应用于物流AGV磁导航传感器的研究
2017-08-28 14:59戴更新青岛大学商学院山东青岛266071
物流科技 2017年8期
谭 雪,戴更新 (青岛大学 商学院,山东 青岛 266071)
·物流技术·
应用于物流AGV磁导航传感器的研究
谭 雪,戴更新 (青岛大学 商学院,山东 青岛 266071)
磁导航AGV小车在自动化仓储物流配送系统中应用广泛,使用的磁导航方式在导引方式中使用较多。该导航方式在路面上预先规划路径并铺设磁条,通过磁感应信号实现导航,成本较低,可靠性强。文章对传统磁导航传感器进行了进一步的研究,通过使用卡尔曼滤波算法对检测到的数据进行处理,使得磁条位置检测更加准确,行进路线可靠性提高,路径设计及更改更加灵活,为仓储物流中货物的生产和搬运提供了进一步的保障。
AGV;磁导航传感器;卡尔曼滤波;物流仓储
0 引 言
现代物流仓储配送中,由于货物订单批次多、订单批量少、订单周期短,人工仓储物流模式难以为继,基于AGV的自动化仓储物流配货技术便得到越来越多企业的青睐。
Automated Guided Vehicle(简称AGV),即自动引导运输车或者无人搬运车,在自动化仓储物流中充分显示出了其优越性——能够方便的对接、沿一定路径自动运送货物、实现货物的自动上下架。导引技术是AGV的关键技术,决定了其智能性和运动精确度。传统的磁导航传感器采用阈值比较输出,由于各个模拟霍尔传感器的一致性差,且输出存在温漂,所以这种方式对传感器要求较高,本文旨在改善这一问题。
针对现在应用较多的磁导引方式,本文对传统的磁导航传感器进行了进一步的研究,通过对模拟霍尔传感器检测到的数据采用卡尔曼滤波算法,得到了较实际数据更精确的检测数据,使得检测到的磁条位置更加准确,行动路径可靠性提高,且具有识别单双根N、S极磁条的能力,对于物流AGV系统的研究具有深远的意义。
1 导引方式
常见的AGV导引方式有电磁导引、磁条导引、视觉导引、激光导引、惯性导引等。其中磁条导引方式是较常见的导引方式,目前仍被很多系统采用。这种方式预先规划了AGV的行走路径,在行走路径上铺设磁条,通过磁条感应信号进行导航。它的优点是磁带铺设简单,导引原理可靠,磁条成本也较小。
图1为AGV底部结构图。AGV的动力由两个主动轮提供,后部有两个从动万向轮,可通过主动轮差速的方法实现转向。磁导航传感器安装在车体前部,不断地检测磁条位置,AGV主控制器通过磁导航传感器输出信号来校正行走路径。
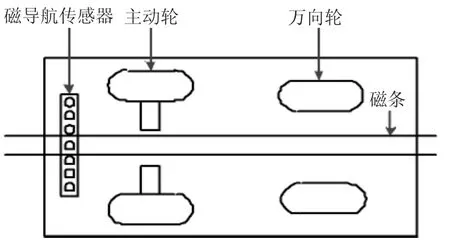
图1 AGV底部结构图
2 系统结构与数据处理
2.1 系统总体结构
磁导航传感器使用模拟霍尔传感器作为磁场检测元件,模拟霍尔传感器根据检测到的磁场的强弱输出不同的电压值。图2为模拟霍尔传感器的输出电压随磁场的方向和强弱变化的曲线,电压随磁场线性变化,在没有磁场的情况下输出电压为1V。
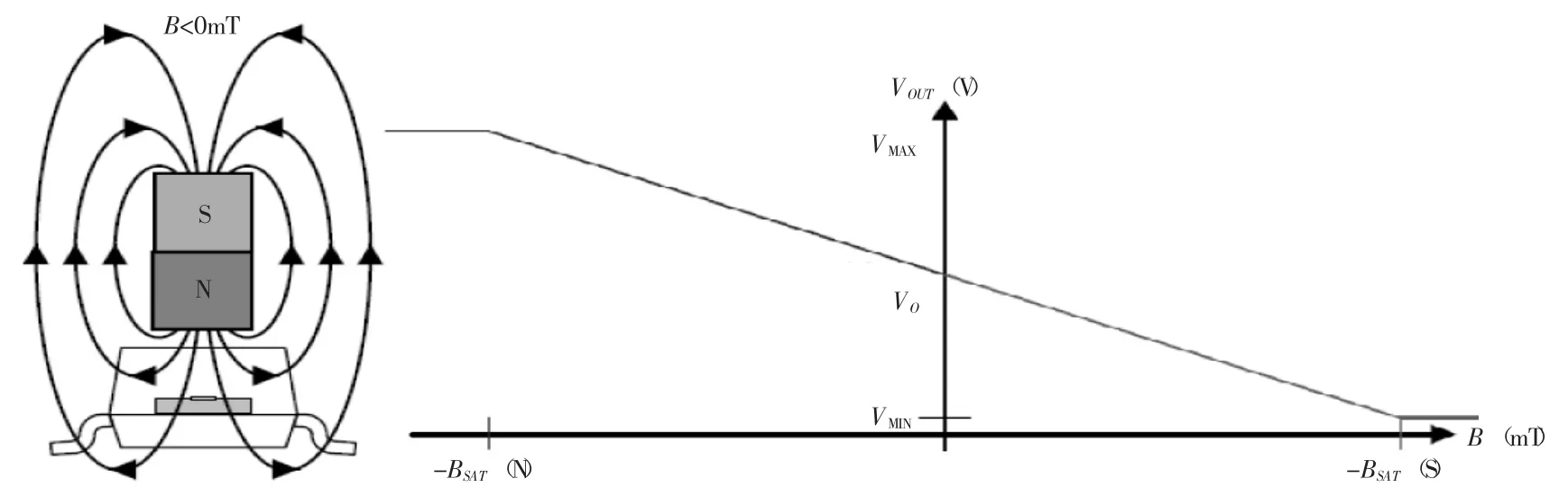
图2 模拟霍尔传感器输出电压曲线
图3为磁导航传感器总体结构图。模拟霍尔传感器输出的电压信号先经过低通滤波器进行滤波,滤除掉附加在电压信号中的高频噪声,再经电压跟随器进行阻抗变换,最后接到数字信号处理器TMS320F28377S的模数转换器(ADC)中,从而测出磁场的强弱。
2.2 数据处理
模拟霍尔传感器在没有磁场的情况下输出电压为1V,微控制器的ADC分辨率为12位,电压基准VREF+为3V,ADC转换公式为:

式(1) 中VREF-为0,根据式(1) 可以计算出在没有磁场时,ADC理论输出应为1 365,但是由于电压噪声以及电压基准VREF+波动等原因,实际情况却有较大偏差。图4为实际情况下ADC数据输出结果,图中标出了50组数据。可以看出输出结果有较大波动且与计算值相差较大,但总体在实际平均值附近波动。
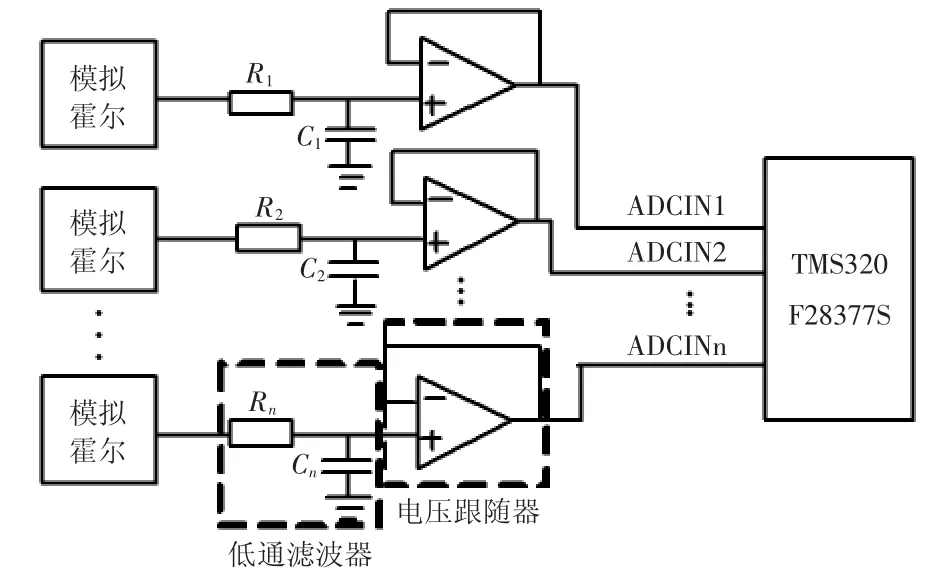
图3 磁导航传感器总体结构图

图4 实际ADC输出数据结果
如图4所示,这种在没有干扰时波动很大的数据是无法直接使用的,必须先经过数据处理。对于这种混叠噪声并且需要快速响应的数据处理情况,常使用卡尔曼滤波算法。卡尔曼滤波算法是去除噪声还原真实数据的一种数据处理技术,是目前应用最为广泛的滤波方法。其原理是通过递推反馈算法,利用线性系统状态方程,对系统状态进行最优估计。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
对实际情况下的ADC输出数据进行卡尔曼滤波,由磁场变化范围设定迭代初始值为1 000,图5为卡尔曼滤波后的数据结果。从图5中可以看出,使用了滤波算法的结果数据波动较小,并且在迭代了10次左右时输出结果已经收敛,算法滤波效果和收敛速度都较好。图6为滤波数据曲线和实际数据曲线的比较。
3 输出数据识别
经滤波之后的ADC数据波动较小,可以作为检测磁条位置的依据。当磁条N极正对模拟霍尔传感器时,传感器输出值大于1V,且越靠近磁条中心的传感器输出电压越高,多个传感器输出会出现一个波峰状。与此相反的是,当磁条S极正对模拟霍尔传感器时,传感器输出值小于1V,且越靠近磁条中心的传感器输出电压越低,多个传感器输出会出现一个波谷状。对磁条位置的识别则等效为识别出波峰或者波谷。当识别到波峰或者波谷时,即表示检测到磁条,然后再检测出波峰中的最大值点或者波谷中的最小值点,即可得到磁条的准确位置。

图5 卡尔曼滤波算法迭代结果
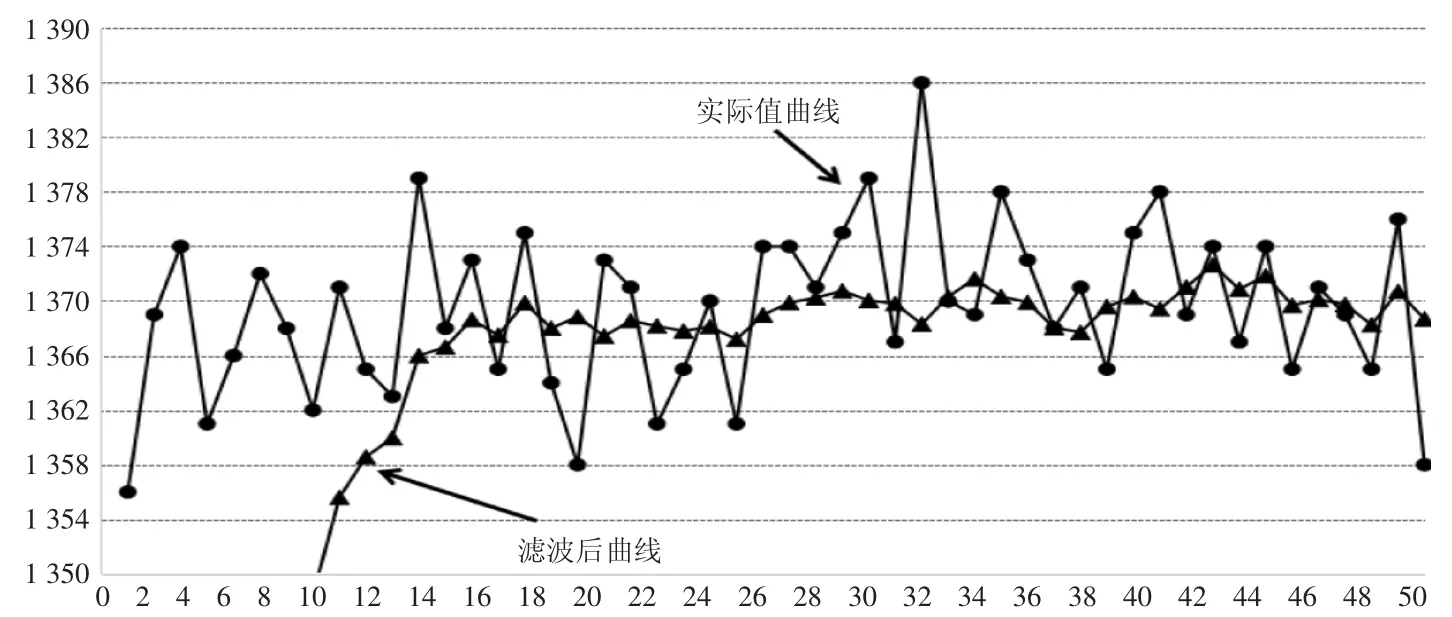
图6 滤波数据曲线与实际数据曲线
为了保证系统的稳定性和抗干扰能力,对传感器输出波峰和波谷的检测是通过实时平均值作为阈值的方法实现的。首先取多个传感器输出值的平均值作为阈值,由于磁条位置的变化,这个平均值也在一定范围内滑动。当连续多个值超过或者低于这个滑动平均值时,即可识别出波峰或波谷,且具有一定的抗干扰能力。
4 实验
为了验证磁导航传感器硬件和算法的可靠性,制作了一个磁导航传感器的样机。模块样机有16路模拟霍尔传感器,传感器间隔0.5厘米放置,保证了检测的范围和灵敏度。
图7为放置单根N极磁条时磁导航传感器的16路模拟霍尔输出信号。可以看出有一个明显的波峰,并且可以用滑动均值识别出来。
图8为放置单根S极磁条时磁导航传感器的16路模拟霍尔输出信号。可以看出有一个明显的波谷,并且可以用滑动均值识别出来。
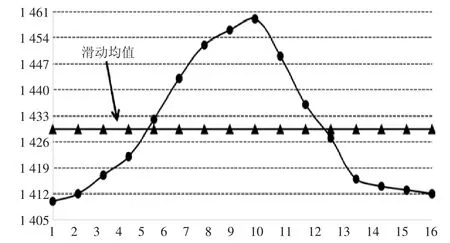
图7 滤波数据曲线与实际数据曲线

图8 滤波数据曲线与实际数据曲线
图9为放置两根N极磁条时磁导航传感器的16路模拟霍尔输出信号。可以看出有两个明显的波峰,并且可以用滑动均值识别出来。
图10为放置两根S极磁条时磁导航传感器的16路模拟霍尔输出信号。可以看出有两个明显的波峰,并且可以用滑动均值识别出来。
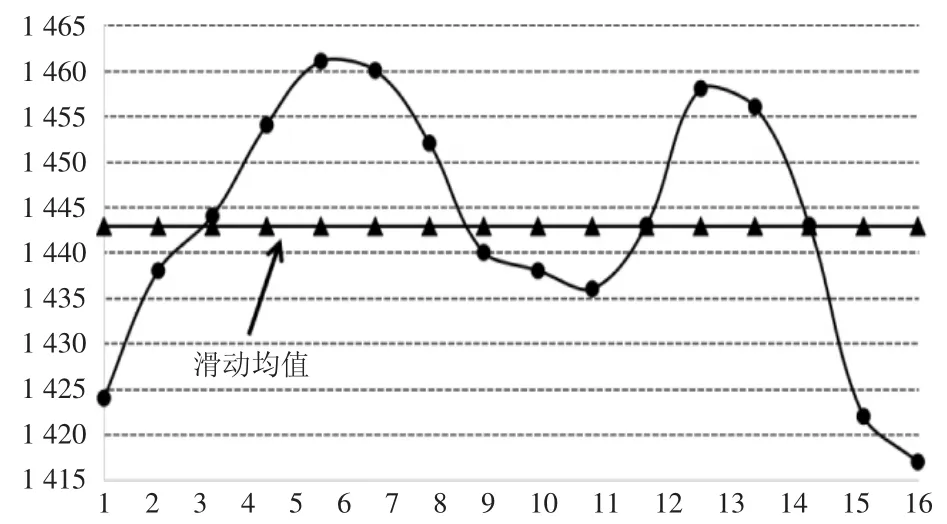
图9 滤波数据曲线与实际数据曲线
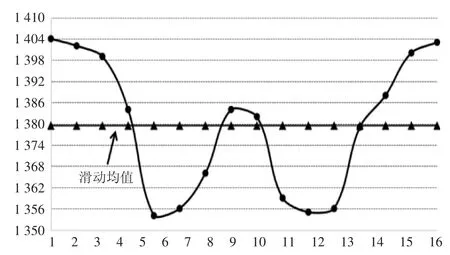
图10 滤波数据曲线与实际数据曲线
5 结束语
通过采用卡尔曼滤波算法对数据进行处理,在存在外界干扰及不确定性的情况下,使磁导航传感器依然能准确检测到磁条的位置,使AGV行动路径更加稳定,路径设置的灵活性增加,效率提高,并进一步降低了成本,使得AGV这一物流链的重要组成部分更加智能和自动化。
[1] 汪寿阳,赵秋红,夏国平.集成物流管理系统中定位——运输路线安排问题的研究[J].管理科学学报,2000,3(2):69-75.
[2] Fu—Ren Lin,Michel J Shaw.Reengineering the Order Fulfillment Process in Supply Chain Networks[J].The Internationa Journal of Flexible Manufacturing Systems,2008(10):191-205.
[3] Terry Austin.The Personal Computer Supply Chain:Unlocking Hidden Value[J].Strategic Supply Chain Alignment,2009(12): 116-120.
Research on Magnetic Navigation Sensor Applied in Logistics AGV
TAN Xue,DAI Gengxin (School of Business,Qingdao University,Qingdao 266071,China)
The magnetic navigation AGV car is widely used in automated warehouse logistics distribution system,and the magnetic navigation is used more in the navigation mode.The navigation mode is used to plan the path on the road surface,and the magnetic strip is paved,the navigation is realized by the magnetic induction signal,the cost is low,and the reliability is strong.This paper gives a further study on the traditional magnetic navigation sensor was processed by using Calman filtering algorithm to detect the data,so that the position of the magnetic strip detection is more accurate and improve the action route reliability,path design and change more flexible and provide further support for the production and handling of goods in storage and logistics of logistics industry.
AGV;magnetic navigation sensor;Calman filter;logistics storage
F253.9
A
1002-3100(2017)08-0037-04
2017-05-29
山东省自然科学基金项目,项目编号:ZR2015GM001。
谭 雪(1993-),女,山东烟台人,青岛大学商学院硕士研究生,研究方向:物流与供应链管理。
猜你喜欢
水利规划与设计(2020年1期)2020-05-25
童话王国·文学大师班(2017年6期)2017-07-10
中国医药指南(2016年1期)2016-07-11
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
爆笑show(2015年8期)2015-09-22
太空探索(2015年6期)2015-07-12
世界科学(2013年6期)2013-03-11
物理与工程(2010年3期)2010-03-25
物理与工程(2010年2期)2010-03-25