
海底观测网的OUC-Raman节点现场机控制系统
2017-09-03 10:30刘晓瑞亓夫军叶旺全宋智愚郑荣儿
哈尔滨工程大学学报 2017年8期
刘晓瑞,亓夫军,叶旺全,宋智愚,郑荣儿
(中国海洋大学 光学光电子实验室,山东 青岛 266100)
海底观测网的OUC-Raman节点现场机控制系统
刘晓瑞,亓夫军,叶旺全,宋智愚,郑荣儿
(中国海洋大学 光学光电子实验室,山东 青岛 266100)
为满足海底观测网络对仪器节点的技术要求,本文设计实现了一套面向OUC-Raman仪器节点水下现场机的控制系统。该系统由电源管理模块和控制器模块组成,利用观测网提供的电力和通信链路控制现场机内部的光谱探测系统和其他外部设备,以实现对海底化学环境的长期观测。电源管理模块能够确保现场机的电气特性满足观测网的要求,控制器模块实现对现场机光谱探测系统和外部设备的有效控制。该控制系统配置了以PC104工控机和MSP430微控制器为核心的控制体系,允许岸基终端在线访问现场机并实现对其工作模式的控制。该系统的相关功能在实验室模拟调试和观测网接驳联调过程中得到了检验,结果表明该系统达到了接驳入网的标准,可望在海底观测网上得到应用。
海底观测网; OUC-Raman仪器节点; 电源管理; 控制器模块; 系统冗余; 网络通信; 电气保护
随着海洋科学研究的发展,海底观测网络成为海洋观测技术的新兴发展方向之一[1],被称为继海(陆)平面与空中遥感之外的第三种观测平台[2]。海底观测网络能够向海底科研节点提供充足的电力和通信链路,帮助其实现长期、实时、连续的获取海洋环境信息[3]。目前国际上已经建立的海底观测网有加拿大东北太平洋时间序列观测网(North-East Pacific Time-series Undersea Networked Experiments, NEPTUNE)[4],美国的蒙特里加速研究系统(Monterey accelerated research system, MARS)[5]和OOI计划下的区域尺度节点(regional scale node, RSN)[6]。我国近年来对海底观测网关键技术的研发取得了重要进展[7-9],海底网的建设工作也已展开[10-11]。海底观测网的建设对传感器的长期运行能力和自动化程度提出了更高要求。激光拉曼光谱技术由于具有原位、实时、多物质同时非接触探测等优点,是对深海化学环境的有效探测手段[12-13]。为了将深海激光拉曼光谱探测系统[14]应用于正在建设中的海底观测网,本文根据海底观测网的相关电气标准对其现场机进行升级改造,以期达到观测网对水下仪器节点的要求。
1 OUC-Raman水下现场机总体设计
应用于海底观测网的激光拉曼仪器节点(OUC-Raman instrument node)由岸基终端和OUC-Raman现场机两部分组成(总体结构如图1所示)。OUC-Raman现场机通过湿插拔水密接头挂载到观测网的接驳盒上,获取电源供应并通过以太网和岸基终端通信。
如图1所示,岸基终端通过海底观测网提供的以太网络实时访问OUC-Raman现场机并获取光谱数据及舱内设备的工作状态。OUC-Raman现场机是进行水下光谱探测的执行机构,包括一套电子控制系统、两套双备份光谱探测系统以及配套的外部设备,表1中给出了具体的设备列表。其中,光谱探测有单系统或双系统两种工作模式,并由岸基终端进行控制。外部设备包括清洗电机和水下摄像机,前者用于定期清理光学窗口,后者用于监视现场机的工作环境。

图1 基于海底观测网的OUC-Raman仪器节点总体结构Fig.1 Diagram of OUC-Raman instrument node in seafloor observatory network
Table 1 Power consumption of devices in underwater system of OUC-Raman

设备及模块额定功耗/W控制系统≤15光谱探测单系统工作(D1或D2)<55双系统工作(D1和D2)≤70外部设备外部设备P1(水下摄像机)外部设备P2(清洗电机)≤25功耗总计≤110
海底观测网接驳盒有48 V DC和375 V AC两种电源接口可选,其中前者额定功率为240 W。从表1显示的设备功耗统计可以看出,OUC-Raman现场机的最大功耗为110 W,因此选择驳盒48V DC接口即可满足系统用电需求。
图2是OUC-Raman现场机控制系统的总体组成。该系统由电源管理模块和控制器模块组成。电源管理模块包括对输入电源进行调理的前级保护模块和电压变换模块两部分,主要保证舱内控制器和系统负载的用电安全。控制器模块由PC104工控机和MSP430微处理器控制电路组成,实现与岸基工控机的通信以及对现场机内各种设备的综合控制。

图2 水下现场机控制系统总体组成Fig.2 General structure of underwater control system
2 电源管理模块设计
在海底观测网以及相关仪器节点的设计过程中,可靠性占据首要地位。为了保证水下供电体系的整体安全,观测网制定了一系列用电标准并采取主动策略加以管理[15]。当水下节点设备的用电参数超出规定时,次级接驳盒会自动切断与违规设备的电气连接并报警。一般电气设备在上电时,其内部容性组件的充电效应会在供电线路上产生一个远大于额定值的瞬态电流。如果OUC-Raman现场机的开机瞬态电流超出了观测网电气标准,接驳盒的保护机制将会自动触发并造成现场机无法开机。
在传统的瞬态保护电路中通常使用无源器件(如Zener二极管、TVS管等)保护下级电路。这些器件在原理上都是针对过压保护设计的,当电源端出现过压现象时,无源器件能通过调节自身阻抗达到分流稳压的作用。在海底接驳场合,这种传统的保护机制可能会导致系统总电流激增转而触发次级接驳盒的过流保护。因此,OUC-Raman现场机控制系统采用了专门的前级保护模块来管理与接驳盒之间的电能传输,其结构如图3所示。

图3 控制系统电源前级保护模块Fig.3 Diagram of power protector in control system
OUC-Raman现场机的前级保护模块分为输入滤波器、防冲击模块和电气信号采集三部分。防冲击模块是前级保护模块的核心,可以分别检测出输电线路上的过压、过流事件并通过控制电力器件的开关来给予快速平抑。隔离采集模块能够实现对输入电压,电流的隔离采集,用于计算现场机的总功率。
电压变换模块处于电源管理模块的后端,通过DC-DC模块对输入OUC-Raman现场机的总电源进行调理变换,将48 V DC总电源转换为各种设备需要的24、12、5 V等电源(如图2所示)。为了保证整个供电体系在深海环境下安全工作,OUC-Raman现场机采用了隔离型DC/DC模块分级冗余供电的方案提高供电体系的可靠性。电压变换体系的每一级供电单元均配置有电压/电流检测和开关电路,采集到的电气信号由控制器软件判断并控制电源输出开关的通断。
3 控制器模块设计
控制器模块由PC104工控机和MSP430微处理器控制电路两部分组成。两种控制器之间通过串行总线相连接,应用层遵循Modbus总线协议标准。
3.1 PC104控制器设计
PC104工控机是OUC-Raman现场机和岸基终端之间的通信枢纽,对外它通过交换机与接驳盒以太网接口对接[16-17],接收并执行岸基终端的指令;对内它是现场机内部Modbus总线的主机,负责分发岸基终端的指令使光学设备和硬件电路做出响应。
如表2所示,PC104不仅上传拉曼光谱数据,还会实时反馈现场机舱内的环境和电气参数,为有效操作舱内设备提供判据。在数据传输过程中光谱数据以文件流的形式传输,舱内电气与环境数据是以Modbus总线数据/指令帧的形式进行传输。
表2 PC104与岸基控制端通信数据分类
Table 2 Classification of communication data between PC104 and shore-based terminal

数据种类传输格式实现功能光谱数据文本文件每次光谱探测结束后封装上传仪器参数舱内信息总线数据帧设置光谱探测系统参数,读取舱内温度、湿度和电气信号电源控制外部设备操作总线指令帧控制供电模块开关,操作深海摄像头和清洗电机
光谱设备控制是PC104工控机的重要功能,为了保证拉曼光谱数据的准确性,PC104工控机需要对OUC-Raman现场机内部的光谱探测系统进行动态调整。通过PC104工控机,岸基控制端可以根据现场机内部的运行状况在线调整激光器参数或者重新标定光谱仪的波长参数,保证光谱数据的准确性。当现场机完成一次光谱探测后,PC104都会将光谱数据连同舱内信息一并上传到岸基终端。PC104工控机控制软件工作流程图如图4所示。

图4 控制器模块PC104软件工作流程图Fig.4 Program diagram of PC104′s software in controller module
PC104的控制软件需要完成对OUC-Raman现场机电气特性的检测与维护, 由于OUC-Raman现场机内的设备异常与特定故障原因的相关性较为复杂,因此PC104控制软件采用了模糊专家系统对现场机内部传感器信息进行融合推理(如图5所示)。模糊专家系统设定现场机信息采集矢量 U0={S,A,O}作为输入量,其中S={s1,s2,…,sm}表示两个设备舱与舱内光谱设备的开关状态, A={a1,a2,…,an}表示现场机内采集的模拟量,包括舱内的温湿度与主要设备的电气参数,O={o1,o2,…,ok}表示现场及内部PC104和MSP430的通信效率(丢包率)。

图5 工控机模糊专家系统运行流程图Fig.5 Diagram of PC104′s fuzzy controller
如图5所示,工控机控制软件提取信息采集矢量完毕后,会将每个元素分别映射到各自的论域后进行模糊化处理。模糊推理模块根据模糊化的输入矢量诊断出可能的系统故障和可能的诱因。采集矢量的论域映射参数和模糊变量的推理逻辑分别存储在数据库和规则库中,可以灵活地进行更新替换。
本文以光谱探仪故障诊断这个有限集合为例,光谱仪故障设置为运行异常、运行预警和正常运行三个模糊输出(依次对应数字0、1、2)。与之相关的诊断依据包括光谱探测系统输入功率(分为过低、偏低、正常、偏高、过高五个模糊状态,依次对应数字1~5)、光谱仪制冷温度(分为偏低、正常、过高三个模糊状态,依次对应数字0、1、2)以及光谱仪通信效率(对应异常、不稳和正常三个模糊状态,对应数字0、1、2),每个判据的隶属度函数如图6所示。

图6 光谱仪故障诊断判据的隶属度函数Fig.6 Membership function of criteria for spectrometer operation diagnosis
通过隶属度函数将输入参数模糊化为语言变量后,模糊推理模块会将输入参数与规则库比对得出诊断结果。规则库中存储的是一系列逻辑映射集合(如表3所示)。当输入推理模块的模糊变量满足其中某一组合后,控制软件会输出诊断结果及可能的诱因 (功率不稳导致通信异常,制冷效果不佳等)。值得注意的是,光谱仪制冷模块的运行负荷变化可能会引起光谱探测系统功率出现波动,在诊断逻辑中将与之相关的逻辑组合视为正常运行状态。
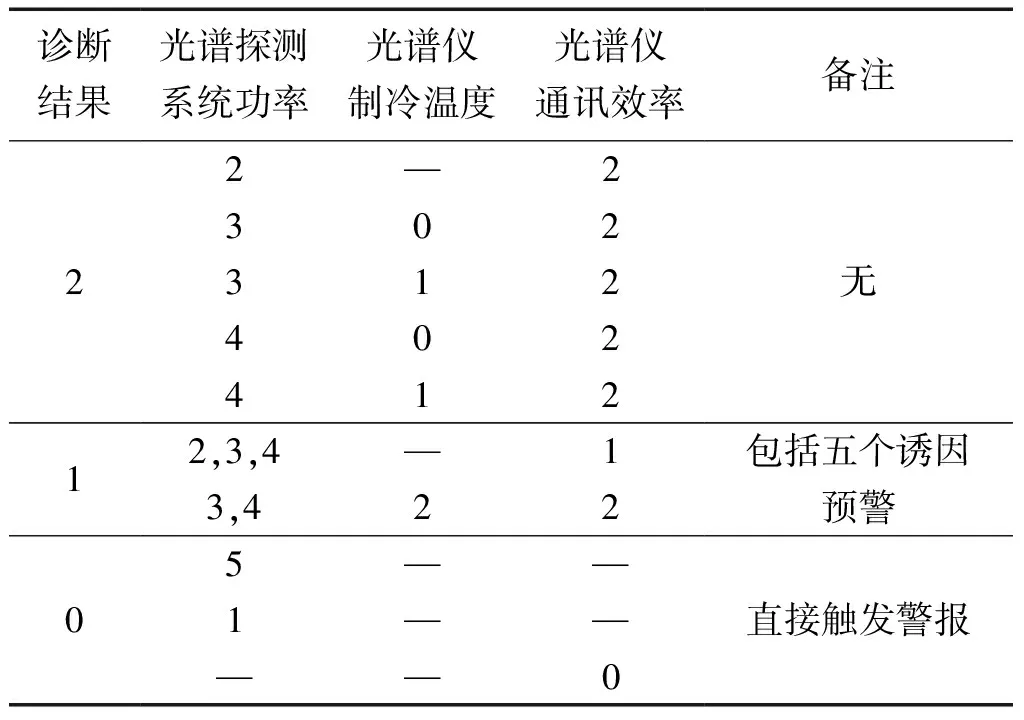
表3 光谱仪故障诊断逻辑对照表
3.2 MSP430控制器设计
MSP430控制器主要实现对底层电路的信息采集和控制功能,其结构如图7所示。MSP430控制模块中配备有AD采集电路和温湿度传感器,在系统运行过程中可以采集水下现场机内部的电源监控信号和环境信息,然后通过内部总线传送给PC104工控机和岸基终端。

图7 MSP430控制模块结构图Fig.7 Diagram of controller module based on MSP430 processor
MSP430微处理器控制电路中集成有基于定时器的嵌入式控制软件,通过串行总线接收来自PC104主机的指令同时完成系统各种信号的采集任务。嵌入式软件内部集成了Modbus通信协议,其工作流程结构如图8所示。

图8 控制器模块MSP430软件工作流程图Fig.8 Program diagram of MSP430′s software in controller module
由于嵌入式系统内部资源较为有限,因此在设计中将接受缓存区以环形栈的形式加以实现,有效防止了数据溢出。当Modbus数据流到达,MSP430模块首先将数据流存储在环形栈中,然后通过定时器算法将数据流拆分为有效的数据帧,最后通过解析器将发往本机的数据帧压入帧队列等待前台处理。在实际运行时,总线任务与通信任务工作在非阻塞状态下,避免了对主控任务的干扰。嵌入式软件缓冲区与消息队列设计如图9所示。

图9 MSP430接收缓存区设计Fig.9 Design of MSP430′s modbus packet buffer
3.3 冗余控制方案
在OUC-Raman现场机控制系统中PC104工控机负责链接现场机内外网络间的通信,是控制系统可靠性的薄弱环节。为了提高控制系统的整体稳定性,现场机内部的工控机采用了如图10所示的双备份冗余方案。

图10 PC104双备份冗余方案Fig.10 Dual-redundancy solution of PC104 controllers
在双控制器冗余控制方案中的两台PC104工控机各自具有独立的网络地址。作为主机的PC104在运行过程中需要通过总线向MSP430模块发送周期性的心跳信号表征自身工作状态。如果MSP430模块在规定的时间没有收到来自工控机的心跳信号,将自动切换供电次序转而启动备份工控机接管水下现场机。
4 性能测试与现场联调
对OUC-Raman现场机的性能测试包括实验室模拟调试和为期36 d的观测网接驳联调。在实验室模拟调试中使用48 V外部电源向现场机供电,岸基控制端通过室内局域网对现场机进行控制和数据交互。在接驳联调中OUC-Raman现场机与正在建设的观测网接驳盒进行物理接驳,岸基终端在控制室中对水池中的现场机进行控制操作。在测试过程中对OUC-Raman现场机的电气特性、舱内环境监测功能和通信功能进行了检验,其中对电气特性和环境监测功能的测试主要是在实验室模拟调试过程中完成的。
4.1 电气特性测试
对OUC-Raman现场机的电气特性测试首先是检验其运行功耗,在实验室90 h的模拟调试过程中,岸基终端实时获取了现场机所监测的总功率和内部设备功率(D1探测模式),结果如图11所示。

图11 OUC-Raman现场机设备功耗90 h模拟调试监测结果Fig.11 Power consumption of devices of underwater system in 90 h operation test
从图11中可以看出,OUC-Raman现场机在整个测试过程中自身总功耗稳定在100 W以下(86~92 W,如图11曲线a),与表1计算结果吻合。与此同时外部设备功率(摄像头和清洗电机总功率,如图11曲线b)和P控制系统功率(如图11曲线c)也都满足设计指标(表1所示)。在测试过程中现场机进行过一次重启操作(图11中TM时段),对重启上电瞬间的电压与电流波形进行了记录,记录结果如图12所示。

图12 OUC-Raman现场机上电瞬间电源线路波形Fig.12 Wave pattern in power line during OUC-Raman underwater system starting up
从图12可以看出,OUC-Raman现场机的开机冲击电流受到了电源前级保护模块的平抑,表4列出了现场机电气特性参数与观测网络电气标准的对比。
根据波形记录与观测网参数标准对比可以看出,OUC-Raman现场机自身的电气特性在额定功率和瞬态特性上均满足海底观测网的相关电气标准并保持一定裕量。
表4 冲击电流测试结果与观测网标准对比
Table 4 Comparison of the results in rush current test with seafloor observatory network standard

指标电流阈值/A过流时间阈值/ms额定功耗/W峰值功率/W现场机测试指标613≤90≤92观测网入网标准7<5<200<240系统裕量/%87455612
4.2 舱内环境监测
在实验室模拟调试中,还实时监测了舱内环境参数,监测数据如图13所示。

图13 舱内环境90 h(2015.10.1 19∶38-2015.10.5 13∶46)模拟调试监测结果Fig.13 Environmental parameters recording in 90 hours (from 19∶38 of Oct. 1 to 13∶46 of Oct. 5, 2015) operation test
从图13的数据记录中发现,在经过TM时段的重启操作后OUC-Raman现场机舱内的环境参数(温度、湿度、气压)均出现了不同程度的波动。这是因为激光器在刚启动时暂时工作在高功率状态,散发的多余热量导致了舱内温度、湿度和压强数据的变化。现场机舱内环境参数在图13中波动的起始时刻t1、峰值时刻t2以及结束时刻t3与光谱探测系统的功率变化基本吻合,控制软件内的故障诊断模块也对这一现象做出了正确识别,没有触发运行预警。
4.3 通信测试
对OUC-Raman现场机通信功能的测试分为三个阶段,主要测试内容是岸基终端和现场机之间光谱文件和总线数据的传输状况。第一阶段的测试是在实验室模拟调试过程中完成的,测得了90 h实验室模拟调试过程中的数据传输效率。实验室模拟调试后OUC-Raman现场机参加了接驳联调试验。由于联调现场环境较实验室环境更加复杂,现场机的数据传输成功率在测试前一阶段较实验室模拟调试阶段有所下降,并发现存在初始化光谱仪失败和PC104备份机误切换等问题。针对以上问题,在接驳联调测试后期对现场机控制软件进行了相应的改进,修改了PC104工控机的控制软件并优化了对光谱仪的控制时序。三个阶段的测试结果如表5所示。
表5 OUC-Raman现场机通信功能测试结果
Table 5 Result of communication test for underwater system

测试阶段传输数据类型现场机应传数据量岸基终端接收数据量传输正确率/%模拟调试光谱文件20162016100总线数据帧388635969253接驳联调1光谱文件59515951100总线数据帧13001117459034接驳联调2光谱文件24332433100%总线数据帧473745209542
通过对比表5数据可以看出,现场机与岸基终端之间的光谱文件传输效率始终稳定在100%,总线通信效率在经过接驳联调测试中的改进后也较前两个阶段有所提高。
5 结论
1)针对海底观测网的应用需求设计的冗余体系和电气保护模块能够提高OUC-Raman节点现场机的可靠性,在改善系统的动态电气特性的同时也达到了观测网的安全标准要求。
2)现场机系统需要在海底长期自动运行,本文根据其工作特点设计了一种冗余控制体系,实际测试证明该设计能够满足现场机系统对可靠性的要求。在实际运行过程中,岸基控制端可以通过观测网提供的以太网链路实时分析光谱数据并监控现场机内部仪器的运行情况,识别并平抑可能发生的设备异常。
3)对于OUC-Raman现场机在水下长期运行作业中可能出现的故障,本文设计并实现了一种基于模糊控制理论的故障检测算法。工控机内模糊专家系统可以融合现场机内收集的各种传感器信息综合分析系统的运行状态,准确识别系统的内部异常并为岸基控制端的操作人员提供解决方案。
对OUC-Raman现场机进行的实验室模拟调试和观测网接驳联调的结果显示该系统满足接驳入网的标准,进一步的海上试验和数据分析将是我们下一步研究的重点。
[1]朱心科, 金翔龙, 陶春辉, 等. 海洋探测技术与装备发展探讨[J]. 机器人, 2013, 35(3): 376-384. ZHU Xinke, JIN Xianglong, TAO Chunhui, et al. Discussion on development of ocean exploration technologies and equipments[J]. Robot, 2013, 35(3): 376-384.
[2]汪品先. 从海底观察地球——地球系统的第三个观测平台[J]. 自然杂志, 2007, 29(3): 125-130. WANG Pinxian. Seafloor observatories: the third platform for earth system observation[J]. Chinese journal of nature, 2007, 29(3): 125-130.
[3]MORAN K. Canada′s cabled ocean networks humming along[J]. Eos, transactions American geophysical Union, 2013, 94(2): 17-19.
[4]BARNES C R, BEST M M R, JOHNSON F R, et al. Challenges, benefits, and opportunities in installing and operating cabled ocean observatories: Perspectives from NEPTUNE Canada[J]. IEEE journal of oceanic engineering, 2013, 38(1): 144-157.
[5]MASSION G. MARS: The Monterey accelerated research system[J]. Sea technology, 2006, 47(9).
[6]YINGER P, TENNANT P, REARDON J, et al. Commissioning of a system that terminates on the seafloor[C]// Oceans,San Diego, 2013: 1-6.
[7]汪品先. 从海洋内部研究海洋[J]. 地球科学进展, 2013, 28(5): 517-520. WANG Pinxian. Oceanography from inside the ocean[J]. Advances in earth science, 2013, 28(5): 517-520.
[8]CHEN Yanhu, HOWE B M, YANG Canjun, et al. Actively controllable switching for tree topology seafloor observation networks[J]. IEEE journal of oceanic engineering, 2015, 40(4): 993-1002.
[9]杨灿军, 张锋, 陈燕虎, 等. 海底观测网接驳盒技术[J]. 机械工程学报, 2015, 51(10): 172-179. YANG Canjun, ZHANG Feng, CHEN Yanhu, et al. Technologies of junction box for seafloor observation network[J]. Journal of mechanical engineering, 2015, 51(10): 172-179.
[10]吕枫, 周怀阳, 岳继光, 等. 东海缆系海底观测试验网电力系统设计与分析[J]. 仪器仪表学报, 2014, 35(4): 730-737. LYU Feng, ZHOU Huaiyang, YUE Jiguang, et al. Power system design and analysis for the East China Sea experimental cabled seafloor observatory network[J]. Chinese journal of scientific instrument, 2014, 35(4): 730-737.
[11]吴邦春, 彭晓彤, 周怀阳, 等. 基于海底观测网的深海化学监测系统的设计[J]. 仪器仪表学报, 2011, 32(5): 1171-1176. WU Bangchun, PENG Xiaotong, ZHOU Huaiyang, et al. Design of deep-sea chemical monitoring system based on ocean observatory[J]. Chinese journal of scientific instrument, 2011, 32(5): 1171-1176.
[12]ZHANG Xin, WALZ P M, KIRKWOOD W J, et al. Developmentand deployment of a deep-sea Raman probe for measurement of pore water geochemistry[J]. Deep sea research part I: oceanographic research papers, 2010, 57(2): 297-306.
[13]ZHANG Xin, KIRKWOOD W J, WALZ P M, et al. A review of advances in deep-ocean Raman spectroscopy[J]. Applied spectroscopy, 2012, 66(3): 237-249.
[14]DU Zengfeng, LI Ying, CHEN Jing, et al. Feasibility investigation on deep ocean compact autonomous Raman spectrometer developed for in-situ detection of acid radical ions[J]. Chinese journal of oceanology and limnology, 2015, 2(33): 545-550.
[15]LI Xiu, ZHOU Linfei, GAO Fuxin. Application of SOA in the prototype system for seafloor observatory Network[C]// International Conference on Service Sciences, 2013: 139-142.
[16]卢汉良, 李德骏, 杨灿军,等. 深海海底观测网络水下接驳盒原型系统设计与实现[J]. 浙江大学学报:工学版, 2010, 44(01): 8-13. LU Hanliang, LI Dejun, YANG Canjun, et al. Design and implementation of underwater junction box prototype system for deep seafloor observatory network[J]. Journal of Zhejiang University: engineering science, 2010, 1: 8-13.
[17]李德骏, 汪港, 杨灿军, 等. 基于 NTP 和 IEEE1588 海底观测网时间同步系统[J]. 浙江大学学报: 工学版, 2014 (1): 1-7. LI Dejun, WANG Gang, YANG Canjun, et al. NTP/IEEE1588-based time synchronization system in seafloor observatory network[J]. Journal of Zhejiang University: engineering science, 2014, 48(1): 1-7.
本文引用格式:
刘晓瑞,亓夫军,叶旺全,等. 海底观测网的OUC-Raman节点现场机控制系统[J]. 哈尔滨工程大学学报, 2017, 38(8): 1216 -1222.
LIU Xiaorui, QI Funjun, YE Wangquan, et al. Underwater control system of ouc-raman instrument node for seafloor observatory network[J]. Journal of Harbin Engineering University, 2017, 38(8): 1216 -1222.
Underwater control system of OUC-Raman instrument node for seafloor observatory network
LIU Xiaorui, QI Funjun, YE Wangquan, SONG Zhiyu, ZHENG Ronger
(Lab of Optics and Optoelectronic, Ocean University of China, Qingdao 266100, China)
To meet a seafloor observatory network′s requirements for instrumental nodes, an underwater control system of an OUC-Raman instrument was developed. The system consists of a power management module and controllers. It extracts power and Ethernet order from a seafloor observatory network to manipulate internal spectral devices and other outer devices. The power management module ensures that the electronic character of the on-the-spot instrument meets the standard of seafloor networks. The controller module, which is configured with PC104 and MSP430 units, realizes effective control of the spectral detection system of the on-the-spot instrument and outer devices, as well as enables a shore-based terminal to manipulate underwater instruments. Through the control system, the shore-based terminal could access the OUC-Raman instrument node in real time to set operation parameters and collect data. The system was subjected to several tests with satisfactory results. The developed system is expected to be used in seafloor observatory network in the near future.
seafloor observatory network; OUC-Raman instrument node; power management; controller module; systematic redundancy; Ethernet communication; electric protection
2016-04-27.
日期:2017-04-27.
国家高技术研究发展计划(2012AA09A405).
刘晓瑞(1991-), 男, 博士研究生; 亓夫军(1964-), 男, 副教授; 郑荣儿(1959-), 女, 教授, 博士生导师.
亓夫军, E-mail:qd01232@163.com.
10.11990/jheu.201604086
P715.5
A
1006-7043(2017)08-1216-07
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170427.1510.078.html
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
空间科学学报(2021年1期)2021-05-22
铁道通信信号(2020年12期)2020-03-29
现代电子技术(2019年1期)2019-01-10
制造技术与机床(2018年11期)2018-11-23
大陆桥视野·下(2017年5期)2017-06-19
通信电源技术(2016年6期)2016-04-20
中国光学(2015年5期)2015-12-09
食品工业科技(2014年23期)2014-03-11
自动化博览(2014年6期)2014-02-28
