车辆目标特征量提取技术研究
2017-09-14 06:48北京信息科技大学冯清娟唐胜春
电子世界 2017年17期
北京信息科技大学 冯清娟 唐胜春
车辆目标特征量提取技术研究
北京信息科技大学 冯清娟 唐胜春
在图像跟踪系统中,目标特征量的有效提取至关重要。本文以一组运动目标(汽车)的序列图像为研究对图中每个像素赋予不同的RGB值时,就能呈现出五彩缤纷的颜色,即形成了彩色图。
1. 引言
用计算机代替人去认识图像和找出一幅图像中人们感兴趣的目标物,是数字图像处理的一个重要目的。本文以一组运动目标(汽车)的序列图像为研究对象,针对图像中运动目标(汽车)的平移、旋转等变化情况,实现了基于目标颜色、灰度投影、边缘提取与轮廓跟踪、种子填充的特征量提取算法,并对所提取的特征量进行列表分析,力求找出比较有效的特征量提取方法。
2. 基本预处理过程
图像跟踪的预处理过程包括颜色提取、平滑滤波和阈值分割三个步骤之后,再进行特征量提取。
2.1 图像颜色提取
自然界中的所有颜色都可以由红、绿、蓝(R,G,B)组合而成的。针对所含有颜色成分的多少,可以分成0到255共256个等级,这种分级的概念称作量化。当一幅图中每个像素赋予不同的RGB值时,就能呈现出五彩缤纷的颜色,即形成了彩色图。
本文所采用的一组彩色汽车图片即为24位色图。抽取其中一帧(图1)通过实验发现,提取红色分量后的效果最好,所以本文采用提取红色分量的方法来提取小车,提取之后的效果如图2所示。

图1 原图像

图2 提取红色分量之后的效果图
2.2 图像平滑滤波
本文采用了一种简单的平滑滤波算法,即邻域平均法。即是将原图中的每一点的灰度和它周围24个点的灰度相加,然后除以25,作为新图中对应点的灰度,表示如下:

这种表示方法有点像矩阵,我们称其为模板(template)。中间的黑点表示中心元素,即是,用哪个元素作为处理后的元素。通常,模板不允许移出边界,所以结果图像会比原图小,为了避免这种情况,我们引入“补”的概念,就是给边界的外邻域补上图像数据。补的方法很多,本论文采样了对称补的方法,比如在图像的右边界的右侧补上边界左侧的图像数据。本文中采用了5×5平滑滤波,经过两次平滑滤波后的效果如图3。

图3 提取红色分量之后的效果图

图4 阈值分割之后的效果图
2.3 图像域值分割
严格的说,阈值分割并不是图像预处理的一部分,而是图像分割技术的一种重要方法,但本文所提的特征量提取算法大多都是在阈值分割后的图像上完成,故在本文中作为图像预处理的一部分。本文采用高斯模板加权求取阈值。这种方法的优势在于其阈值可随整幅图像的灰度均值与局部方差而改变,它不受限于灰度的分布是否满足双峰形状。这也是它比直方图法的优越之处。单阈值分割法后得到的效果如图4所示。
3. 特征量的提取
本文主要研究基于灰度投影的特征量提取算法、基于边缘提取与轮廓跟踪的特征量提取算法、基于种子填充的特征量提取算法。
3.1 基于灰度投影的特征量提取算法
经过图像平滑处理和阈值分割后,得到的二值图像中主要存在车体和灌木丛干扰。在处理区域内,设定两个计数器。分别沿着水平方向和垂直方向扫描图像,每当像素点的灰度值为255时,计数器自加1。每当进入新的行或列之前,计数器自动清零,然后继续对新的行或列里的黑色像素点个数进行累加。由此统计出每行和每列的黑色像素点(目标或干扰物)个数,分别向X轴和Y轴投影
这个过程中得到的车体外接矩形并不够精确,为了得到更精确的外接矩形,还要排除干扰物,对区域进行优化。此处的干扰物主要是灌木丛,要优化的区域是车体的外接矩形。在用灰度投影法确定的车体的外接矩形中,再次利用“灰度投影”的原理,按照先X方向,后Y方向的步骤进一步优化得到一个更精确的区域,使得此区域能完全包含车体的目标像素,并且没有其他干扰。效果如图5所示。
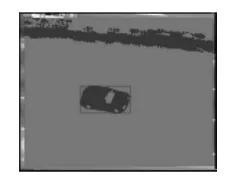
图5 带有趋于优化的灰度投影算法效果图
可以看出此时的区域是车体较为精确外接矩形,统计此时的区域长度和宽度值,进而计算得到面积、长宽比,即可作为目标的特征量,作为目标识别的依据。
3.2 基于边缘提取与轮廓跟踪的特征量提取算法
边缘蕴含了丰富的内在信息(如方向,阶跃性质,形状等),是图像识别中重要的图像特征之一。边缘提取首先检测出图像局部特征的不连续性,然后再将这些不连续的边缘像素连接成完备的边界。边缘的特征是沿着边缘走向的像素变化平缓,而垂直于边缘走向的像素变化剧烈。所以从这个意义上说,提取边缘的算法就是检测出符合边缘特征的边缘像素的数学算子。图6和图7分别是利用边缘提取和轮廓跟踪所得的效果图。
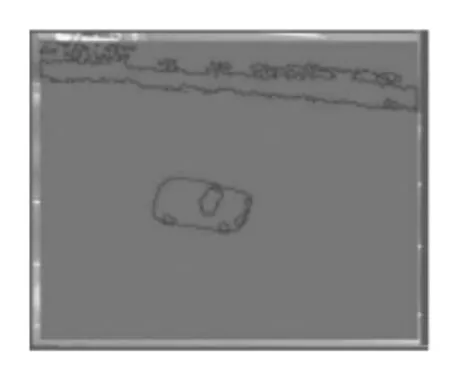
图6 边缘提取效果图

图7 轮廓跟踪效果图

图8 漫水法种子填充效果图

表1 6帧图像特征量的比较

表2 各组图片特征量统计数据表
3.3 基于种子
填充的量提取算法:
种子填充算法用来在封闭曲线形成的环中填充某种颜色,在这里我们只填充黑色。本文采用漫水法种子填充算法。具体方法是:首先初始化一个堆栈,并以图像的中心点作为种子,先将要填充的点压进堆栈中,此后每弹出一个点,将该点涂成黑色,然后按左上右下的顺序一次填充,直到堆栈为空。此时,区域内所有的点都被涂成了黑色,如图8所示。对被填充的车体内部像素点进行累加,便可以得到车的面积。
4. 小结
本文通过实验获取了采集图像中第1帧、第10帧、第20帧、第30帧、第40帧和第50帧,并利用灰度法对其进行了特征量提取,统计计算了特征量的变化范围、均值、方差、标准差以及综合偏差进行了统计计算。统计结果见表1和表2。可见,利用灰度投影法得到的目标外接矩形的长度、宽度和面积在各组图片中的变化量都很小。这是因为车体在运动过程中旋转的角度不是很大。可见灰度投影法比较适合于提取旋转角度较小、平移较大的目标的特征量。
[1]张贝.基于特征提取与灰度投影联合稳像的算法研究[硕士学位论文].哈尔滨.哈尔滨工程大学,2014年.
[2]吴凤和.基于计算机视觉测量技术的图像轮廓提取方法研究.计量学报,第28卷, 第1期,2012年.
[3]吴潜,居太亮,姚伯威.应用种子填充算法提取图像的形状特征.电讯技术,2007年第4期.
[4]孙丰荣,刘积仁.快速霍夫变换算法.计算机学报,第24卷,第10期,2011年.
[5]闫娟.数字图像的平滑处理方法研究.软件导刊,第8卷,第1期,2015年.
冯清娟(1978-),女,山西运城人,北京信息科技大学副教授,博士,研究方向:计算机视觉、人机交互。
本成果受北京市教委科技计划面上项目资助(KM201611232023);本成果受北京信息科技大学“勤信人才”培育计划资助。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
大众文艺(2021年15期)2021-08-25
高技术通讯(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
流行色(2020年2期)2020-04-28
流行色(2019年11期)2020-01-09
流行色(2019年11期)2020-01-09
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05