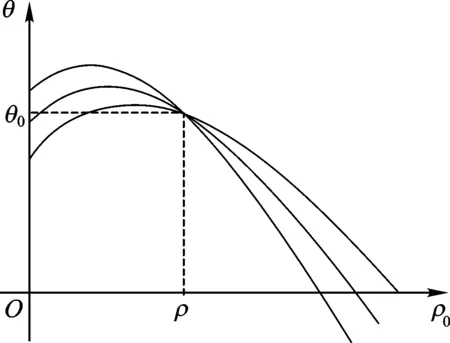
b) 参数空间图5 Hough变换原理图
3.2 跑道检测
遥感图像中的跑道一般为具有一定宽度的平行线对,且具有显著的方向性,与其他地物目标有明显区别[9]。根据跑道边缘线特征,结合方向预判信息,对边缘检测结果进行局部Hough变换。传统Hough变换参数θ的取值范围是[-90°,90°),经过边缘检测提取到的边缘像素点都要参与运算,具有计算量大的缺点。本文方法利用频谱能量分布分析得到机场跑道方向信息,将θ的取值范围压缩到跑道方向邻域内的局部小区间[θ1,θ2)内,将对θ的全局投票简化为局部投票,能有效减小计算量并准确检测到机场跑道。
机场跑道边缘一般为基本等长的平行直线,由于背景粘连、成像条件等原因容易出现边缘断裂。本文对Hough变换检测出的直线进行扫描,根据平行线对距离和局部灰度分布信息对部分短线段进行区域生长,得到较为完整的跑道。
4 实验结果及分析
如图6所示,选取多幅机场遥感图像进行实验验证,统一图像大小为800×800。实验硬件环境为IntelCorei5-4200U,CPU主频1.60GHz,软件环境为MATLABR2014a。这3处机场具有较好的代表性和差异性,机场背景主要以农田和村庄为主:图6a)中有一条跑道,跑道一侧有一条滑行道;图6b)中机场较为复杂,有2条平行跑道;图6c)中有2条“X”形跑道。

a) 北京西苑机场

b) 台湾桃园机场

c) 芷江机场图6 机场遥感原图像
4.1 跑道方向预判结果及分析
首先针对原始图像,进行图像降噪以及阈值分割;然后采用Canny算子进行边缘检测,滤掉过小的连通体;再通过傅里叶变换将降噪处理后的灰度图像变换至频域,提取频谱图中对能量贡献起主导作用的系数分布角度范围,得到跑道的方向预判结果。对图6中3幅图像分别进行处理,得到阈值分割结果、边缘检测结果、对应的频谱图、频谱图6个方向的楔向能量统计结果以及机场跑道方向预判结果,如表1所示。表1中第四列为条柱图,条柱1~6分别对应[60°,90°)、[30°,60°)、[0°,30°)、[-30°,0°)、[-60°,-30°)、[-90°,-60°)6个角度范围。除去频谱图中的水平与垂直亮线之外,一般还存在通过频谱中心的斜向亮色条带,具有突出的能量集中,该条带表现为楔向能量累计峰值,与机场跑道方向的角度对应关系满足θ+π/2。
根据能量分布检测到图6a)对应的能量统计图中条柱1为峰值,相应角度范围为[60°,90°),则机场跑道方向大致在[-30°,0°);图6b)对应的能量统计图中检测到条柱5为峰值,相应角度范围为[-60°,-30°),则跑道方向大致在[30°,60°);图6c)跑道为“X”形,对应的能量统计图中检测到条柱2为峰值,条柱3能量累计值与条柱2相差0.3%,相应的角度范围分别为[0°,30°)、[30°,60°),则跑道方向分别在[-90°,-60°)、[-60°,-30°),据此可以通过阈值设置检测得到双峰值,提取“X”形机场跑道。

表1 图6a)~图6c)机场跑道方向预判结果
4.2 机场跑道检测结果
得到方向预判信息后,将图6中3幅图像的边缘图像作为输入,分别利用基于方向预判信息的局部Hough变换和传统Hough变换方法进行跑道检测,结果如图7~图9所示。跑道检测结果以红色线条作为标记。
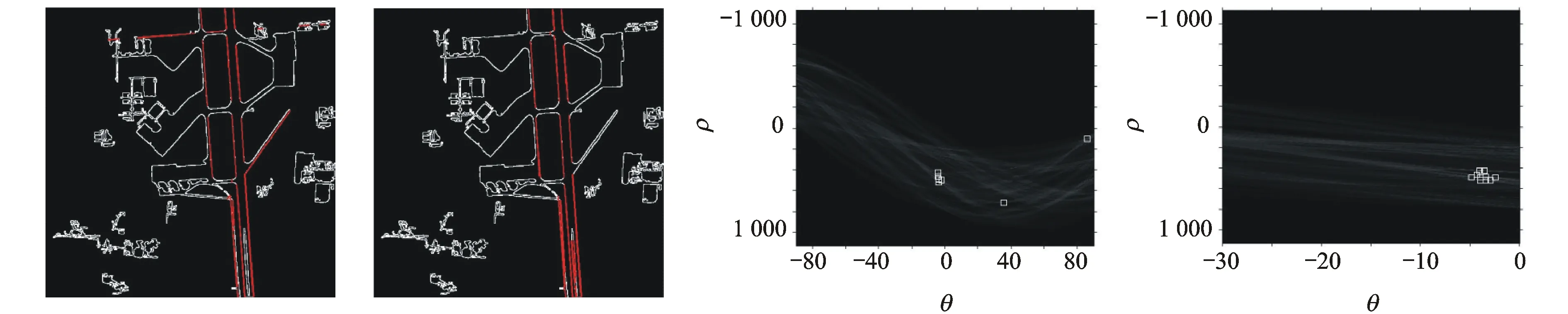
a) 全局Hough变换检测结果 b) 本文方法检测结果 c) Hough变换全局投票 d) Hough变换局部投票图7 图6a)机场跑道检测结果

a) 全局Hough变换检测结果 b) 本文方法检测结果 c) Hough变换全局投票 d) Hough变换局部投票图8 图6b)机场跑道检测结果

a) 全局Hough变换检测结果 b) 本文方法检测结果 c) Hough变换全局投票 d) Hough变换局部投票图9 图6c)机场跑道检测结果
图7~图9中的图像a)分别为图6中机场图像的全局Hough变换检测结果,图像b)分别为局部Hough变换的检测结果,图像c)和图像d)分别为Hough变换全局和局部投票结果。从上述结果可以看出:图6a)中由于全局变换的缺点,容易检测出虚假直线;图6b)中机场跑道结构较为复杂,缩小检测范围可以得到更为精细的跑道检测结果;图6c)中机场存在“X”形跑道,全局检测仅能检测到一个方向的跑道,而局部检测可以检测到“X”形跑道。下面对Hough变换在时间效率上的改进进行验证。分别对局部与全局Hough变换跑道检测所用时间、预处理时间以及总耗时进行统计。结果如表2所示。

表2 跑道检测耗时测试结果
分析表2测试结果可知,局部Hough变换引入的预处理开销略大于全局变换,但是通过参数范围压缩,大大降低了Hough变换本身的计算量,使得跑道检测时间明显优于全局Hough变换;同时,综合性能也较全局变换更优。综上所述,本文方法可快速准确地检测出机场跑道。
5 结 束 语
本文通过频域能量楔向采样确定能量峰值与机场跑道方向的对应关系,将Hough变换由全局投票简化为局部投票,大大减少了Hough变换的计算量,快速准确地检测出机场跑道。下一步工作需要研究自适应阈值分割技术,消除复杂背景干扰,进一步提高跑道的检测率和算法的鲁棒性。
References)
[1]TRIPATHI A K,SWARUP S.Shape and color features based airport runway detection[C]//IEEE International Advance Computing Conference (IACC).Ghaziabad,India:2013:836-841.
[2]董书勇,吴巍.一种遥感图像中机场跑道的提取方法[J].武汉理工大学学报(信息与管理工程版),2006,28(7):152-155.
[3]甘博,吴秀清,胡拥军.统计的Hough变换在机场遥感图像分割中的应用[J].计算机工程,2002,28(8):264-265.
[4]陈旭光,林卉.遥感图像中机场目标的识别方法[J].计算机工程与应用,2012,48(25):194-197.
[5]阳波.基于最大类间方差遗传算法的图像分割方法[J].湖南师范大学自然科学学报,2003,26(1):32-36.
[6]冈萨雷斯.数字图像处理 [M].3版.阮秋琦,译.北京:电子工业出版社,2012:289-295.
[7]吴桂平,肖鹏峰,冯学智,等.利用频谱能量进行高分辨率遥感图像地物识别[J].武汉大学学报(信息科学版),2011,36(11):1294-1297.
[8]吴桂平.高分辨率遥感图像频谱能量分析与典型地物特征识别研究[D].南京:南京大学,2011:40-56.
[9]艾淑芳,闫钧华,李大雷,等.遥感图像中的机场跑道检测算法[J].电光与控制,2017(2):43-46.
(编辑:李江涛)
Airport Runway Detection Based on Local Hough Transform
JIAO Jiao1, GONG Xiangwu2, GUO Huanghuang1
(1.Department of Graduate Management, Equipment Academy, Beijing 101416,China; 2.Science and Technology on Complex Electronic System Simulation Laboratory, Equipment Academy , Beijing 101416,China)
In this paper, a local Hough transform method based on direction prediction is proposed for the airport runway detection of visible remote sensing image. The runway direction prediction is achieved by determining the correspondence between the coefficient distribution angle range with a dominant function in energy contribution and the airport runway. With the use of the direction information of the runway, Hough transformation range is reduced, and the airport runway is obtained via the line detection through local Hough transformation. Experiments show that, with this method, the disturbance from the ground objects in complex background can be better removed, and the airport runway can be detected with great speed and accuracy.
spectrum analysis; edge detection; local Hough transformation; airport runway detection
2017-04-17
部委级资助项目
焦 姣(1988—),女,博士研究生,主要研究方向为空间信息处理和遥感图像处理。jiaojiao_nk@163.com
TP751
2095-3828(2017)03-0032-06
A DOI 10.3783/j.issn.2095-3828.2017.03.006
猜你喜欢
建材发展导向(2022年14期)2022-08-19
中国水运(2022年4期)2022-04-27
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年6期)2021-03-09
通信产业报(2018年40期)2018-01-22
移动通信(2017年3期)2017-03-13
通信产业报(2016年44期)2017-03-13
筑路机械与施工机械化(2014年7期)2014-03-01
现代电子技术(2009年13期)2009-08-31
雕塑(1999年2期)1999-06-28