基于增量式光栅编码器的高精度角位移测试方法
2017-07-21 05:13刘晴晴韩利军邵春江
航天控制 2017年3期
刘晴晴 韩利军 任 磊 邵春江
北京航天自动控制研究所, 北京100854
基于增量式光栅编码器的高精度角位移测试方法
刘晴晴 韩利军 任 磊 邵春江
北京航天自动控制研究所, 北京100854

针对增量式光栅编码器,给出一种四倍频细分结合A/D转换计算反正切的方法,测量编码器转过的角位移。经验证,该方法能有效提高增量式光栅编码器的分辨率,得到较高的角位移测量精度。 关键词 增量式光栅编码器;四倍频细分;反正切计算;角位移测量
光栅编码器是一种集光、机、电于一体化的数字化检测装置,是通过光电转换将电机转子的角位移量转换成数字量的传感器,具有分辨率高、精度高、可靠性好、测量范围广和使用寿命长等优点,因此,被广泛应用于航空航天、自动流水线和高精度测速系统等诸多领域中[1]。光栅编码器按照其测量原理又分为绝对式光栅编码器和增量式光栅编码器。绝对式光栅编码器通过对应电动机轴角位置的编码值获得绝对位置信息,不需要测定零位,但价格相对其他方式较为昂贵[2]。增量式光栅编码器直接利用光电转换原理输出矩形波脉冲信号,它的优点是结构简单、机械平均寿命长、可靠性高、抗干扰能力强和传输距离远;缺点是只能输出轴转动的相对位置信息[3]。
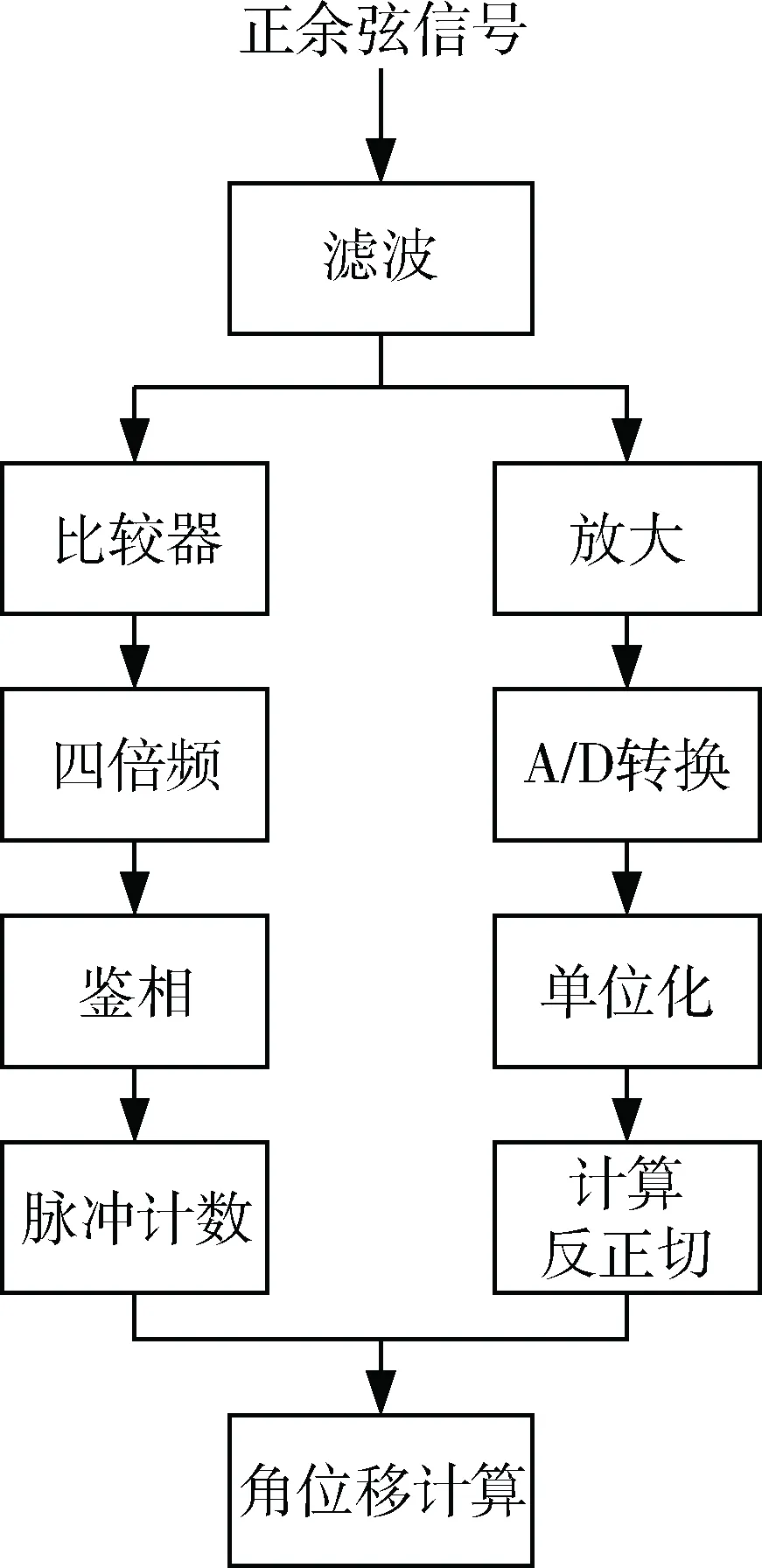
本文基于运动控制系统中常见的增量式光栅编码器,进行高精度的角位移检测方法研究。现在常用的零位检测电路采用单限电压比较器,存在抗干扰能力差的问题。采用滞回电压比较器,提高了编码器零位信号检测电路的抗干扰能力。常用的编码器信号处理采用四倍频方式,只能将编码器分辨率提高4倍;采用四倍频细分结合A/D采样方式,将编码器输出的相位相差90°的正余弦信号进行四倍频细分和鉴相,同时对编码器输出信号进行A/D转换,构造反正切函数,进一步细分计算,大幅度提高了编码器的角位移测量精度。
1 增量式光栅编码器输出信号特点
增量式光栅编码器输出3路信号,分别为相位相差90°的正弦信号、余弦信号和零位信号。增量式光栅编码器每次旋转过0时,其零位输出端输出电压尖峰信号,为零位信号,指示编码器通过零位位置,如图1所示。增量式光栅编码器主轴每旋转一圈,输出固定数量的脉冲,脉冲数由光栅编码器光栅的条数决定。通过对脉冲数计数,就可以得到光栅编码器转过的角度,如图2所示。光栅编码器输出A和B两路相位相差90°的信号。如果A相超前B相,则表示编码器正转;若B相超前A相,则表示编码器反转。
通过对光栅编码器输出信号进行细分处理,就可以得到编码器转过的角位移。
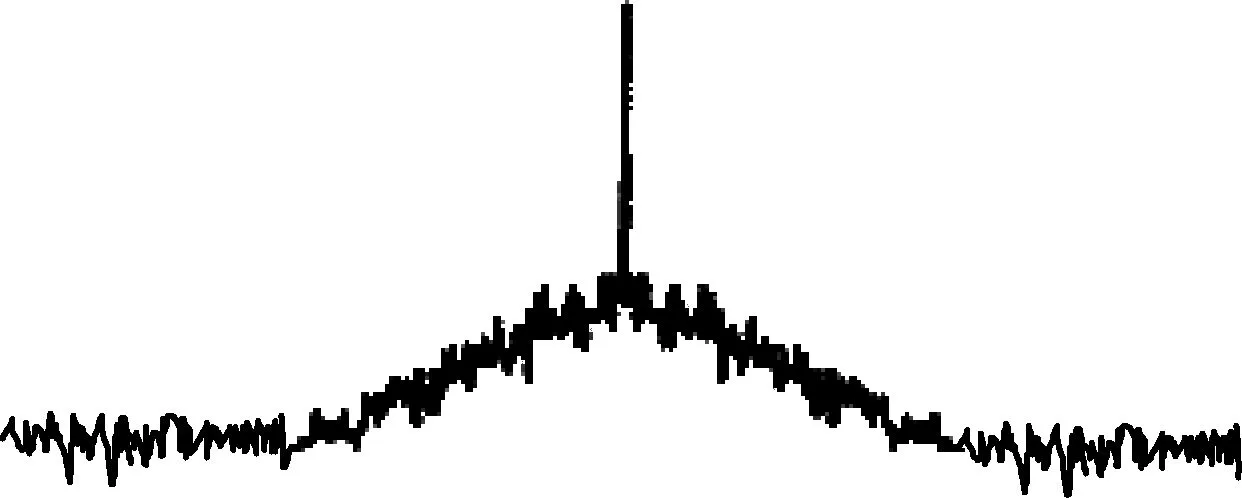
图1 零位信号
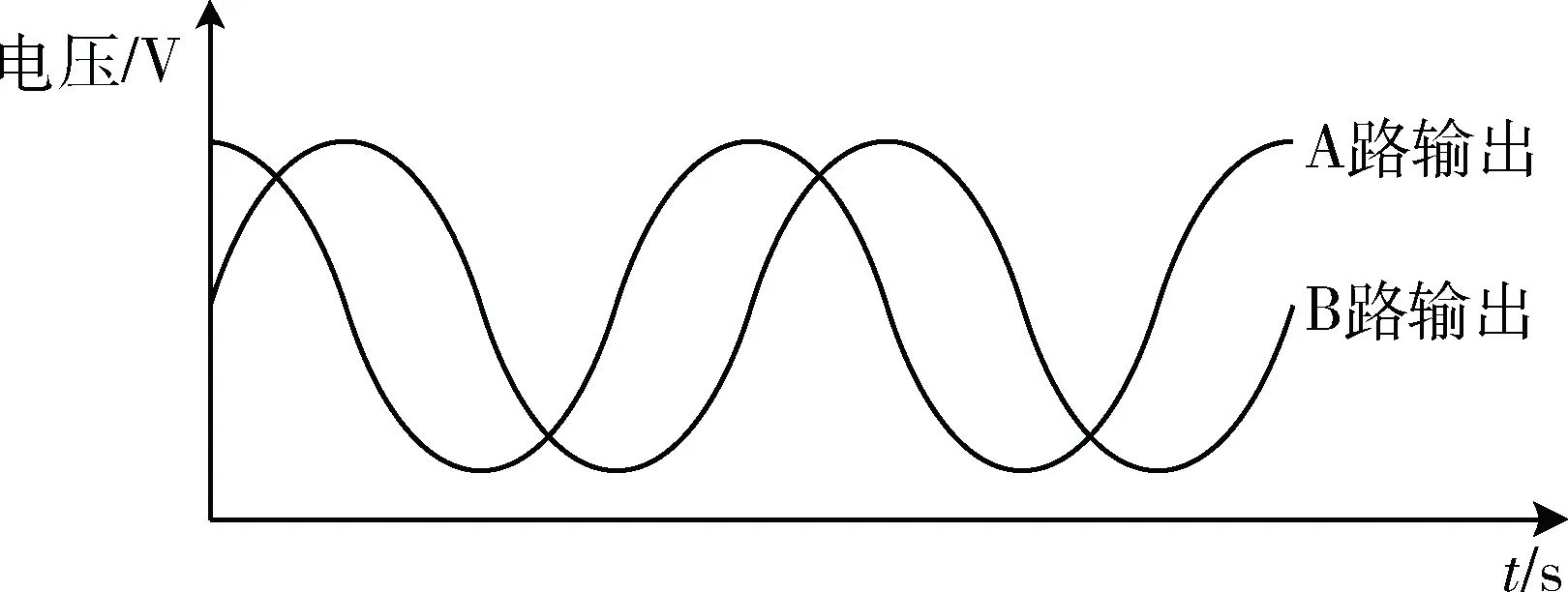
图2 编码器的输出原始波形
2 增量式光栅编码器信号处理方法
2.1 零位信号处理
光栅编码器每次在旋转过0时,零位输出端会输出尖峰电压信号,提取出尖峰电压的位置,就可以得到编码器的零位位置。本文给出一种增量式光栅编码器零位信号处理电路,如图3所示。

图3 零位信号处理电路
由运算放大器U1、电阻R1、电容C1构成低通滤波和电压跟随器电路,可以滤除零位信号上的毛刺。在实际使用中,需要调整RC取值,保证滤波前后信号相位关系不变。
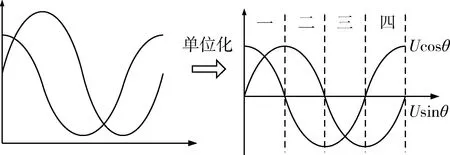
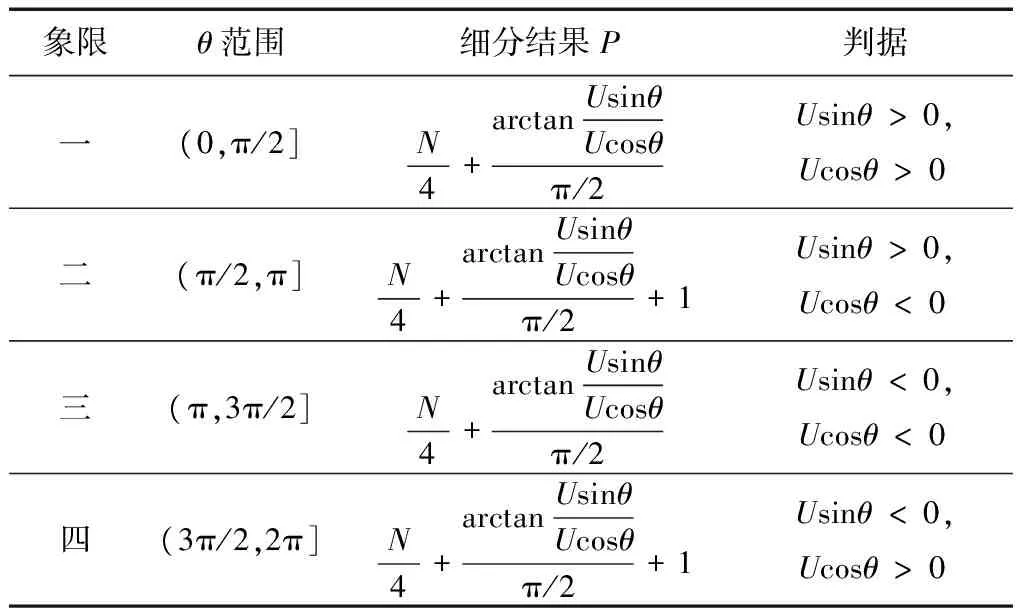
设计电压比较器,将电压比较器的阈值电压与零位尖峰信号进行比较,将零位尖峰电压信号转换为高电平脉冲信号输出。在实际使用过程中,输入电压在阈值电压附近的任何微小变化,都将引起输出电压的跃变,不管这种微小变化是来源于输入信号的噪声还是外部的干扰,因此采用普通的单限电压比较器,抗干扰能力差。本文采用滞回电压比较器,利用滞回电压比较器的滞回特性,可以提高电路的抗干扰能力。如图3中,由电压比较器U2、电阻R2,R3和R4构成滞回电压比较器,滞回电压比较器的输出电压与输入电压关系曲线如图4所示。在输入电压逐渐增大的过程中,当Vi 图4 滞回电压比较器输入输出关系 根据图3,VT1,VT2为: (1) (2) 其中,Vd=+5V。 当光栅编码器每一次经过零位位置时,零位信号处理电路都会给出高电平脉冲信号,使用FPGA电路检测该脉冲信号,将光栅编码器上电后第一次过零时的高电平脉冲信号作为有效信号,检测到该有效信号后,将脉冲计数器的计数值清零。 2.2 正余弦信号细分鉴相 增量式光栅编码器输出相位相差90°的正余弦信号,通过对正余弦信号进行细分,可以获得很高的角位移精度。假设编码器一圈有N条刻线,则编码器旋转一圈,正余弦信号输出端输出N个脉冲,细分主要是对正余弦信号进行处理,获得角位移信息,原理图如图5所示。四倍频鉴相波形如图6所示。 图5 正余弦信号细分工作原理图 2.2.1 四倍频细分和鉴相 对光栅编码器输出的2路相位相差90°的正余弦信号,通过低通滤波和电压跟随器,滤除正余弦信号上的毛刺;构建滞回电压比较器,将正余弦信号转换为方波信号A和B。编码器正转时,A路超前B路;编码器反转时,B路超前A路。通过对A路和B路方波信号的跳变沿进行采样,将一个周期的正余弦信号转换为4个正向或反向脉冲。每产生1个正向脉冲,将脉冲计数值加1;每产生1个反向脉冲,将脉冲计数值减1,从而完成正余弦信号的四倍频细分和鉴相,四倍频细分方法将计数脉冲个数增加了4倍,即将光栅编码器分辨率提高了4倍。设脉冲计数值为N,N即为四倍频细分结果。 图6 四倍频细分波形示意图 2.2.2 A/D采样提高细分精度 如图5所示,光栅编码器输出的这2路正余弦信号经过低通滤波后,同时输出至放大电路和A/D转换器,放大电路使正余弦信号波形能满足A/D转换器输入量程要求。对A/D转换后的数字正余弦信号进行单位化处理后,构造反正切函数,进一步进行细分计算,从而进一步提高编码器角位移测量精度。 单位化处理是将A/D采样的数字正余弦信号转化为幅值相同、直流量为0,且正负对称的标准正余弦信号,如图7所示。单位化处理去掉了正余弦信号幅值的影响,仅保留正余弦信号之间的相位关系,简化了后续反正切计算过程。 图7 单位化及象限判据示意图 假设经过单位化的正弦信号为Usinθ,余弦信号为Ucosθ,根据正余弦信号的符号,可以判断出θ所在的象限,如图7和表1所示。 表1 象限判据表 根据正余弦信号的幅值,计算反正切值: (3) 并根据表1中θ所在的象限,将反正切值在(0,π/2]区间进行归一化: (4) 最终细分结果为: (5) 表2 细分结果 2.3 角位移计算 由上述细分结果,得到增量式光栅编码器相对 其零位转过的角位移: (6) 其中,K为增量式光栅编码器的刻线条数。 采用四倍频细分和A/D转换计算反正切相结合的方式,对增量式光栅编码器的输出进行处理,能有效提高光栅编码器的分辨率,得到较高的角位移测量精度。对于实际中常用的16200条刻线增量式光栅编码器,采用12位A/D转换器,理论上角位移测量精度可以达到0.02″。该技术已应用于实际转位控制系统中,角位移测量精度优于1″。 [1] 林长友. 光栅编码器发展现状分析与展望[J]. 光机电信息,2011,28(6):1-3.( Lin Changyou. Situation Analysis and Prospect of Grating Encoders[J]. OME Information,2011,28(6):1-3.) [2] 黄巍. 基于增量式光电编码器的永磁同步电机转子位置初始定位[J]. 伺服控制,2011,(8):35-37.(Huang Wei. Rotor Incipient Position Location of PMSM Based on Incremental Photoelectric Coded Disk[J]. Servo Control,2011, (8):35-37.) [3] 陶仁浩. 基于增量式光电编码器的高精度位置检测技术研究[D]. 南京:南京航空航天大学, 2012.(Tao Renhao. Research on the High-precision Position Detection Technology Based on Incremental Optical Encoder[D].Nanjing: Nanjing University of Aeronautics and Astronautics,2012.) High-Precision Angular Position Detection Technology Based on Incremental Optical Encoder Liu Qingqing, Han Lijun, Ren Lei, Shao Chunjiang Beijing Aerospace Automatic Control Institute, Beijing 100854, China Amethodisdesignedtocalculatetheangularpositionofincrementalopticalencoder,whichisbasedonfourfold-frequencyandA/Dconversioncalculation.Theresolutionoftheincrementalopticalencodercanbeimprovedbyusingthismethod,andhigherangularpositionmeasurementprecisioncanbeacquired. Incrementalopticalencoder;Fourfold-frequency;Arctangentcalculation;Angularmeasure 2016-06-01 刘晴晴(1983-),女,山东人,硕士,高级工程师,主要研究方向为惯性测量技术;韩利军(1982-),男,河北人,硕士,高级工程师,主要研究方向为导航、制导与控制技术;任 磊(1982-),男,陕西人,硕士,高级工程师,主要研究方向为导航、制导与控制技术;邵春江(1971-),男,北京人,硕士,高级工程师,主要研究方向为导航、制导与控制技术。 TP273 A 1006-3242(2017)03-0058-04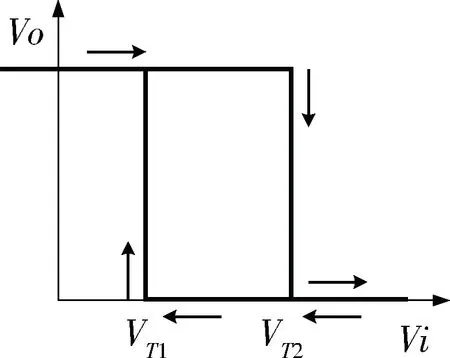



3 结论