高精度水下倾角测量系统的设计
2017-07-31 17:13孟令军张慧慧
中国测试 2017年6期
白 杰, 孟令军, 张慧慧
(1.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051;2.中北大学 电子测试技术国家重点实验室,山西 太原 030051)
高精度水下倾角测量系统的设计
白 杰1,2, 孟令军1,2, 张慧慧1,2
(1.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051;2.中北大学 电子测试技术国家重点实验室,山西 太原 030051)
为满足深海资源的探测开发中倾斜角度精确测量的要求,设计一种高精度的倾角测量系统。系统包括以内置高精度温度传感器的加速度计MS9001.D和微处理器STM32为核心的硬件电路,以24bit A/D转换器ADS1251U采样、算法温度补偿和全双工异步通信为核心的下位机软件以及以NI为核心的LabVIEW上位机软件。实现基于MODBUS协议的RS485接口连接上位机,实时显示并将采集到的角度值按照系统时间存储于上位机。编写IIR数字滤波算法,充分抑制振动噪声干扰。实测结果表明:该系统倾角测量精度可达0.01°,输出响应频率为2Hz,具备环境温度补偿功能,满足实际深海作业需求。
深海探测;倾角测量;高精度;补偿算法
0 引 言
深海资源的探测开发与保护具有非常重要的意义,目前深海探测技术[1]成为各国共同关注的一个热点。倾角测量是测量航行姿态的关键环节,其测量精度以及抗振动干扰的能力将直接影响最终的探测器航行路线。国内在高精度水下的倾角领域[2]研究较少,而国外同类产品价格昂贵,又存在技术封锁,基于此本文开展了水下倾角的研发工作。
传统的倾角传感器根据工作原理可分为3类,即固体摆角传感器、液体摆角传感器和气体摆角传感器。而某种程度上,3类传感器均存在一定的缺点。本文采用基于加速度传感器微机电系统(MEMS)技术的电容式加速度计,该传感器的小尺寸、低功耗、高精度为倾角的测量带来了可能。
本文介绍了倾角测量系统的整体方案及具体电路,重点阐述了利用加速度测倾角的方法、信号调理电路的设计、IIR数字滤波器算法的实现、温度补偿算法的实现及上位机应用软件的开发等。
1 总体方案
本系统由内置高精度温度传感器的加速度传感器MS9001.D、信号调理电路、高精度24 bit的A/D采样ADS1251U、微处理器STM32、RS485接口以及上位机等组成。该测量装置为双轴倾角测量仪[3-4],高精度加速度传感器MS9001.D采集到加速度值对应的模拟量与温度对应的模拟量;加速度对应的模拟电压经过滤波放大等信号调理电路[5]后送到ADC转化为加速度数字量,温度对应的模拟量通过STM32的片上资源ADC转化为数字量;然后经过微处理器STM32内部的补偿等一系列算法运算,最终将角度值通过RS485总线接口输出;于上位机端显示同时将采集到的角度值按照当前系统时间以2 Hz的频率存储,便于后期对数据的参考研究。本设计选择了一种内置高精度温度传感器的加速度传感器+高精度24bit的A/D芯片ADS1251U,提高了抗干扰能力和测量精度。通过6阶数字滤波算法,可以精确测量传感器[6]相对于水平面的倾斜角度。方案框架如图1所示。
2 系统硬件设计
2.1 MEMS加速度传感器MS9001.D
传感器采用瑞士Colibrys公司生产的MS9001.D加速度传感器,该传感器是一款低功耗、低噪声、高精度的MEMS加速度计,适用于恶劣环境和耐用度要求极高的应用领域。其内置的高精度温度传感器,可以根据温度的变化修正传感器温度漂移[7]。灵敏度为 2 000 mV/g±16 mV/g,有效测量范围为±90°,温漂<0.05mg/℃,输出为0.5~4.5V模拟量,便于后端信号调理。倾角传感器原理是利用加速度传感器测其重力加速度,根据加速度与重力加速度所满足的关系来计算倾角。基本原理如图2所示。

图2 基本原理图
在重力加速度的作用下,当加速度计的敏感轴与水平方向成θ角时(0≤θ≤90°),敏感轴上的重力加速度分量为gsinθ。传感器模拟输出与倾角θ的对应关系如下:

式中:V——传感器输出的模拟电压,mV;
V0——水平放置时的电压值,mV;
Vg——传感器的灵敏度,mV/g。
即可得到如下关系:

由此可得,敏感轴与水平方向的夹角在一定范围内近似呈线性关系。
2.2 信号调理电路
传感器输出的模拟电压为0.5~4.5V,需要经高精度电阻分压,集成运放LMV324D跟随之后将电压调整到合适范围0.25~2.25V送入A/D转换器ADS1251U。A/D转换器将电子倾角器输出的模拟量转换为数字量,分辨率的高低将影响系统的测量精度[8]。本系统采用TI公司的ADS1251U作为倾角测量的A/D转换器,它是Σ-Δ模数转换器,24位分辨率,宽动态范围,+5V单电源供电。19位有效分辨率(均方根噪声的1.5×10-6)的转换速率高达20kHz。 ADS1251U将转换的数字量通过2线制的I2C总线传送到微处理器STM32。模数转换器的电压分辨率为

图3 传感器及调理电路原理图

计算得到 Q=0.23 μV,而角度在±90°之间变化对应的电压值经调理后变化范围为0~4V,即传感器的分辨率S=0.045°/mV,而最小分辨电压为0.23μV,得到最小分辨角度 QS=1.035×10-5(°)。
当加速度为-g,0,g时,角度值为-90°,0,90°。
3 系统软件设计
软件部分包括下位机与上位机。下位机软件包括A/D采样控制、IIR数字滤波器设计、温度补偿以及异步串行通信等,上位机包括异步串行通信、与数据的实时显示与绘图、数据的存储等。
3.1 主程序软件流程
软件流程如图4所示,系统完成初始化配置后,进入ADC进行温度以及加速度模拟量的采集,之后将采集到的加速度进行滤波降噪处理,将结果滤波之后的加速度值进行温度补偿算法处理,得到当前温度的倾角值,之后经RS485总线传送到上位机进行倾角显示与记录。
3.2 IIR数字滤波器设计及算法实现
由于实际使用过程中存在机械振动干扰,给系统的测量带来影响,而低频10~20Hz的振动干扰比较突出。为了消除测量过程中的振动噪声所带来的影响,本系统添加了6阶巴特沃斯低通滤波算法[9]。采样频率FS=300Hz,截止频率F1=3Hz。巴特沃斯低通滤波具有通频带平坦、阻带衰减迅速等特点。但是相频是非线性的,群延时也不是常数,可能带来相位失真的问题,故借助Matlab对滤波器的相关特性进行了仿真研究。由图5可得该滤波器阻带衰减迅速,2Hz的噪声信号经过一周期几乎衰减到零。当频率高于2 Hz时,噪声经过滤波器已经衰减到很小。由此可见,该滤波器抑制振动噪声效果明显。

图4 主程序流程图
3.3 温度补偿
尽管传感器温漂很小,但为了进一步提高测量精度,所以此处需要考虑;由于温度变化影响的是传感器的灵敏度,所以只需要修正灵敏度[10]就可以换算得到当前精确的灵敏度值。加速度传感器的灵敏度Vg以及零点电压V0随着温度的变化而变化,均为温度 T 的函数,设为 Vg(T),V0(T)。 所以倾角值实际上是关于电压与温度的一个函数关系即:


图5 滤波器仿真图
根据上式,实时修正随温度变化的灵敏度Vg与零点电压V0即可换算得到修正后的角度值。由于温度的变化有一定的迟滞性,所以对温度的采集无需太快,每秒采集一次。这样既满足系统实际要求,又降低系统资源占用。根据传感器参数,在20℃时,传感器输出的电压为1.632V,温度传感器灵敏度为-11.77mV/℃。而资料显示,海水水温一般随深度的增加而降低,在深1000m处,水温大约为4~5℃,随着深度增加,温度会降到0℃左右的低温。由于温度范围较宽,所以精确测量温度对于灵敏度的确定以及最终倾角的测量很有必要。需要通过高低温实验确定温度与灵敏度和零位电压值的关系。为了得到精确的温度-灵敏度关系,需要在一个温度值下采集多组样本,然后求其平均值。图6是经过多次测量得到的最终温度-灵敏度关系图。

图6 温度-灵敏度曲线图
在一个温度下测量多个样本值,然后取其平均值,每隔5℃,测量一次数据,然后经过线性拟合,得到温度-零位电压值曲线如图7所示。


图7 温度-零位电压值曲线图
理论上N的选取越大越精确,但是从实际考虑,N取10就可以很精确地得到其平均值,所以在实际测试中选取N=10。

图8 上位机界面图
3.4 上位机
上位机应用程序在LabVIEW软件[11]进行设计,采用控件[12]将x轴与y轴的倾斜角度以滚屏的形式显示于界面左边,并将实时倾角值以二维坐标轴的形式显示于右边,如图8所示。友好的人机交互界面,为采集和显示以及最终在PC机存储提供了保障。软件可实现串口参数设置、十六进制命令发送、倾角数据曲线绘制、倾角数据动态实时显示、txt格式数据保存等功能。
4 实验及结果
本系统已经研制完毕,结构紧凑,集成度高,采用灌封技术与油封加多级防水处理,以达到水下作业的需求。
图9是上位机界面通过以txt格式以当前时间为文件名所记录的倾角值。输出响应频率为2Hz,精度达到 0.01°。
5 结束语
本系统方案可行,系统集成度高,从采集到处理以及滤波、温度补偿等方面考虑,降低误差,提高了系统精度,最后将得到的倾角值采用MODBUS协议通过RS485实时显示于上位机,并在上位机上进行记录存储,便于后期对数据的研究分析。研制成功后,经长期测试,工作稳定可靠,取得较好的测试结果。可用于工业生产、军事火力控制、航海潜水以及航空航天等宽温度工作范围的高精度测量领域。
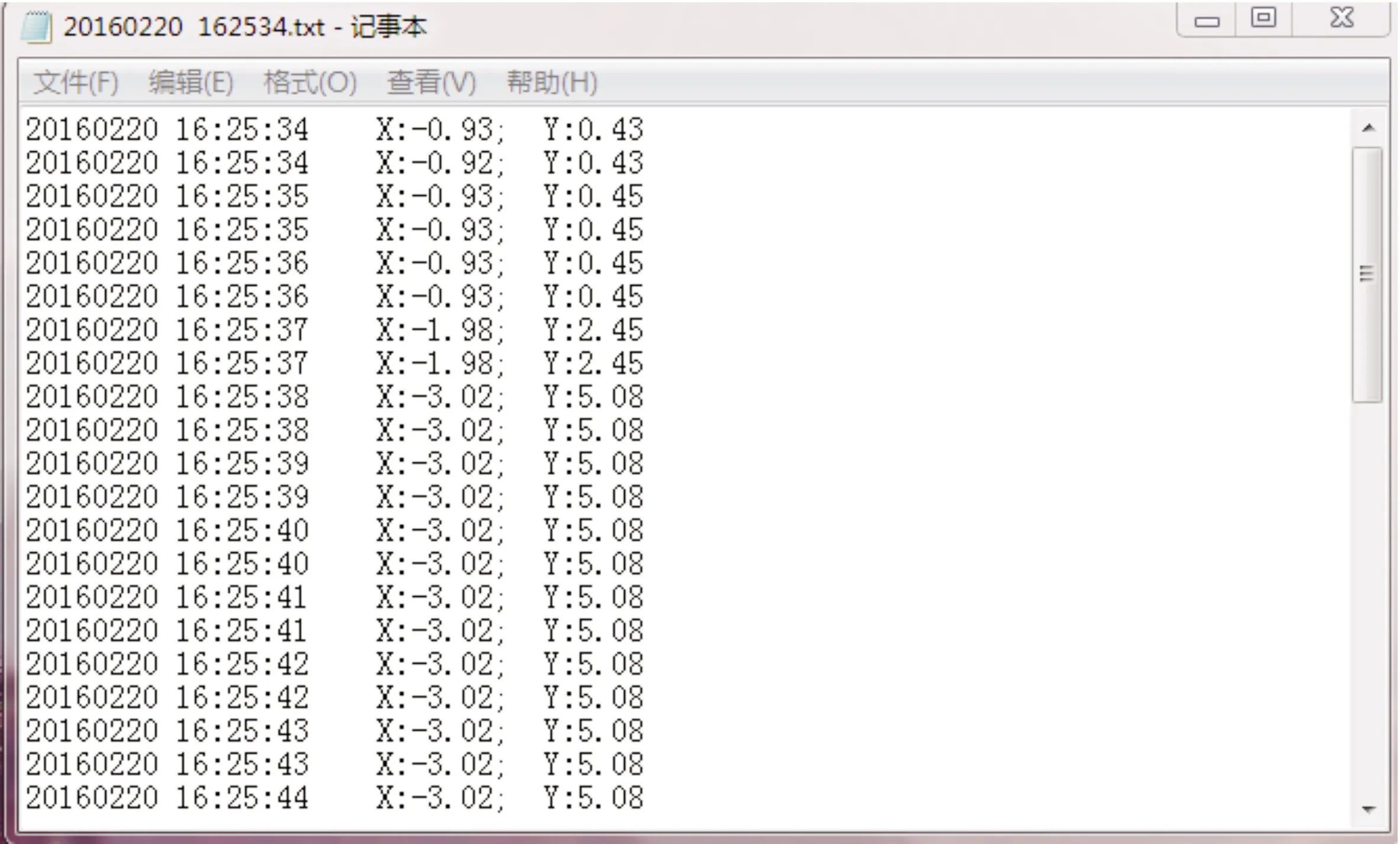
图9 数据记录图
[1]程凯,滕绍伟,杨国仁,等.深海海底原位观测站倾角测量优化设计[J].中国海洋大学学报(自然科学版),2011,41(11):120-123.
[2]李智,汪地,杨浩,等.一种基于三轴加速度传感器的倾角测量装置[J].仪表技术与传感器,2013(8):30-33.
[3] 李士钊.基于AVR单片机的双轴倾角仪的设计与实现[D].长春:吉林大学,2009.
[4]徐晓翔,陈文芗,叶军君.基于三轴加速度传感器的倾角测量系统的设计[J].传感器世界,2012(7):32-36.
[5]柏受军,张荣标,胡海燕,等.差动变压器式大量程精密角位移传感器的设计[J].传感器与微系统,2006,25(11):63-65.
[6] 吴延荣,王克河,王桂娟,等.基于MMA7260Q的数字倾角传感器设计[J].微计算机信息,2010,26(7-1):113-114.
[7] 蒋海涛,郭战营.基于MEMS加速度传感器的飞行器倾角测量系统设计[J].计算机测量与控制,2010,18(1):107-109.
[8] 段晓敏,李杰,刘文怡,等.基于MEMS加速度计的数字倾角测量仪的设计[J].电子设计工程,2009,17(8):71-72.
[9] 耶晓东.基于Matlab的IIR数字滤波器设计及DSP实现[J].电子设计工程,2011,19(9):175-177.
[10]于靖,卜雄洙,叶健.带倾斜修正的电子磁罗盘倾角测量误差补偿算法[J].中国惯性技术学报,2013,21(6):721-725.
[11]李军,王耀弘,张雯,等.虚拟仪器平台婴儿培养箱校准试验装置设计[J].中国测试,2015,41(4):74-76.
[12]余高阳,王见,冯丞科.基于LabVIEW的压力脉动分析仪[J].中国测试,2013,39(5):80-82.
(编辑:商丹丹)
Design of high-precision underwater dip angle measuring system
BAI Jie1,2, MENG Lingjun1,2, ZHANG Huihui1,2
(1.Ministrial Key Laboratory of Instrumentation Science&Dynamic Measurement,North University of China,Taiyuan 030051,China;2.State Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,China)
In order to meet the requirements of precision measurement on angle of inclination in deep-sea resources exploration and development,a high-precision dip angle measuring system is designed.Thesystem ismadeup ofaccelerometerMS9001.D with built-in high-precision temperature sensor and microprocessor STM32 as the core hardware circuit,the slave computer software of 24bit A/D convertor ADS1251U sampling,temperature compensation algorithm as well as full duplex asynchronous communication and the NI-cored LabVIEW upper computer software.It realizes the connection to the upper computer through RS485 interface based on MODBUS protocol to real-time display the angle values and store the acquired angle value in the upper computer by system time.The formation of IIR digital filtering algorithm is able to sufficiently suppress the vibration noise interference.The results show that the measuring accuracy of dip angle can reach 0.01° with outputresponse frequency of2 Hz, having the temperature compensating ability and meeting the demands for deep-sea operation.
deep-sea exploration; dip angle measurement; high-precision; compensation algorithm
A
1674-5124(2017)06-0070-05
10.11857/j.issn.1674-5124.2017.06.015
2016-06-15;
2016-09-21
国家自然科学基金(61274103)
白 杰(1990-),男,山西吕梁市人,硕士研究生,专业方向为电路与系统。
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
当代水产(2018年8期)2018-11-02
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
车迷(2018年12期)2018-07-26
北京航空航天大学学报(2017年9期)2017-12-18
山东工业技术(2016年15期)2016-12-01