
举升台液压设计及仿真研究
2017-08-08 01:20李亨涛
无线互联科技 2017年14期
李亨涛
(宝鸡文理学院,陕西 宝鸡 721000)
举升台液压设计及仿真研究
李亨涛
(宝鸡文理学院,陕西 宝鸡 721000)
文章针对举升台在作业时液压缸同步问题,分析了几种常用液压同步系统,选择比例阀同步的方式对作为液压系统的同步控制,利用AMEsim软件对液压系统进行了仿真,结果显示该液压系统满足工作要求。
举升台;液缸同步;AMEsim
举升台用于垂直高度的物体的升降,采用两个液压缸作为整个工作台的驱动装置。该装置能够根据工作需要进行高度调节。由于液压元器件的本身制造造成的泄露、摩擦力等原因,会使液压缸产生无法同步,造成举升平台的爬行现象,影响作业效果。针对液缸不同步问题,本文分析对比了几种常见的液压同步系统,最后采用比例阀实现两个液压缸的同步。
1 几种常用的同步系统
分流集流阀同步系统是采用分流集流阀进行分流集流的一种控制方式,可控制两个液压缸实现同步,使用简单,但是最大缺点是其同步控制精度不高,油缸的运行速度受到阀门流量的限制,而且容易损坏[1]。
串联液压缸同步系统是采用两个液压缸首尾串联的方式,实现两个液压缸的同步,这种同步方式,需要两个液压缸的作用面积相等,才能保证两个液压缸的同步,但是由于制造的误差,以及内部泄露等原因影响其同步性,需增加补油装置。
比例方向阀同步系统是根据位移传感器的反馈信号,连续地控制阀口开度,当出现位置偏差,比例放大器得到一控制信号,调整比例阀开口,使之朝减小偏差的方向变化,直到偏差消失,因此这是一个位置闭环控制系统。控制精度取决于位移传感器的检测精度及比例阀的响应特性,理论上该回路没有累积误差。
举升平台承受的最大载荷为150 kN,最大行程为125 mm,在起升过程中能够根据需要进行垂直方向的精确移动,对于两个液压缸的同步性要求较高,所以采用比例方向控制阀进行整个液压系统的同步控制。
2 工作原理
液压泵为整个系统提供液压动力油,液压油通过换向阀,分流到两个比例方向控制阀2和4,控制采用“主从方式”,即以位移传感器测得的液压缸1的数据作为数据标准,两个液压缸位移进行比较从而控制器电磁阀的控制口的大小。液压原理如图1所示。
同步系统控制框如图2所示,控制系统主要由3部分组成:负载环节、比例环节、控制环节。u为系统输入,y1,y2为液压缸输出。液压缸的实际位移y1,y2和系统的输入目标位移u进行比较,得到的差值转换为电流信号,通过控制器控制比例阀的阀芯的开度控制进入液压缸的流量,相应的液压缸的活塞杆也会输出成比例的位移输出,只要给定位移信号和实际位移存在差值,偏差信号就会通过控制比例伺服阀换向阀芯动作调整,直到目标位移和输出位移达到平衡,实现两个液压缸同步的目的[2]。

图1 液压原理

图2 同步系统控制框
3 系统仿真分析
3.1 仿真模型建立
AMESim软件是应用较为广泛的液压仿真软件,仿真结果可以为系统设计提供较好的数据支持,随着液压技术的发展,液压仿真软件利用AMESim对液压系统进行建模,对液压缸的运动情况进行仿真,液压系统仿真模型如图3所示[3]。

图3 主从缸位移误差
3.2 参数设置及结果分析
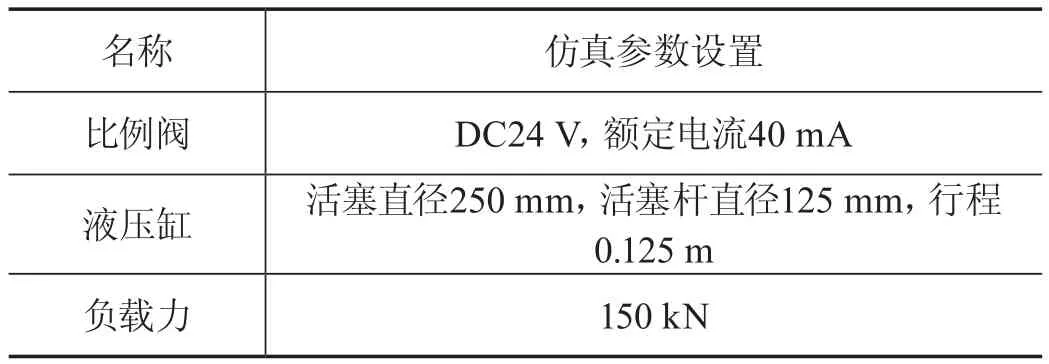
对AMEsim各元器件进行参数设定[4],如表1所示。
续表1
液缸速度曲线如图4所示,从图中可以看出,两个液压缸的速度曲线在起步阶段出现波动,10 s后两个液压缸的运动速度几乎一致,速度稳定没有出现振动,主从缸位移同步效果明显,运动基本趋于重合,满足设备的动作要求。

图4 液缸速度曲线
4 结语
本文通过建立双缸举升平台的液压系统,通过利用简单的PID控制,实现了两个液压缸的同步运动,避免了两个液压缸不同步造成设备出现爬行现象的问题。最后利用AMEsim软件对整个液压系统进行仿真,从仿真结果可以看出该液压系统能够消除液压元件自身制造时带来的不同步问题,实现了较高精度的同步控制。
[1]张利平.液压气动系统设计手册[M].北京:机械工业出版社,1997.
[2]张志伟,张福波,王国栋.一种双液压缸同步控制方法及其仿真研究[J].机床与液压,2003(3):232-239.
[3]孙静,王新民,金国举.基于AMEsim的液压位置控制系统动态特性研究[J].机床与液压,2012(11):120-122.
[4]付永领,齐海涛.LMS Imagine Lab AMEsim系统建模和仿真实例教程[M].北京:北京航空航天大学出版社,2011.
Study on design and simulation of hydraulic lifting platform
Li Hengtao
(Baoji University of Arts and Sciences, Baoji 721000, China)
In this paper, aiming at the problem of hydraulic cylinder synchronization in lifting platform, several common hydraulic synchronous systems are analyzed, and the synchronous control of proportional valve is selected as the synchronous control of hydraulic system. The hydraulic system is simulated by AMEsim software, the results show that the hydraulic system meets the working requirements.
lifting platform; hydraulic cylinder synchronization; AMEsim
李亨涛(1989— ),男,陕西西安,硕士,助教;研究方向:机电控制。
猜你喜欢
流体机械(2020年8期)2020-09-15
石油化工自动化(2018年5期)2018-11-14
制造技术与机床(2017年10期)2017-11-28
石油管材与仪器(2017年4期)2017-09-11
制造技术与机床(2017年2期)2017-05-04
设备管理与维修(2016年5期)2016-03-16
工程建设与设计(2016年4期)2016-02-27
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
郑州大学学报(理学版)(2013年2期)2013-03-11
