导航离线复算中的零点偏差估算方法*
2017-07-21 05:13范金华宋建英
航天控制 2017年3期
范金华 彭 杰 宋建英
太原卫星发射中心,太原 030027
导航离线复算中的零点偏差估算方法*
范金华 彭 杰 宋建英
太原卫星发射中心,太原 030027
为了验证弹上导航计算方案的正确性,需要研究遥测零点与弹上零点的一致性问题。通过视加速度建立零点偏差与导航速度偏差的关系式,给出一种基于导航方程的零点偏差估算方法。以某平台式惯导系统为例,给出具体的导航计算过程,包括视速度补充计算、工具误差补偿计算和发射惯性系导航计算。基于试验数据的计算结果表明,本文方法能够有效估算出遥测与弹上之间的导航零点偏差,对离线导航计算结果进行补偿后与弹上导航计算结果趋于一致,从而验证了弹上导航计算方案的正确性。 关键词 零点偏差;惯导系统;导航计算
在导弹飞行试验中,遥测、外测等设备通常均参与试验,它们之间存在一个时间零点的统一问题。遥测零点、外测零点及弹上零点通常是不一致的。这种时间未对齐误差给飞行试验结果的分析与验证带来了困难和挑战。除了从硬件设备上进行精确对时之外,还需要从数学、物理等方法上对时间对齐误差加以研究。遥测和外测零点偏差可以通过制导工具误差分离[1]等方法加以研究,而本文则主要研究遥测零点与弹上零点的一致性问题。
根据飞行试验遥测大纲,遥测参数以控制系统发送的时统零点信号作为时间零点,并作为遥测数据处理结果报告所提供数据的时间零点。从控制系统发出时统零点信号到地面遥测设备接收到该信号存在一定的延迟。虽然在进行遥测信号处理时,进行了时间修正,将遥测参数统一到时统零点,但是遥测处理出来的数据零点与控制系统发出的时统零点可能存在一定的偏差。此外,从控制系统发出时统零点信号到弹上真正开始导航计算存在一定的延迟。这些原因导致了导航计算零点与遥测时统零点的偏差,这个偏差导致离线导航计算结果与弹上导航计算结果的不一致,具体表现在速度与位置的偏差上。因此,需要研究导航计算零点与遥测时统零点的偏差估算方法,以更好地支持飞行试验结果的分析和鉴定工作。
针对这个问题,本文给出一种基于导航方程的零点偏差估算方法。该方法通过视加速度建立零点偏差与导航速度偏差的关系式,然后再通过这个关系式估算出零点偏差。估算结果通过将零点偏差进行补偿后的导航计算结果进行检验。
1 导航零点偏差估算方法
首先,根据视加速度的定义以及它与加速度的关系,建立时间增量与速度增量的关系式。然后,基于这个关系式导出导航零点偏差与速度偏差的关系式。最后,针对某平台式惯导系统,给出具体的导航计算过程,以便根据前面的关系式估算出导航零点偏差。
1.1 时间增量与速度增量的关系
根据导数的定义,视速度增量与视加速度之间存在如下关系:

(1)
令ΔW→0, Δt→0,则式(1)为

(2)
根据视加速度的定义,有

(3)
将式(3)两边同时乘以dt,有
dV(t)=dW(t)+g(t)dt
(4)
令ΔV→0, ΔW→0, Δt→0,则式(4)为
ΔV(t)=ΔW(t)+g(t)Δt
(5)
将式(2)代入式(5),得

(6)
由式(6)可知,通过视加速度可以建立时间增量与速度增量之间的关系。
1.2 导航零点偏差与速度偏差的关系
导航零点偏差通过视加速度传播而导致速度偏差,由此可以建立导航零点偏差与速度偏差之间的关系。这可由式(6)做进一步分析而得到。
记导航零点偏差为Δt0,弹上导航计算与离线导航计算得到的速度分别为Vd和Vy。当导航计算零点与遥测时统零点相同时,这2种方式计算出来的速度是相同的。当存在零点偏差时,可以将导航计算零点作为基准,定义遥测时统零点延迟导致的零点偏差为正。
图1和图2分别给出了遥测时统零点滞后和超前于导航计算零点情况下的速度偏差示意图,其中弹上零点和遥测零点分别记为Od和Oy,且Δti=ti-ti-1。下面分别对这2种情况进行讨论。
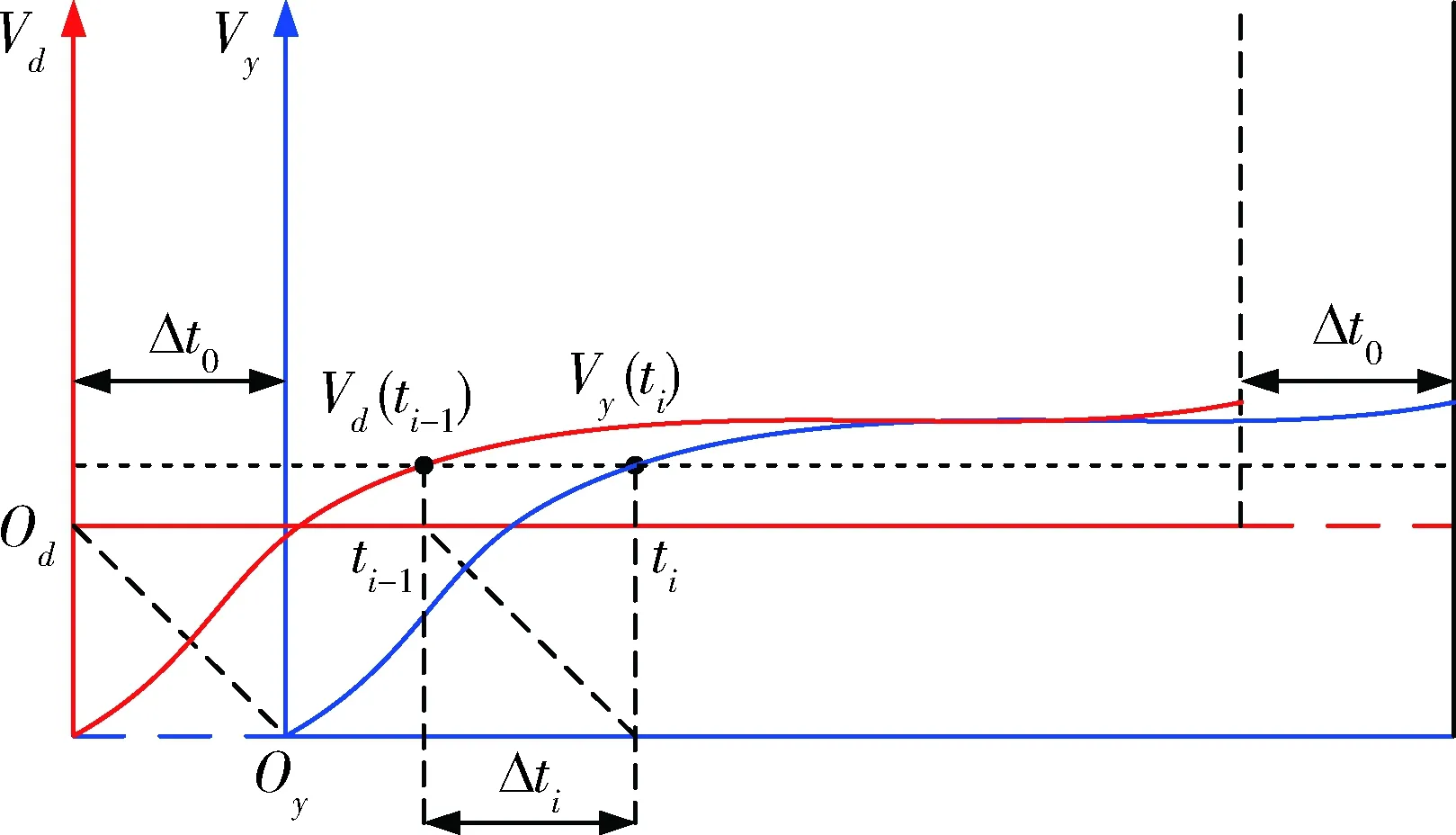
图1 速度偏差(遥测时统零点滞后)

图2 速度偏差(遥测时统零点超前)
1.2.1 遥测时统零点滞后情况
当遥测时统零点滞后时,由图1可知,Vy(ti)=Vd(ti-1),则对于任意时刻ti,有
ΔV0(ti)=Vd(ti)-Vy(ti)
=Vd(ti)-Vd(ti-1)=ΔVd(ti)
(7)
由式(6)和(7),可得
(8)
式(8)表明,零点偏差通过视加速度传播而导致速度偏差,即零点偏差会导致离线计算速度值偏离弹上计算速度值。对于给定的Δt0,速度偏差取决于视加速度和地球引力加速度。由于视加速度和地球引力加速度不断变化,因而零点偏差造成的速度偏差也是随时间不断变化的。

1.2.2 遥测时统零点超前情况
当遥测时统零点超前时,由图2可知,Vd(ti)=Vy(ti-1),则对于任意时刻ti,有
ΔV0(ti) =Vd(ti)-Vy(ti)
=Vy(ti-1)-Vy(ti)=-ΔVy(ti)
(9)
由式(6)和(9),可得
(10)
由式(9)和(10)可见,由于弹上导航计算速度Vd可以直接由遥测处理数据获得,因而只需计算出相应的加速度和速度Vy,便可确定零点差值Δt0。其中,速度Vy可以通过离线导航计算得到,具体过程将在下节给出。
式(8)和(10)表明,不论用弹上计算加速度还是用离线计算加速度估算导航零点偏差,得到的结果都是一样的,且当Δt0>0时,遥测时统零点滞后于弹上计算零点;当Δt0<0时,遥测时统零点超前于弹上计算零点。
式(10)给出了导航零点偏差与速度偏差的精确关系式,在某些条件下可以简化得到一些近似的结果。对于飞行试验而言,视加速度、地球引力加速度在发射惯性系下的3个分量往往处于不同量级。例如,与视加速度的发射惯性系Z向分量相比,X向和Y向分量相对较大;与地球引力加速度的发射惯性系Y向分量相比,X向和Z向分量相对较小。简言之,在发射惯性系的X轴上,视加速度分量要远大于地球引力加速度分量,尤其在运载器的主动段这个趋势特别明显。在这种情况下,式(10)可以简化为
(11)
其中,[t1,t2]是在主动段中选取的一个时间区间。这种选择取决于飞行器类型和飞行性质。
用式(11)估算导航零点偏差是十分有利的,尤其在得不到地球引力加速度精确值的情况下。由于地球为形状复杂的非均质物体,要计算其对地球外一点的引力位,需要对整个地球进行积分[2],因而无论是在设计阶段还是在飞行试验阶段,这种情况都是比较常见的。通常情况下,应用球函数展开式导出地球引力位的标准表达式,然后将地球假定为某种参考椭球体,进而计算引力位梯度,从而得到地球引力加速度。
1.3 导航计算过程
离线导航计算流程如图3所示。首先,需要对遥测接收到的惯导系统脉冲数进行修正,包括野值、脉冲数溢出等。然后,将脉冲数和加表当量联合计算视速度及其导数,包括视加速度和视加加速度。它们作为工具误差模型的输入,与误差标定系数一起计算视速度的补偿量。最后,根据导航方程计算导航参数,即速度和位置。
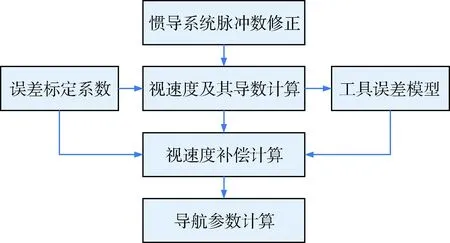
图3 离线导航计算流程
1.3.1 工具误差补偿计算
惯导系统脉冲数的修正见文献[3-4],在此不再详述。计算视速度,只需将弹上装订的加表当量进行单位转换后乘以脉冲数增量即可。计算视速度导数,可以采用微分平滑等方法;如果采样间隔足够小,也可以通过导数的近似公式直接计算。
对于平台式惯导系统,其工具误差模型通常包括3个部分,即加表误差模型、陀螺误差模型和平台静差模型[5-6]。
加表误差模型为:
(12)
其中,ka0x,ka0y,ka0z为加表零次项误差系数,ka1x,ka1y,ka1z为加表一次项误差系数,θxz,θxy,θyz,θyx,θzy,θzx为加表安装误差系数。
陀螺误差模型为:
(13)
平台静差模型为:
(14)
由上述工具误差模型即可计算出视速度的补偿量。其中,加表误差导致的视速度偏差可以直接由式(12)计算,而陀螺漂移将导致平台角偏差进而造成视速度偏差,它同平台静差一样可以通过积分计算出视速度的补偿量。
需要指出的是,如果平台是在弹射点火之前断调平的,需要将断调平时刻到弹射点火时刻这段时间的陀螺漂移折算成平台初始偏差角,然后再进行导航计算。对于断调平时刻早于遥测存储器记录开始时刻的情况,由于平台脉冲数不全,在计算陀螺漂移量时,需要对视速度进行补充计算。视速度的补充计算主要依据斜置惯性平台敏感发射点重力加速度的物理特性,详细推导过程见文献[7]。
1.3.2 导航方程计算
导航计算通常在惯性系或发射系下进行。发射惯性系的导航方程[8]如下:
rI=R0+PI
(15)

在弹射点火时刻,导弹的初始速度和位置为
(16)
其中,N0,Ha分别为卯酉半径和惯性平台几何中心的大地高,Ω为平行于地球自转轴的地速矢量。
导航方程的解算可以通过数值积分或者解析递推的方法来完成。
2 计算验证
结合试验数据,对上述方法的有效性进行验证。首先,进行视速度的补充计算,并通过平台漂移角的一致性对计算结果进行验证。然后,在不考虑零点偏差影响的情况下,进行导航计算,并将发射惯性系速度偏差与视加速度进行比对。最后,将估算出的零点偏差进行补偿后再进行导航计算,并与弹上导航计算结果进行比对,以检验零点偏差估算方法的正确性。
查询惯性平台断调平时刻、遥测存储器启动记录时刻等数据。补充计算弹射点火前的视速度,并根据平台误差系数和加表脉冲数计算出平台漂移角。经分析,离线计算结果与遥测输出结果一致,其中X轴向和Z轴向误差为10-5度量级,Y轴向误差为10-4度量级,验证了视速度补充计算方法及平台漂移角计算方法的正确性。
弹射点火前的陀螺漂移量可以作为平台初始偏差角计入平台静差模型中;然后,从弹射点火时刻开始将加速度计、陀螺和平台这3者的工具误差进行补偿;接着,将补偿后的视速度和视加速度从平台坐标系转换到发射惯性系;最后,根据导航方程计算出发射惯性系下的速度和位置。需要指出的是,离线导航计算的发射惯性系需要与弹上导航计算一致。将弹上导航计算与离线导航计算得到的速度作差,可以得到速度偏差变化曲线。作为对比,同时给出补偿后的发射惯性系视加速度。经分析,这2条曲线的形状是一致的,说明了上文分析方法的正确性。将这2条曲线的时间点对齐后,由式(11)即可算出各个时间点的零点偏差。考虑到大部分时间段的视加速度值处于零线附近,可以截取位于时间区间[140s,170s]内的曲线进行计算,得到零点偏差计算结果,其均值为0.032s。
为了消除离线导航计算的速度偏差,需要对零点偏差造成的视速度偏差进行补偿。取Δt0=-0.032s,由式(8)或(10)计算视速度的补偿量,并叠加到工具误差的补偿量上,然后再由式(15)进行导航计算,可得零点偏差修正后的发射惯性系速度偏差。零点偏差修正后,速度偏差和零点偏差均接近于0,这表明零点偏差得到了有效修正,离线导航计算结果与弹上导航计算结果趋于一致。
3 结论
通过分析零点偏差与导航速度偏差的关系,给出了一种基于导航方程的零点偏差估算方法。以某平台式惯导系统为例,分别进行了视速度补充计算、工具误差补偿计算和发射惯性系导航计算。基于试验数据的计算结果表明,本文所给方法能够有效估算出导航零点偏差。基于这个估算值对离线导航计算结果进行补偿,其结果与弹上导航计算结果趋于一致,从而验证了弹上导航计算方案的正确性。
[1] 沙钰,吴翊,王正明,等. 弹道导弹精度分析概论[M]. 长沙:国防科技大学出版社,1995.(Sha Yu, Wu Yi, Wang Zhengming, et al. Accuracy Analysis Conspectus of Ballistic Missile [M]. Changsha: Press of National University of Defense Technology, 1995.)
[2] 陈克俊,刘鲁华,孟云鹤. 远程火箭飞行动力学与制导[M]. 北京:国防工业出版社,2014. (Chen Kejun, Liu Luhua, Meng Yunhe. Launch Vehicle Flight Dynamics and Guidance[M]. Beijing: National Defense Industry Press, 2014.)
[3] 范金华,彭杰,郭先锋. 惯组脉冲数全量数据分析及软件实现[J]. 导弹试验技术, 2015, (113): 26-30.(Fan Jinhua, Peng Jie, Guo Xianfeng. Data Analysis and Software Realization of IMU Pulse Number [J]. Missile Test Technology, 2015, (113): 26-30.)
[4] Fan J, Song J, Peng J, Guo X. Data Pre-Processing of Inertial Measurement Unit Based on Abnormity Analysis[C]//Proc. 27th Chin. Control Decis. Conf., 2015, 1812-1816.
[5] 程光显,谢全根. 制导与精度分析[M]//龙乐豪. 总体设计(中). 北京:宇航出版社,2001.(Cheng Guangxian, Xie Quangen. Guidance and Accuracy Analysis [M]// Long Lehao. Overall Design. Beijing: Astronautic Publishing House, 2001.)
[6] 胡云中. 陀螺稳定平台漂移误差参数的辨识方法研究[J]. 航天控制, 2004, 22(2): 10-12,18. (Hu Yunzhong. Identification of Drift Error Parameters for Gyroscope Stable Platform[J]. Aerospace Control, 2004,22(2): 10-12,18.)
[7] 范金华,彭杰,宋建英. 斜置惯性平台漂移角离线复算方法[J]. 导弹与航天运载技术,2016, (345): 24-26,39.(Fan Jinhua, Peng Jie, Song Jianying. Inclined Inertial Platform Drift Angle off-line Recalculation Approach[J]. Missiles and Space Vehicles, 2016, (345): 24-26,39.)
[8] 李连仲,韩金堆. 制导技术基础[M]//陈世年. 控制系统设计. 北京:宇航出版社,1996.(Li Lianzhong, Hang Jindui. Guidance Technology Basis [M]// Chen Shinian. Control System Design. Beijing: Astronautic Publishing House, 1996.)
Calculation Approach of Zero Time Deviation in Offline Navigation Re-Computation
Fan Jinhua, Peng Jie, Song Jianying
Taiyuan Satellite Launch Center, Taiyuan 030027, China
Thezerotimeconsistencyissueofonlineandofflinenavigationcomputationisstudiedtovalidatetheonlinenavigationschemeinvolvedinthemissileflighttest.Anavigationequationbasedontheapproachofcalculationforthezerotimedeviationisproposedbyestablishingtherelationshipbetweenthezerotimedeviationandthevelocitydeviationthroughtheapparentacceleration.Aplatforminertialnavigationsystemistakenforcasestudy,andthespecificprocessofnavigationcomputationisprovided,includingthesupplementcomputationoftheapparentacceleration,compensationcomputationoftheinstrumenterrorsandthenavigationcomputationunderthelaunchinginertialframe.Basedonthemissileflighttestdata,thecalculationresultsindicatethattheproposedmethodiseffectivebyestimatingthezerotimedeviationbetweenonlineandofflinenavigationcomputation,and,thevalidationoftheonlinenavigationschemeisproventhattheofflinenavigationcomputationresultsisapproachingtothesameaftercompensationbycomparingwiththeonlineones.
Zerotimedeviation;Inertialnavigationsystem;Navigationcomputation
*国家安全重大基础研究项目
2015-11-25
范金华(1983-),男,福建福安人,博士,工程师,主要研究方向为试验分析与评估;彭 杰(1963-),男,湖北建始人,硕士,高级工程师,主要研究方向为试验分析与评估;宋建英(1968-),男,山西孝义人,硕士,高级工程师,主要研究方向为试验分析与评估。
V417+.7
A
1006-3242(2017)03-0019-05