
汽车自适应巡航系统的多模式控制
2017-09-03 10:57中国空空导弹研究院李贺男
电子世界 2017年16期
中国空空导弹研究院 李贺男
汽车自适应巡航系统的多模式控制
中国空空导弹研究院 李贺男
由于汽车经常行驶在复杂的交通环境下,因此前车的运动状态和意图往往是不可预知的,所以对于传统的自适应巡航控制系统就产生了很大的限制。基于这个原因,本文将提出一种可以多模式控制的自适应巡航系统,它可以根据实际自动选择合适的模式。本系统分别设计定速巡航,稳态跟随,接近前车,强加速,强减速和避撞六种控制模式,设计相应的控制器并加以整合,从而改善系统整体的控制效果。本文主要讲述稳态跟随模式,并基于这一模式进行对其他模式进行构想设计。
ACC系统;PID
前言
先进的辅助驾驶系统目前已是国内外研究的主流和豪华车的普遍装备,ACC自适应巡航系统通过代替驾驶者控制节气门和制动系统,从而解放驾驶者一部分注意力,但是由于道路情况的瞬息万变,比如前车的不断切入和切出,会导致一定安全隐患,而且影响汽车动态的跟踪性能以及驾驶的舒适性。因此本文将提出一种基于原始ACC系统,通过运用模糊PID控制从而实现多模式控制的ACC系统。本文将分模糊PID控制的简介,多模式控制流程,系统中多种模式的介绍,以及本系统的前景和展望等四部分讲述。
1 模糊PID控制的简介
首先这套多模式ACC系统达到的目标是比原始的ACC系统更加灵活,反应更加迅速,也更加智能从而提高行驶安全性,因此将采用随机性更高的模糊PID控制。
1.1 传统PID控制的优点与缺点
优点:PID控制能够适应各种控制对象,具有极强的适应性特点,只要参数整定合适,可以实现无差控制,稳态性能好;
缺点: PID控制不具有自适应控制能力,动态特性不太理想,当系统参数发生时变、非线性变化时,系统控制效果不佳,严重时会导致系统不稳定。
虽然PID控制具有一些局限性,但是由于其优点显著,仍在工业过程控制领域占据主导地位,而且经过全世界的控制技术研究和应用人员的探索研究,结合模糊控制,极大的改善PID控制的性能,形成了模糊PID控制系统。
模糊控制的特性在于其不依赖于系统的精确数学模型,当系统参数发生变化时,不会影响系统的稳定性,因此具有很强的鲁棒性。

图1 汽车巡航模糊控制原理
1.2 模糊控制技术概述
模糊控制是以人的直觉和经验为主导,也就是说,操作人员对被控系统的掌控不是通过精确的数学表达式,而是通过其直觉和丰富的实践操作经验,这种方法称作探索式决策。
模糊控制作为智能控制的一个重要分支,已在控制领域获得了广泛应用。模糊控制是以模糊语言变量、模糊集合论和模糊逻辑推理为基础的一种计算机控制方法,其核心是模糊控制器,而模糊控制器的关键是模糊控制规则表,模糊控制规则表是根据经验丰富操作者的手动控制经验总结出来的一系列控制规则。

模糊控制系统框图如图2所示。
在模糊控制中,用模糊概念来表述输入和输出变量,模糊控制的基本论域为误差变化率ec、误差e和输出y的实际变化范围,e和ec称为输入语言变量,y称为输出语言变量。语言变量是一个模糊集合,语言变量值根据问题需要确定,语言变量值是构成语言变量的词集。对于输入变量e、ec取基本论域内的一个实际值,根据语言变量值的隶属度函数,需将其转化为语言变量值,这种转化的过程叫模糊化。一般在一个模糊规则的前件中往往不只有一个命题,需要用模糊算子获得该规则前件被满足的程度。将一条规则的整个前件被满足的隶属度作为输入,根据规则“如果x是A,则y是B”,表示的A与B之间的模糊蕴涵关系(A→B)进行模糊推理,可以得到一个输出模糊集,这种过程称为模糊推理。模糊推理,是一种以模糊推断为前提,运用模糊语言规则,推出一个新的近似的模糊推断结论的方法。

图2 模糊控制系统框图
模糊推理的关键是模糊控制规则的确定,即模糊控制规则表,模糊控制规则表是根据经验丰富的操作者的手动控制经验总结出来的一系列控制规则。由于模糊规则库由多条规则组成,经过模糊推理得到的是一个由每一条规则推理得出的输出语言变量值的集合,因此需要将这些输出语言变量值进行某种合成运算,得到一个综合的输出模糊集,这种过程称为模糊合成。将经过模糊合成得到的综合输出模糊集进行转化,对被控过程进行控制,这种过程叫模糊判决或者叫去模糊化。
1.3 模糊-PID 复合控制
控制策略是:在小偏差范围内,即e落到阈值之内时转换成 PID(或 PI)控制,以获得良好的稳态性能;在大偏差范围内,即偏差 e在某个阈值之外时采用模糊控制,以获得良好的瞬态性能。微机程序根据事先给定的偏差范围自动实现二者的转换阈值。常用的是Fuzzy-PI 双模控制,其由模糊控制和 PI 控制两种控制模式相结合。
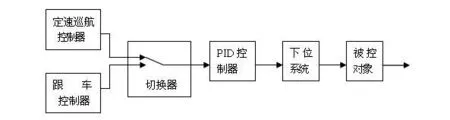
图3 巡航系统的工作原理图
2 多模式控制流程
为了实现ACC的多模式控制,我们将设计模式切换层,在模式切换层中,需要合理分配控制模式的调用顺序,并且保证驾驶员的优先控制权。
3 系统中各个模式的简介
这套系统将ACC系统分为六种模式,其中以稳态跟随模式为主,因为ACC的主要功能和初衷就是稳态跟随功能。其余五种模式均是基于此模式延伸而来。
3.1 稳态跟随模式
在实际行驶跟车过程中,驾驶员以稳态跟车为主,期望车距误差与相对车速保持在误差范围内。由于驾驶员对跟踪误差的敏感度不同,会随着车距和车速的而发生变化。因此在前车稳态行驶工况,则采用如下图所示的线性结构使得车距与车速误差同时收敛为0。

式中,kf取决于车速的大小,车速越大,驾驶员期望的加速度波动越小, λf反映了不同驾驶员对于速度误差和距离误差的敏感程度不同,根据所查资料统计,稳态下λ值在11左右时,距τ由驾驶员设定。τ值越大,自动跟车距离越远,驾驶风格越保守。
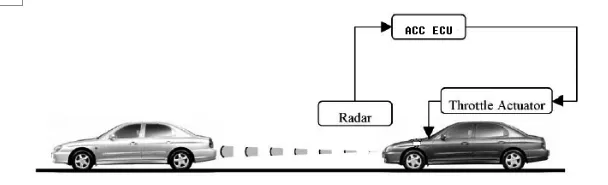
图4 ACC跟车系统工作图
3.2 基于稳态跟车模式的多模式扩展设想
1)定速巡航模式。前方有效距离内不存在目标物时,系统进入定速巡航模式,希望实际车速尽可能保持在设定车速附近土1km/h范围内。
2)接近前车模式。前方有慢速车辆进入有效距离内,而此时定速巡航时,系统由此进入接近前车模式。在此模式下,初始距离d远大于期望车距ddes,而且两车的初始的相对车速绝度值较大。此模式将期望以距离来补偿速度误差,最终平稳过渡到稳态跟随模式。
3)强减速模式。当旁车强行并线或前车紧急减速时,系统进入强减速模式。在此模式下,相对车距d处于期望车距之下,并且相对车速Vr小于0,因此期望设定一个最小安全距离代替期望车距作为车距控制目标的下限从而实现车辆的强减速。
4)急加速模式。由于车辆在急加速的模式下,车辆通常是没有追尾的危险的,驾驶者可以容忍较大的跟踪误差和车距变化。因此,可以根据稳态模式中的模型,放宽跟踪性能的要求,重新标定相关参数。
5)避撞模式。当强减速模式仍不足以提供足够的制动减速度,导致实际距离小于最小安全距离,系统将进入紧急避撞模式,通过施加最大制动力直至停车,其中车距可以根据车距传感器测出。而且此模式下的ACC系统可以和PSS系统的紧急制动辅助系统进行协作。
综上所述,以上的五种模式的设计均可以通过对稳态跟随模式的相关系数的重新标定或者对相关模型进行相应改进实现。
4 本系统的前景和展望
ACC系统未来将向更加智能化发展,而且汽车的发展方向也是如此,因此不能适应多变环境的ACC系统及其他汽车系统终将被淘汰,本文介绍的多模式ACC系统具有更强的灵活性和随机性,很好的对现今的ACC系统的缺陷进行了弥补。因此,我认为这套多模式ACC系统十分具有市场前景,而且其中的模糊PID控制方法也将成为未来汽车甚至其他行业进行控制设计时的的主流。
[1]裴晓飞,刘昭度,马国成.一种汽车巡航控制的分层控制方法[J].北京理工大学学报,2012.
[2]张德兆,王建强,刘佳熙.加速度连续型自适应巡航控制模式切换策略[J].清华大学学报,2010.
[3]裴晓飞,刘昭度,马国成,齐志权.汽车自适应巡航系统的多模式切换控制[J].机械工程学报,2012.
[4]苏明等.模糊PID控制及其MATLAB仿真[J].计算机应用学报,2004.
[5]刘金琨.先进PID控制及其MATLAB仿真[M].西安:电子工业出版社,2008.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
装备制造技术(2018年8期)2018-10-17
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
电子测试(2018年1期)2018-04-18
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
