
磁悬浮储能飞轮振动状态监测研究
2017-07-24 16:04薛晓川王志强
自动化仪表 2017年7期
薛晓川,王志强
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
磁悬浮储能飞轮振动状态监测研究
薛晓川,王志强
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
针对磁悬浮储能飞轮系统的不平衡振动会影响转子稳定运转和系统正常工作的问题,对其扰动原因进行研究。通过建立含有转子不平衡量的广义干扰方程和磁悬浮飞轮动力学方程,对不平衡振动中的同频、倍频及模态分量进行理论分析。设计并实现了一套基于LabVIEW-DAQ的磁悬浮飞轮振动状态监测系统,完成对储能飞轮振动信号的实时采集、处理和显示,实现了飞轮的振动状态监测,并对一台300 kW储能飞轮进行试验验证。针对储能飞轮工作的强电环境引起的信号噪声,对原始信号进行小波阈值消噪处理。对消噪后的振动信号进行频域分析,获取某一转速下飞轮的振动频谱图和不同转速下飞轮振动信号的三维瀑布图。试验结果表明,该飞轮振动频谱中存在稳定的飞轮旋转频率成分及其倍频分量。该系统操作简单,通用性强,具有一定的市场前景和应用价值。
储能飞轮; 磁悬浮; 不平衡振动; 频率成分; 数据采集; 小波消噪; 频域分析; 状态监测
0 引言
飞轮储能技术作为一种新型储能方式,以其高效、环保等优势,具有广泛的发展前景,并已在电网系统、轨道交通等领域发挥了巨大作用[1]。其原理是通过飞轮升降速,实现电能的存储和释放。相比机械轴承,磁轴承具有无摩擦、体积小、长寿命等特点[2],将磁轴承应用于储能飞轮系统是近几年的研究热点。
磁悬浮储能飞轮工作时常伴有不平衡振动,会影响其工作性能,严重时甚至会引起飞轮失稳。对振动源进行识别和监测,已成为飞轮研究的重要问题。文献[3]、文献[4]中的飞轮振动测试系统,能够实现小型反作用力飞轮的振动监测,但不适用于大型储能飞轮。文献[5]采用广义Lagrange-Maxwell方程,从机电耦合特性的角度,对磁悬浮飞轮系统振动进行了理论分析和仿真验证,但缺乏试验验证。
本文针对磁悬浮飞轮的不平衡振动问题,通过建立广义干扰和转子动力学模型,对振动源中的同频、倍频和模态分量进行理论分析,设计并实现了一套基于LabVIEW-DAQ的飞轮振动监测系统,以识别振动源中的各个分量并进行分析,为飞轮的故障诊断和状态预测提供依据。
1 磁悬浮飞轮振动特性分析
储能飞轮作为复杂的机电耦合系统,其振动原因较为复杂,但具有基本相同的表现形式。根据其频域特征,可主要划分为同频分量、倍频分量和模态分量。现通过建立数学模型的方法,对引起磁悬浮飞轮转子不平衡的各种分量进行分析。
1.1 飞轮振动中的同频分量
磁悬浮飞轮正常工作时,振动成分中存在同频分量,其频率等于飞轮的转动频率,且振动幅值较大。通过建立广义干扰和转子动力学模型的方法,对其影响因素进行分析。转子广义干扰示意图如图1所示。以飞轮质心O为坐标原点建立空间直角坐标系,Z轴为转子转轴,X平面、Y平面过原点且与Z轴互相垂直。X轴、Y轴方向随转子旋转而不断变化。
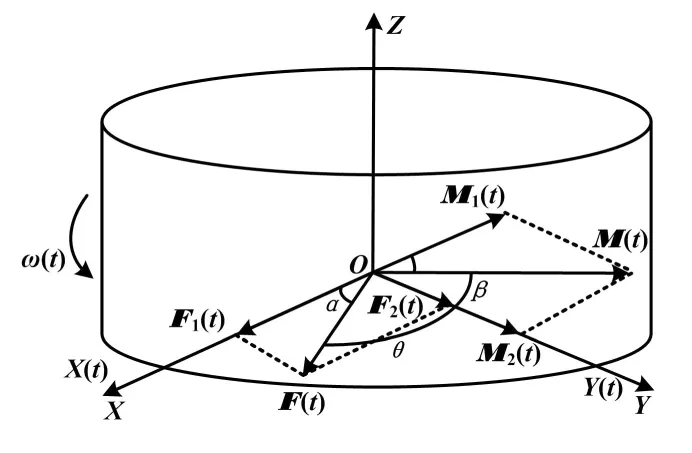
图1 转子广义干扰示意图
转子不平衡量是引起飞轮不平衡振动的重要原因,这源于加工制造工艺的限制,可以通过转子动平衡校正来减小,但无法彻底消除。其表现形式为飞轮工作时旋转主轴和惯性主轴不重合。磁悬浮飞轮的工作原理是将飞轮转子悬浮于转子的几何轴,因此当飞轮绕转子几何轴旋转时,飞轮的惯性主轴就会绕几何轴转动[6],产生惯性力和惯性力偶矩使转子发生不平衡振动。现从广义干扰的角度,对飞轮的不平衡振动原因进行分析。
根据不平衡的定义可知,不平衡量存在时的一种表现形式为力和力矩的广义干扰作用于飞轮[7]。ω(t)为飞轮的转动角频率;F(t)为所有引起飞轮振动的转子惯性离心力的合力,即主矢;M(t)为惯性离心力矩的合力偶矩,即主矩;θ为初始相位差。F(t)和M(t)的方向随转子的转动而改变,其频率均等于飞轮的旋转频率。分别将F、M在X轴、Y轴上进行分解,得:
(1)
(2)
将主矢和主矩的共同作用看作一种广义干扰,在X轴、Y轴上进行分解,分量为Ax(t)和Ay(t)。由于主矢和主矩的频率均等于飞轮转频,故广义干扰分量的频率也与飞轮旋转频率相等。设其幅值分别为Ax0和Ay0,φ为干扰量相对于坐标系的初始相位,则有:
(3)
在不考虑磁轴承控制的前提下,单独分析引入转子不平衡激励带来的影响。此时可将飞轮简化为一个单自由度的线性系统。广义干扰Ax(t)、Ay(t)为系统的激励源,可以看出在X方向和Y方向上,会产生稳定的同频分量,表现为飞轮以等同于转频的频率振动。
此外,转子的不平衡量还会激发磁轴承电流刚度力和位移刚度力中的同频分量。在磁悬浮飞轮系统中,转子的不平衡量会导致磁轴承中心平面对应点的偏移。磁悬浮飞轮动力学简化图如图2所示。
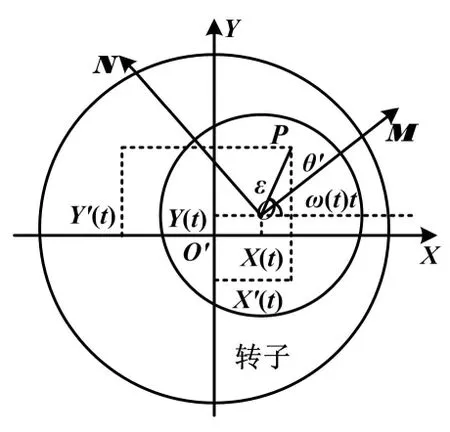
图2 磁悬浮飞轮动力学简化图
图2中:外圆为径向磁轴承,内圆为飞轮转子。
以磁轴承的几何中心O′为坐标原点建立直角坐标系,X轴、Y轴的方向与位移传感器的安装方向一致。由于转子不平衡量的存在,使得其几何轴和惯性主轴不重合。转子以ω(t)的转速作逆时针旋转,O为转子几何中心,P为转子质心,ε为OP向量的模长。以O为坐标原点,建立转子的转动坐标系,对应坐标轴为M和N,且方向随转子转动时刻变化。OP向量与M轴的夹角为θ′。t时刻M轴与X轴夹角为ω(t)t。X(t)和Y(t)为转子的几何中心相对于磁轴承几何中心的位移分量,为磁轴承的控制量。X′(t)和Y′(t)为转子的质心相对于磁轴承几何中心的位移分量。
由图2中的几何关系,得到如下方程组:

(4)
磁悬浮飞轮正常工作时的控制电流一般小于偏置电流,此时可得到磁悬浮飞轮径向转子动力学方程,如式(5)所示。
(5)
式中:Fx、Fy分别为磁轴承在X和Y方向的控制力;μ为真空磁导率;n为线圈匝数;S为磁铁的横截面积;σ为磁铁磁极偏角;iy为偏置电流;ix、iy分别为X和Y方
向的控制电流;X0、Y0分别为转子在平衡位置时X方向和Y方向的位移。
当转子在平衡位置处的位移X=X0、Y=Y0时,可将方程组作线性化处理,分别对电流、位移求偏导,在X、Y趋于0的条件下作一阶Taylor展开,得:
(6)
化简得:
(7)
实际控制时,控制电流为转子位移的PID函数,因此,不平衡引入的扰动会同时引入到位移项和电流项之中,代入式(6)可得:
(8)
由此可知,转子的不平衡量在磁轴承控制的过程中引入同频干扰。
1.2 飞轮振动中的倍频分量
在对飞轮进行磁悬浮时,需根据位移传感器的测量值对磁轴承的轴向和径向位移进行控制。飞轮倍频干扰主要由传感器谐波噪声引起,最终表现为对磁轴承控制电流项的影响。其数学表达式为:
(9)
式中:λx、λy分别为位移传感器引入的噪声干扰;λx,i、λy,i分别为各次谐波对应的干扰幅值;Ψx,i、Ψy,i分别为各次谐波干扰项所对应的初始相位。
将λx、λy代入式(8),可得:
(10)
由此可知,传感器倍频扰动会在磁轴承转子的动力学方程中引入倍频分量。
1.3 飞轮振动中的模态分量
除同频、倍频扰动外,模态分量也是引起飞轮不平衡振动、制约飞轮转速的重要原因。这种由模态分量引起的飞轮扰动被称为结构模态振动,它取决于飞轮系统的固有频率。在飞轮转速范围内,存在转子固有频率和飞轮旋转频率相等的情况,即引发共振[8]。系统中的共振频率由质量、刚度和衰减系数决定[9]。因此,为了避免因不平衡激励引发的共振现象,应使飞轮转频尽量远离飞轮的固有频率。飞轮转子的各阶模态固有频率可由有限元分析软件计算得到。
2 飞轮振动状态监测系统设计
为了获取某一时刻磁悬浮飞轮的振动数据,本文设计了一套飞轮振动状态监测系统,能够实现振动信号的采集、处理、显示和记录。后期可通过对数据进行小波阈值去噪、快速傅里叶变换(fast Fourier transform,FFT)频谱分析、三维瀑布图分析的方法进行验证,以识别飞轮不同状态下的振动对应频率,进而判断飞轮的运行状态。
总体设计思路为:通过固连在飞轮壳体上的多个压电式加速度计,获取飞轮的振动信号。振动信号通过恒流适配器,传送到集成有数据采集卡的工控机中。使用编写的上位机软件对其进行控制,实现数据的采集,处理和记录。系统总体设计框图如图3所示。
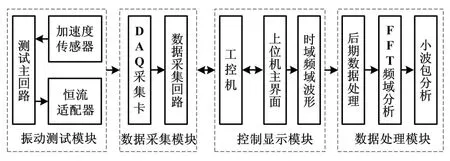
图3 系统总体设计框图
2.1 系统硬件
振动监测系统的硬件部分主要由工控机、NI PCI-6255数据采集卡、CT5200恒流适配器和CT-1050LC加速度计等模块实现。硬件部分设计框图如图4所示。

图4 硬件部分设计框图
数据采集卡选用NI公司的PCI-6255数据采集卡,采用拥有较高的分辨率和敏感度的高度精M系列模块。传感器安装位置如图5所示。

图5 传感器安装位置示意图
测量敏感元件选用CT1050系列压电式加速度传感器。该传感器基于压电效应原理,具有频域宽、灵敏度高、横向灵敏度小等优点。测试系统使用六个压电式加速度传感器与飞轮壳体固连。两组互相正交、水平放置,测量飞轮径向方向振动;两个传感器竖直放置,测量轮体轴向方向振动。
2.2 系统软件
LabVIEW虚拟仪器具有灵活性好、开发费用低、周期短、人机交互性好的特点。本试验系统软件部分采用图形化编程软件LabVIEW平台中的DAQ数据采集功能[10]。其流程是:先设定数据采集的工作状态,如通道数、采样率、数据记录文件路径等;再运行振动信号数据采集程序,并将各个通道振动信号的时域和频域波形图实时显示在主面板上。软件部分设计框图如图6所示。
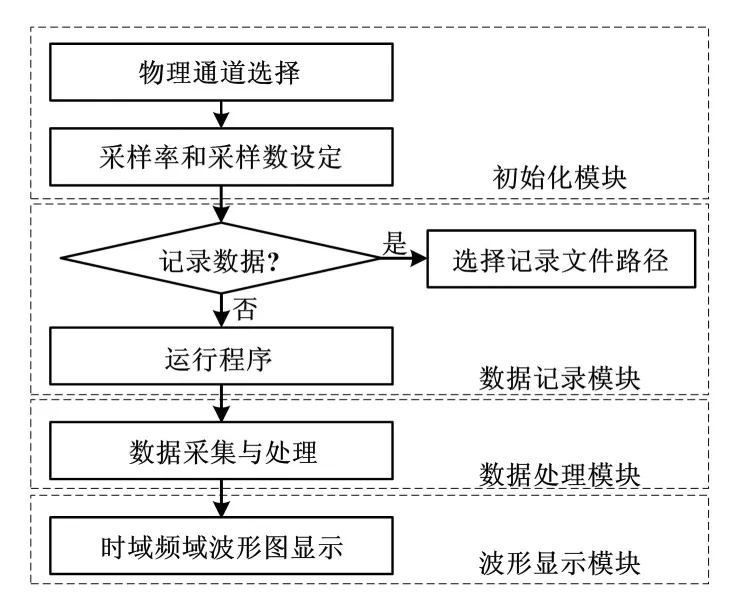
图6 软件部分设计框图
3 试验验证与数据分析
利用试验室研制的一台300 kW磁悬浮储能飞轮进行试验验证。其主要技术指标为:额定功率为300 kW,额定转速为30 000 r/min,整体质量为855 kg,转子直径为314 mm,位移传感器分辨率为2.6×10-3V/μm。
3.1 飞轮模态分析
首先分析振动模态分量的影响。在实际飞轮系统中,当飞轮工作频率与其固有频率相等时,会产生共振现象,使系统无法发挥最大效能。使用ANSYS软件对飞轮转子进行有限元分析,可得到X方向一阶、二阶固有频率为697.6 Hz和1 844.4 Hz,对应振型分别为X方向一阶、二阶弯曲。由于储能飞轮的额定转速为30 000 r/min(转频为500 Hz),低于转子的一阶弯曲模态频率,因此可以将其视为刚性转子,忽略扰动中模态分量的影响。
3.2 小波阈值去噪
对监测系统获取的飞轮振动信号进行数学处理。由于实测信号中不可避免地存在噪声,为了保证试验结果的准确性,可运用小波变换的自适应阈值方法对振动原始信号进行消噪处理,提取信号中的有用成分。具体实现手段是先对原始信号进行小波变换,得到小波变换系数计算阈值;舍去小于阈值的变换系数,对于大于阈值的变换系数,采用软阈值方法进行处理;作小波逆变换实现信号的还原,实现图像去噪的目的[11]。具体实现步骤如下。
①选取DB4和Sym4小波基对原始振动信号进行2层分解。
②计算相应子空间的均值、中值和均方根,确定最优阈值。
③对大于阈值的系数作软阈值处理。
④小波包重构信号恢复。
振动信号时域波形图如图7所示。对比图7(a)和图7(b)可以发现,小波去噪效果明显,验证了该方法的有效性和正确性。
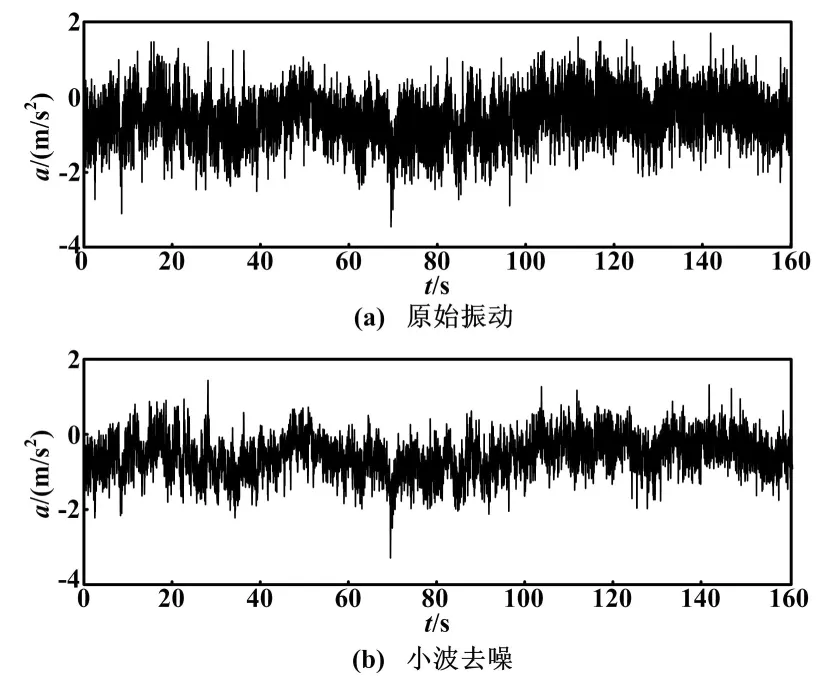
图7 振动信号时域波形图
3.3 FFT频谱分析
频域特性是数字信号的基本特性。从频域角度对信号进行分析与处理,容易对信号的特性进行深入了解[12]。振动信号频谱分析法是在通用信号处理理论基础上发展起来的,它是诊断工作的依据[13]。傅里叶变换是一种积分变换,它建立了信号时域与频域联系的纽带。
借助MATLAB软件对采集到的小波去噪后的信号进行FFT处理,得到振动信号的频域图。通过同一转速下某传感器测量飞轮振动信号频域图,进行频域分析,可以得出各个频率下对应的振动幅值大小,识别对应的特征频率。将对应的飞轮转速、频率、振幅绘制成三维瀑布图,分析飞轮的振动幅值大小及其对应频率随转速的变化规律。在对径向方向传感器测量值进行频谱分析时,尽管X方向和Y方向的受力以及磁轴承的刚度及阻尼略有不同,但振动的本质规律相同。因此取X方向某一传感器的测量结果作FFT并绘制频谱图。飞轮转速为4 500 r/min时的频域波形图如图8所示。
不考虑信号频谱中直流分量的影响,对磁悬浮飞轮的振动频率进行分析。

图8 振动频谱图(4 500 r/min)
由图8可以明显地看出,系统的主振频率为75.1 Hz,基本等于飞轮在4 500 r/min状态时的同频振动频率,误差为0.13%,其振动幅值达到了0.023 07g(g为重力加速度)。其振动源是由转子不平衡量引起的惯性离心力和力矩,以及磁轴承电流刚度力和位移刚度力中的同频分量。这些因素的叠加会引起飞轮系统的同频振动。
同时,从图8还可以看出,系统中存在倍频振动分量,即转频的高次谐波。其振动幅值小于同频分量,以二倍频、三倍频较为明显。该倍频振动分量与磁轴承位移传感器引入的谐波噪声分量有关。信号在50 Hz左右处存在稳定的分量,且幅值较大。该分量由工频电信号干扰造成,实际分析时可略去。如需避免工频干扰,可以采取使用抗电磁干扰的采集卡等措施,改善系统性能。
储能飞轮径向振动信号在某转速范围内的三维转子降速瀑布图如图9所示。
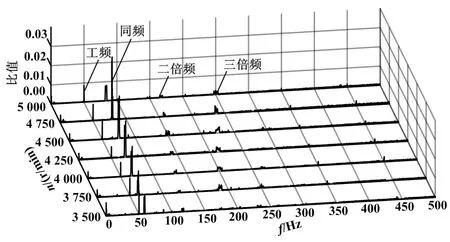
图9 三维转子降速瀑布图
在磁悬浮飞轮自由降速的过程中,忽略直流分量和工频干扰的影响,系统的振动主频是飞轮的工作转速频率,且振动幅值最大。采用提高转子动平衡试验精度等方法减小此同频振动量。除此之外,还可以明显地看出,系统中存在转频的倍频成分,以2次、3次谐波为主。通过降低位移传感器谐波噪声,可减小倍频分量对系统的影响。同时,应保证系统的额定工作转速远离计算得到的转子一阶固有频率,防止共振现象的发生。试验现象与之前的理论分析相吻合,同时也表明飞轮振动状态监测系统能够较好地完成实时采集、处理和监测的预期功能。
4 结束语
本文以磁悬浮飞轮的不平衡振动为研究对象,分析了飞轮振动成分中的同频、倍频和模态分量。在广义干扰方程和转子动力学方程的基础上,阐述了各种振动分量的原因和影响因素。设计并实现了一种飞轮振动状态监测系统,对飞轮的振动数据进行实时的采集、处理和显示。后期对振动数据进行小波阈值消噪和频谱分析。试验结果表明,磁悬浮飞轮正常工作时,存在稳定的同频和倍频振动分量。验证了理论分析的合理性和本系统的可行性,为飞轮故障诊断和状态预测提供依据。
[1] 陈广宇,张华东,于宝鑫,等.飞轮储能关键技术及其应用[J].电气应用,2015,34(24):53-58.
[2] 润章,朱熀秋,朱利东.磁悬浮飞轮轴向混合磁轴承参数设计及分析[J].机械设计与研究,2015,31(1):39-43.
[3] TANIWAKI S,OHKAMI Y.Experimental and numerical analysis of reaction wheel disturbances[J].JSME International Journal,2003,46(2):519-526.
[4] OH H S,CHEON D I.Precision measurements of reaction wheel disturbances with frequency compensation process[J].Journal of Mechanical Science and Technology,2005,19(1):136-143.
[5] 陈峻峰,刘昆,梁文杰,等.磁悬浮飞轮储能系统机电耦合非线性动力学研究[J].动力学与控制学报,2013,11(3):225-234.
[6] 刘彬,房建成,刘刚,等.磁悬浮飞轮不平衡振动控制方法与试验研究[J].机械工程学报,2010,46(12):188-194.
[7] 王全武,虎刚.飞轮振动频谱特征的初步理论分析和验证[J].空间控制技术与应用,2008,34(4):42-46.
[8] 臧孝华,王全武.振动测试技术在飞轮动平衡调整中的应用[J].新技术新工艺,2013(1):51-53.
[9] 王光军,胡万明.高速回转机械振动产生的原因、测试标准与防治[J].氯碱工业,2006(5):44-44.
[10]王平,杨涛,侯守全,等.LabVIEW中DAQ数据采集系统设计[J].自动化仪表,2015,36(7):31-33.
[11]朱希安.小波分析及其在数字图像处理中的应用[M].北京:电子工业出版社,2012:88-95.
[12]刘小群,周云波.基于Matlab的DFT及FFT频谱分析[J].山西电子技术,2010(4):48-49.
[13]梅海青,冯毅.基于振动信号频谱分析的回转机械故障诊断方法[J].流体机械,2003,31(1):29-31.
Study on the Vibration Condition Monitoring
for Magnetic Levitation Energy Storage Flywheel
XUE Xiaochuan,WANG Zhiqiang
(College of Instrument Science and Optoelectronic Engineering,Beihang University,Beijing 100191,China)
In magnetic levitation energy storage flywheel system,the unbalanced vibration may influence the stability of the rotor and the normal operation of system;aiming at these problems,the reasons of the disturbance are studied.Through establishing the generalized disturbance equation containing unbalance quantity of rotor,and the dynamics equation of magnetic levitation flywheel,the theoretical analysis of the same frequency,double frequency and modal components in the unbalance vibration is carried out.A vibration condition monitoring system based on LabVIEW-DAQ for the magnetic levitation flywheel is designed and implemented.With this system,real-time acquisition,processing and display of the flywheel vibration signal can be completed,and the vibration condition monitoring of flywheel is implemented,and the experimental verification for a certain 300 kW energy storage flywheel is conducted.Aiming at the signal noise caused by the strong electric working environment of flywheel,the original signals are processed with wavelet threshold denosing,and the frequency domain syslysis is accomplished for the vibration signal after denoising,to obtain the vibration spectrum of the flywheel at a certain speed; and the three dimensional waterfall diagram of flywheel vibration signal under different speeds.The experimental results show that in the vibration spectrum of the flywheel,both the stable flywheel rotating frequency component and the double frequency component exist.The system is simple and versatile,so it has good market prospect and application value.
Energy storage flywheel; Magnetic levitation; Unbalance vibration; Frequency component; Data acquisition; Wavelet manic elimination; Frequency domain analysis; Condition monitoring
薛晓川(1993—),男,在读硕士研究生,主要从事电机伺服控制技术、集成电路设计、数字信号处理等方向的研究。 E-mail:sleepingriver@163.com。 王志强(通信作者),男,博士,讲师,主要从事先进空间惯性执行机构驱动控制技术、交流永磁电机控制技术、电力电子技术的研究。E-mail:wangzhiqiang@buaa.edu.cn。
TH825;TP806+.1
A
10.16086/j.cnki.issn1000-0380.201707022
修改稿收到日期:2017-01-31
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
电子技术与软件工程(2021年14期)2021-09-23
小学科学(学生版)(2021年4期)2021-07-23
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
时代汽车(2018年12期)2018-06-18
雷达学报(2018年1期)2018-04-04
军事文摘(2017年16期)2018-01-19
中国科技教育(2016年12期)2017-08-11
空间控制技术与应用(2015年4期)2015-06-05
