
基于物联网的水体环境监测无人船的设计
2017-09-07 23:18吴珊珊刘清闯王书旺顾斌
数字技术与应用 2017年5期
吴珊珊+刘清闯+王书旺+顾斌

摘要:本文基于物联网技术,设计了一种用于水体环境监测的无人船。系统由动力模块、测量模块、通信模块、GPS定位模块等组成,并引入非接触供电、无线通信等技术。经过实测可见,本系统不仅实现了小型化、无人化和低成本,跟踪定位的网格化,满足了精细化测量需求,信息传递的快速、可靠、稳定,而且通过太阳能等新能源的使用,使其既防止了传统燃料对水体的污染,又可以在其生命周期内永不停息地工作。
关键词:物联网技术;水体环境监测;新能源;无人化
中图分类号:TP274 文献标识码:A 文章编号:1007-9416(2017)05-0165-02
作为影响国计民生最重要的自然资源之一,水资源在社会生活及工业生产中具有举足轻重的地位。我国尽管总量丰富,却面临着人均占有量较低、水资源空间分布不均匀等困难[1]。造成水资源缺乏的原因很多,其中由于水体环境恶化而导致的水质型缺水是一个重要方面[2],因此,对水体环境,主要是各种水质参数的监测已为各级政府所重视。水体环境监测的信息化则是该领域技术的发展方向。若能基于物联网技术,对水体的各项物化参数(如温度、PH值、透光率,含氧量等)进行完整采集,并最终实现网格化、多元化和菜单式的物化参数监测,对于保护水资源环境、实现水资源的高效利用具有重要意义。
无人船(Unmanned Surface Vehicle, USV)由于具有布放灵活、成本经济,可以在人迹罕至或人迹难至的工作区域自动测量等明显的技术优势,已引起了国内外众多学者的关注。在国外,以美国哈希(Hash)公司为代表,提出了基于Hydrolab的多参数水质监测仪的设计方案,其监测参数包括溶解氧、电导率等十五种参数。但是它必须搭配一定的载体才能完成任务,而且价格十分昂贵。在国内,众多学者也相继在这一领域展开了研究。如李广武、韦晓强所提出的一种多功能深水环保船[3],主要用于海面溢油回收,兼具对小块漂浮垃圾的回收功能;金英连等提出的自主湖水环境监测船[4],可以实现水体环境的全自主监测;林群馥等提出的无人驾驶水域环境智能监测船[5],可已代替人完成偏远或恶劣环境下的全天候水域环境监测。
本文研究并设计了一种智能化水体环境监测无人船,系统基于物联网技术,实现对水体的各项物化参数网格化的完整采集,后通过无线通信技术将信息传输至控制中心作进一步处理,完成对水体环境的监测。此外,控制中心亦可通过反向链路数据采集系统对移动载体(船体)动力系统进行控制,以实现网格化、多元化和菜单式的物化参数监测。与现有相关研究相比,本系统具有使用方便、结构简单、成本低、可扩充性强等优点,一方面满足了广域化分布式的需求,同时也消除了用户对人力成本高昂的顧虑。
1 系统整体结构
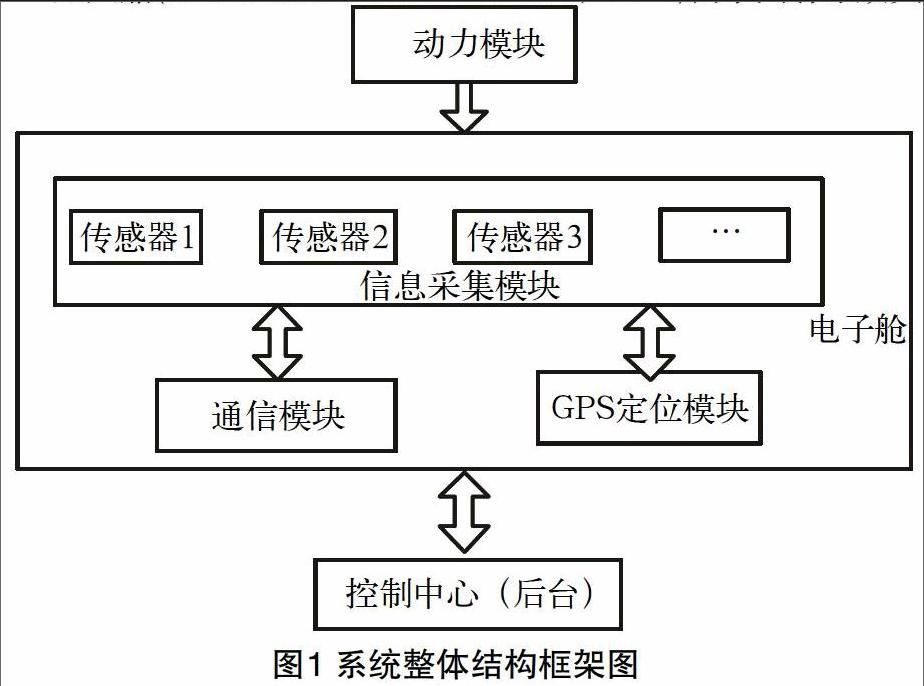
按照动能划分,全系统由动力模块和电子舱构成。其中,动力模块使用太阳能电池作为能源,并实现对其他各模块的非接触供电;电子舱包括测量模块、通信模块、GPS定位模块。信息采集模块由温度、透光率、光照强度、PH值等传感器及信号处理电路组成;通信模块基于ZigBee技术进行自组网,基于蓝牙技术实现点到点的传输,基于工作在433MHZ的无线模块实现对广域网的接入;GPS用来实现船体定位,以实现定位和网格化的自动采集。系统整体结构框架如图1所示。
2 主要组成模块及关键技术介绍
2.1 动力模块
作为一种可再生的新型环保绿色能源,太阳能在实际生产应用中逐渐被人们所关注。本系统采用非晶硅太阳能电池进行供电,既能防止传统燃料能源污染水体,又能保证系统电源的稳定。非接触供电是指与物理接触的电力传输模式,是第二次无线通信,无线网络经过第三次无线革命后,业界作为基础应用的尖端技术,其广泛的跨产品应用,有望推动国家和世界通信、电子、网络、新能源等行业的突破和创新。
2.2 测量模块
测量模块是由单片机、方波发生电路、量程换挡电路、检波电路、A/D转换电路、键盘控制电路、传感器和液晶显示电路组成。其中传感器可以根据使用需求选择PH、温度、氧、电导率、透光率等,并且进行扩展。以电导测量为例,其组成框图如图2所示。
如图2所示,方波发生电路产生占空比为50%的正负脉冲为1V的电压加到电导的两端,经过电导池的电流经过量程换挡电路放大后变为电压信号,通过检波电路将电压峰—峰值变化为电压有效值,经过AD转换电路后送入单片机,完成电导率数据的采集。然后进行溶液温度的采样,通过软件编程对温度进行补偿,计算得到被测溶液在25℃基准温度下的电导率。将最后的结果通过LCD显示出来。
2.3 通信模块
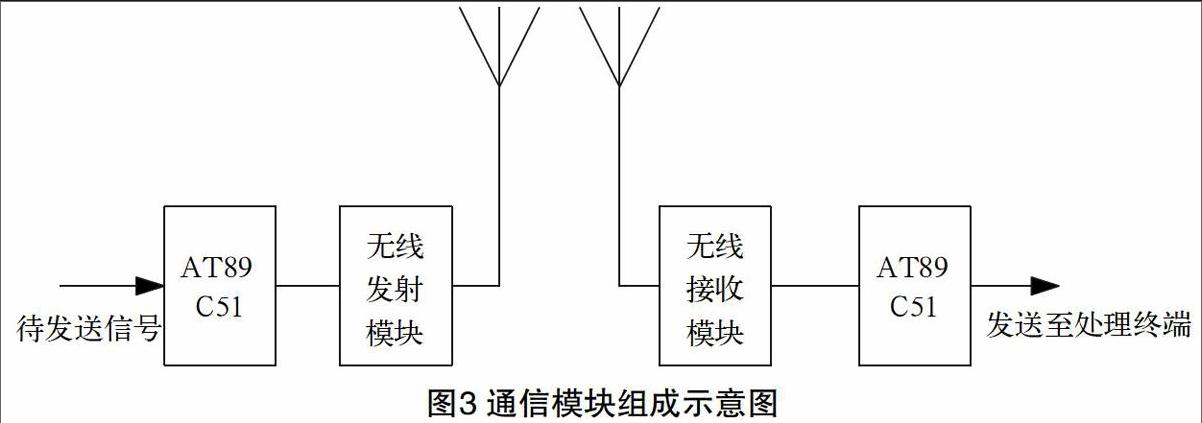
如图3所示,通信模块由无线发射节点和无线接收节点组成。其中,无线发射节点由无线发射模块和单片机AT89C51组成。要发射的数据被送入单片机中后,即由AT89C51控制无线发射模块将数据信息发送出去。本系统中的无线发射模块E12-TTL工作在433MHz频率上,工作电压约3.3V,通过单片机设置不同的响应时间、状态切换等形式,可以支持不同的功耗等级,从而达到整个系统低功耗的目的。当整个无线发射节点正常工作时,其功耗不超过300mw,通信速率为19.2Kbps。无线接收节点由无线接收模块和单片机AT89C51组成,负责接收来自无线发射模块的数据,并送入数据处理中心。
2.4 GPS模块
本文选择的是鹏腾俐科技有限公司的GPS天线加上我们自己所设计的电路才组成的模块,主要由供电部分、GPS模组和天线组成,用于船体定位,该功能可以实现对大范围水域进行全覆盖拉网式监测,即使远距离作业也能随时跟踪船体位置,获知测试点地理位置。
3 测试及结果分析
将本系统应用于校园内水域的水体环境参数监测,在下水测试前,需要对动力模块及测量模块进行调试。首先观察系统在非接触式供电条件下,是否能够在水里自由游动。endprint
3.1 定位模块测试
在使用定位功能前,需打开提前安装好的百度地图API,后将系统放入测试水域,利用GPS模块实现船体定位,该功能可以实现对大范围水域进行全覆盖拉网式监测,即使远距离作业也能随时跟踪船体位置,获知测试点地理位置。定位结果表明,在空旷水域,系统的定位误差小于3米,而在非空旷水域,定位误差为5—10米。
3.2 测量模块测试
测量系统的调试框图如图4所示。其中,芯片3140的输入为传感器所采集的信号,其实质为跟随器,若输入信号等于输出,则表示这部分正常。而后,3140输出的模拟信号将进一步送入AD模块,转换成数字信号。生成的数字信号送入MCU,通过液晶屏来显示。显示的数据可以存储到芯片中。测量模块的供电部分,主要是由无线供电。然后经过一个升压模块将原来的3.7V升至5V。给整个测量电路供电。
系统可以对温度、电导率、透光率、PH值和氮氧含量等物理化学参数进行检测,并且对各类水域加以区分。这也是本系统最重要的一个优势,其拓展性非常强,根据不同的水域,可以搭载不同的传感器来监测。以测量PH为例,本文对正常条件下湖泊参数和自来水的参数进行了测试,通过实验可见,PH值测试模块可以区别自然水体与自来水。此外,温度模块的测量误差小于2摄氏度。
4 结语
本文以物联网相关技术为核心,设计了一种智能化全自动水体环境监测无人船。系统的创新点主要体现在如下几个方面:
(1)与传统的实体测量船相比,实现了小型化、无人化和低成本,一方面满足了广域化分布式的需求,同时也消除了用户对人力成本高昂的顾虑。
(2)跟踪定位实现了网格化,满足了精细化测量需求。
(3)自組联网后台管理,实现了信息传递的快速、可靠、稳定。
(4)太阳能等绿色能源的有效使用,一方面防止了传统燃料对水体的污染,同时,只要用户的如下要求存在:要求它在其生命周期内永不停息地工作,它照样能满足。
参考文献
[1]王忠福.我国水资源利用中的问题与可持续利用对策[J].西安邮电学院学报,2011,5(16):122-127.
[2]黄耀欢,王浩,肖伟华,秦大庸.内陆水体环境遥感监测研究评述[J].地理科学进展,2010,5(29):549-556.
[3]李广武,韦晓强.多功能深水环保船建造检验要点综述[J].2016,5(38):15-23.
[4]金英连,王斌锐,严天宏.自主湖水环境监测船的运动控制系统设计[J].2012,11(38):240-243.
[5]林群馥,傅隆亮,陈晓斌,曹阳,林建.无人驾驶水域环境智能监测船[J].2014,2:169.endprint
猜你喜欢
海峡姐妹(2019年8期)2019-09-03
商情(2016年40期)2016-11-28
瞭望东方周刊(2016年40期)2016-11-02
科学与财富(2016年28期)2016-10-14
风能(2015年4期)2015-02-27
风能(2015年4期)2015-02-27
小学生导刊(高年级) (2006年6期)2006-06-27
