汽车ABS控制联合仿真分析*
2017-08-20 01:22吴迪郝亮张芳芳郑利民李浩犹毅
汽车工程师 2017年5期
吴迪 郝亮 张芳芳 郑利民 李浩 犹毅
(辽宁工业大学)

防抱死制动系统(ABS)是现代汽车普遍装备的主动安全装置,ABS在汽车紧急制动时能根据轮胎与路面间的附着力,自动调节车轮制动力大小,防止车轮抱死拖滑,保证汽车侧向稳定性和转向操纵性,同时缩短制动距离,从而取得最佳的制动效果,减少制动时交通事故的发生[1]。但是汽车制动工况非常复杂,难以建立精确的汽车动力学模型。目前,国内外的ABS研究大多集中在MATLAB/Simulink软件建立的1/4汽车仿真单轮模型与BANG-BANG算法、PID及模糊控制等控制算法结合进行的ABS控制效果验证,工况和建模效率不高,导致了ABS模型验证工况不够广泛,整车建模不精确,不能对整车制动过程中的运动特性进行精确描述[2],同时得出的结论有时候和实际有很大的偏差。因此,文章通过在CarSim中建立精确的整车动力学模型与Simunlink中建立的PID控制算法模型进行联合仿真分析,在CarSim中设定不同的仿真工况(低附着系数路面和对接路面),从而对更加广泛路况下的ABS控制效果进行了有效验证,这种CarSim/Simulink的ABS控制器联合仿真分析方法,具有研发效率高、开发精度高及开发成本低等优势,同时也为后续的硬件在环平台的实际验证奠定基础。
1 PID(比例-积分-微分)控制模型的Simulink建立
PID控制是实际应用中最成熟和最广泛的一种控制方式[3]。其最大优点是可以不了解被控对象的数学模型,而是根据经验进行参数调整,并且实施容易,控制效果良好[4]。文章的仿真分析选用的控制器为经典的PID控制器,其仿真模型,如图1所示。

图1 PID控制器模型图
PID控制器以制动时轮胎的期望滑移率为控制目标,通过轮速与车速传感器采集汽车速度和车轮转速信号[5],然后根据实际采集的速度信号计算出汽车各轮胎实际滑移率,再将实际滑移率与期望滑移率进行比较,得出两者的偏差,将其作为PID控制器的输入量,控制器输出其制动力的大小。在控制的过程中要不断地调整PID控制的各参数,从而调节制动力的大小。轮胎受制动器不同制动力作用后,实际滑移率会发生相应的变化,通过反馈后,与期望滑移率的偏差也发生了相应的变化,反复调节控制器的控制参数,最终使实际滑移率始终处于最佳滑移率附近,使汽车在最佳滑移率所对应的地面制动力下进行制动,制动效果达到最佳。
2 联合仿真模型分析
本次仿真车型的选择为B级车,利用CarSim软件建立整车动力学仿真模型,包括车体模型、轮胎模型、转向系模型、悬架模型、制动系模型、传动系及空气动力学模型。特别针对整车制动系模型,要定义与Simulink软件可以进行联合仿真的输入输出接口的设计,其整车动力学模型的输入为4个轮的制动力,输出为4个轮的轮速和车速,为联合仿真奠定基础,搭建CarSim/Simulink联合仿真模型,如图2所示。
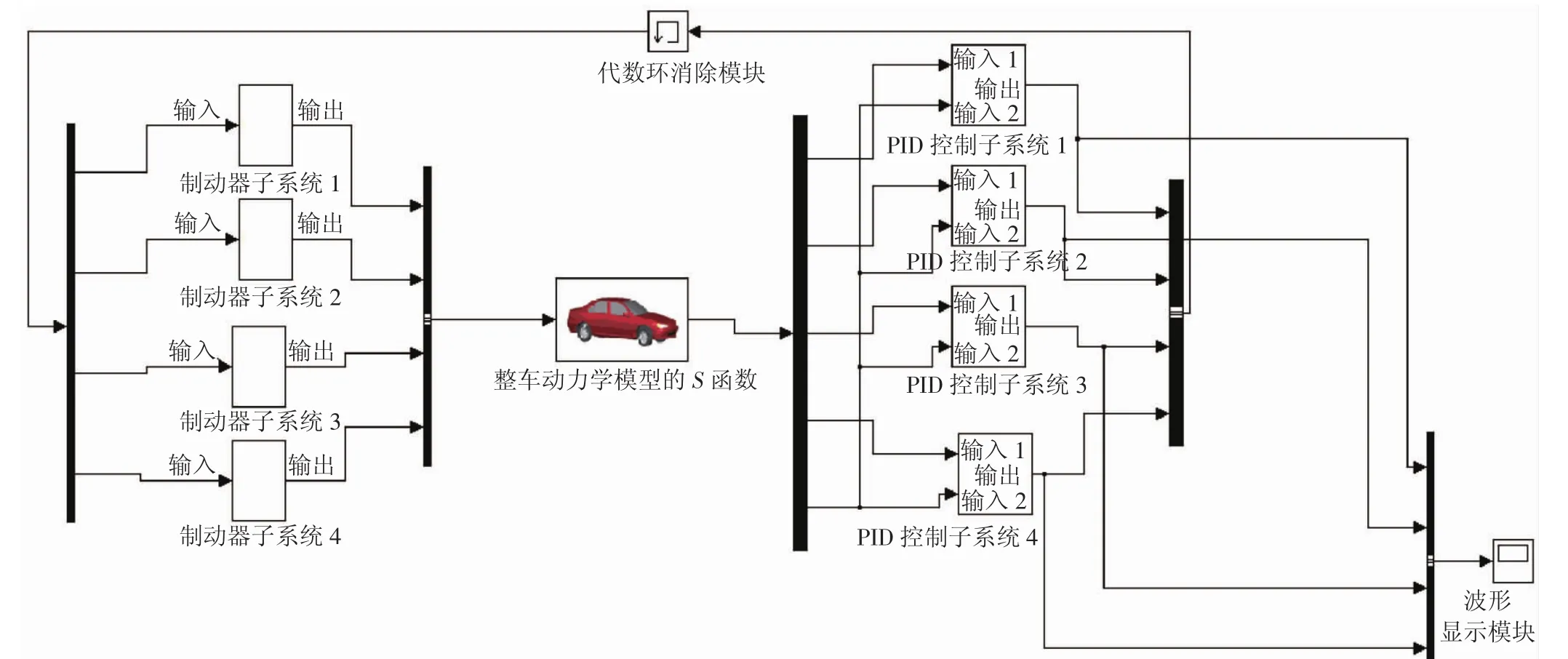
图2 整车动力学CarSim/Simulink联合仿真模型
在CarSim软件中分别选择低附着系数路面和对开路面2种工况。联合仿真模型的顺利运行需要对PID控制器的Kp,Ki,Kd3个参数进行确定,3个参数的确定方法有多种[6]。本次分析采取试凑法,即对参数进行多次设定,得到相应的仿真曲线,通过对不同曲线的对比分析得到3个参数的合理数值。
2.1 低附着系数路面的仿真分析
在低附着系数路面上,进行ABS的PID控制器仿真验证,所得仿真曲线,如图3所示。

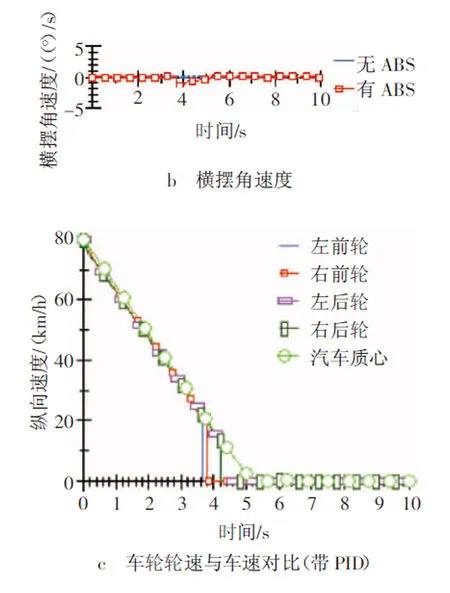
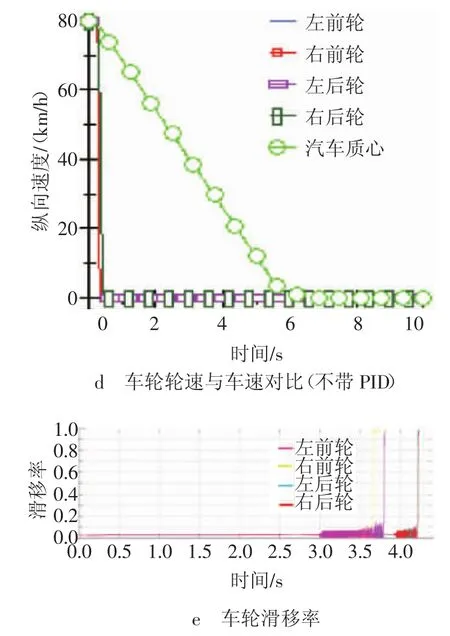
图3 低附着系数路面参数对比曲线
从图3a可以看出,带有ABS的汽车模型制动距离为54 m,制动时间为4.5 s;相反,不带ABS的汽车模型制动距离为70 m,制动时间为5.3 s,从而使得制动距离缩短了16 m,制动时间缩短了0.8 s。从图3b中可以看出,由于低附着系数路面制动时,带有ABS的汽车由于要对制动力进行实时调节,所以横摆角速度在制动过程中4 s处会发生2(°)/s的波动,随着制动时间的增长,最终横摆角速度趋于稳定状态为0,说明制动过程是稳定的,无失稳现象发生。从图3c的曲线可以看出,带有PID控制的ABS制动器的汽车,能够实时地监测滑移率,对制动压力进行实时调整,保证车轮与车速曲线较为接近,使车轮接近于纯滚动状态,不断地将车轮速度减缓到0,其波动比较小,制动过程比较平稳,达到了比较理想的制动效果。从图3d可以看出,不带PID控制器的汽车模型4个车轮轮速快速下降到0,发生了抱死拖滑现象,这是一种极其不稳定的状态。从图3e可以看出,4个轮的滑移率在0~3 s内可以迅速调节到理想的滑移率(0.06)附近并保持稳定,与预先设定的滑移率几乎吻合,而在3 s后,由于整车行驶到低速的时候,车速过小,导致滑移率计算波动较大,从而导致制动力矩和车轮速度都在低速时波动较大,但此时整车基本已趋于稳定,故对制动效果不会产生较大的影响。
2.2 对开路面的仿真分析
在对开路面上进行ABS的PID控制器的仿真验证,所得仿真曲线,如图4所示。
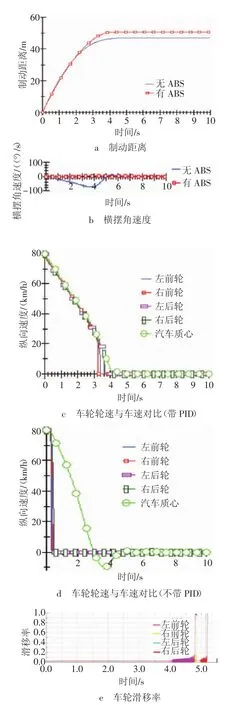
图4 对开路面参数对比曲线
从图4a可以看出,带有ABS的汽车模型制动距离为50 m,制动时间为3.8 s,不带PID控制器的汽车模型制动距离为46 m,制动时间为4 s。采用PID算法设计的ABS控制器进行调节后制动距离有所增加,但不超过10%,满足标准。从图4b可以看出,不带有ABS的汽车模型横摆角速度曲线有较大的波动,说明汽车在制动过程中有很大的摆动,出现了失稳现象;而带ABS的汽车横摆角速度为0,极其稳定,说明制动过程非常平稳。从图4c可以看出,轮速与车速的曲线较为接近,ABS的PID控制器对滑移率进行实时监测,对制动器的制动压力进行实时调整,使车轮处于纯滚动状态,并将车轮的速度缓缓减到0,其波动比较小,制动过程比较平稳,达到了比较理想的制动效果。从图4d可以看出,不带PID控制器的汽车模型4个车轮轮速快速下降到0,发生了抱死拖滑的现象。从图4e可以看出,4个车轮的滑移率在0~4 s内可以迅速调节到理想的滑移率(0.06)附近并保持稳定,与预先设定的滑移率几乎吻合,而在4 s后,由于整车行驶到低速的时候车速过小,导致滑移率计算波动较大,从而导致制动力矩和车轮速度都在低速时波动比较大,但此时整车基本已趋于稳定,故对制动效果不会产生较大的影响。
3 结论
采用联合仿真的方式,通过2种路面制动仿真分析,充分验证了所设计的ABS的PID控制器在低附着系数和对开路面上都能将车轮的滑移率控制在相应的最佳滑移率附近,缩短了制动距离,制动过程平稳,明显地提高了汽车制动效能。通过这种方式可以大大提高实车匹配验证效率,有助于节省开发成本和开发时间,为后续相关仿真分析提供了思路。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
煤气与热力(2021年12期)2022-01-19
数学大王·低年级(2021年2期)2021-02-21
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
汽车观察(2019年2期)2019-03-15
小猕猴智力画刊(2018年7期)2018-08-08