球形机器人的仿真与实验测试分析
2017-09-15 06:09肖起阳黄新敬曾周末
制造业自动化 2017年8期
杨 伟,李 健,肖起阳,黄新敬,曾周末
(天津大学 精密仪器与光电子工程学院,天津 300073)
球形机器人的仿真与实验测试分析
杨 伟,李 健,肖起阳,黄新敬,曾周末
(天津大学 精密仪器与光电子工程学院,天津 300073)
针对双摆驱动结构的动力学模型过于复杂的问题,提出一种以丝杠螺母调节转向、双摆驱动滚动的球形机器人结构。首先,对其机械结构做了分析与说明;其次,应用动力学分析爬坡性能,通过牛顿-欧拉法建立转向动力学模型,利用拉格朗日方程建立弹跳动力学模型;最后,围绕爬坡、弹跳与转向分别展开仿真与实验。仿真和实验的结果验证了机械结构的可行性与动力学分析的准确性,动力学模型有效简化。
球形机器人;动力学模型;牛顿-欧拉法;拉格朗日方程
0 引言
球形机器人是一种新颖、灵活且环境适应能力强的移动机器人,在军事、工业生产、仪器仪表以及办公室巡逻等领域均具有广阔的应用前景[1,2]。研究表明内驱单元是球形机器人的核心组成部分,决定了球形机器人的性能[3]。近十余年来,国内外研究机构已相继研制出多种不同结构特点的球形机器人。按内驱单元的结构特点,较具代表性的内驱单元有滚轮驱动[4]、辐式配重驱动[5]、单摆驱动[6]和双摆驱动[7]。既往研究虽取得了一定成果,然而在爬坡、弹跳、转向和可控性等方面存在诸多性能缺陷,制约了球形机器人的发展与应用。为此,开展球形机器人内驱单元结构的设计研究具有重要的意义。
内驱单元通过改变球形机器人的平衡位置,以驱动系统运动[3]。在Bouguechal等人[4]的滚轮内驱单元中,用电机带动滚轮沿球壳内壁滚动以改变系统质心位置,滚轮与球壳内壁间易打滑,爬坡能力低,不具备弹跳功能。在Mojabi等人[5]的辐式配重内驱单元中,用电机带动配重块沿呈辐射状分布的金属杆移动以改变系统的质心位置,多个配重块的位置控制过于繁杂,爬坡、转向性能低下,不具备弹跳功能。在孙汉旭等人[6]的单摆内驱单元中,用电机带动摆锤转动以改变系统的质心位置,爬坡能力强,但无法转向与弹跳。为改善球形机器人在爬坡、弹跳和转向方面存在的性能缺陷,Mahboubi等人[7]提出一种双摆内驱单元的球形机器人,较其它类型的球形机器人,双摆驱动的球形机器人爬坡、弹跳和转向性能均得到明显改善。然而,由于滚动与转向间存在复杂的驱动耦合关系,建模过程繁琐,动力学模型复杂,难以实现有效控制。为此,本文在双摆式内驱单元结构中,添加丝杠螺母作为转向调节机构,从而分离滚动与转向间的驱动耦合关系,以有效简化动力学模型,提高系统可控性。首先,对机械机构以及内驱单元的驱动原理做分析与介绍;其次,分别建立爬坡、转向和弹跳的动力学模型;最后,加工制作1套实验样机,并进行相应的实验和仿真验证,得出仿真和实验结果。
1 机械结构
如图1所示,本文提出的球形机器人由三部分构成:球形壳体、搭载平台和内驱单元。内驱单元由3台步进电机、2个摆锤和1套丝杠螺母装置构成,3台步进电机的中轴线与丝杠螺母的中轴线共线,构成机器人的长轴。壳体两侧的步进电机用以驱动摆锤绕长轴旋转,构成双摆结构;与丝杠铆接的步进电机用于驱动螺母沿丝杠移动,使系统质心位置沿长轴移动,从而调整机器人长轴与水平面间的夹角,以辅助调节系统转向。3块沿圆周分布的平板固定于壳体内部,以安装电路板。球形壳体向外凸出的鳍状结构,一方面,扩大壳体内部空间;另一方面,在转向过程中,限制长轴与水平面间的最大倾斜角度,提高转向运动稳定性。
2 动力学分析
2.1 爬坡能力
设球形机器人沿坡度为θ的斜面以无滑滚动的方式作爬坡运动。摆锤质量为m(kg),质心与壳体几何中心通过长度为l(m)的轻杆固连;除摆锤外的剩余部分近似等效为质量为M(kg),半径为R(m)的均质薄壁球壳;当前时刻,摆锤的偏转角为φ(rad),如图2所示。
根据文献[8],由动力学分析可得,球形机器人的爬坡条件为:
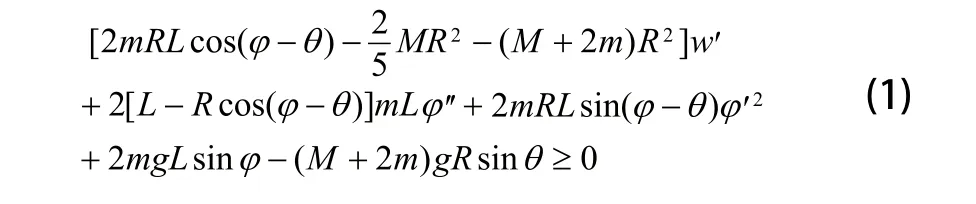

图1 三维机械结构
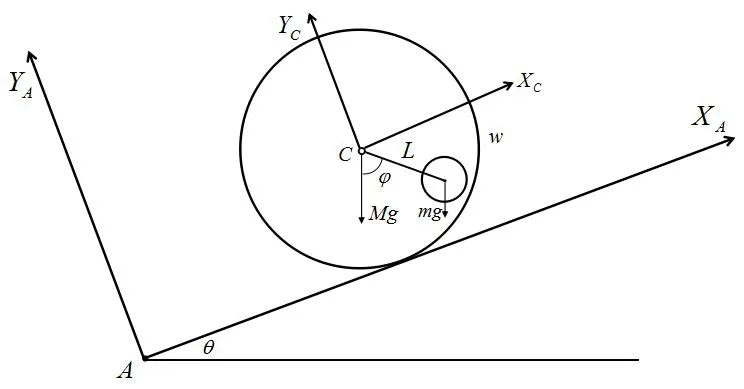
图2 球形机器人爬坡示意图
2.2 转向运动
如图4所示,球形机器人在水平面上以无滑滚动的方式作转向运动。设球形机器人长轴与水平面间夹角为β(rad),壳体半径为R,运动过程中所受摩擦力为f(N);螺母质量为m0(kg)质心为O,与壳体几何中心间的距离为d(m);两侧摆锤质量均为m,质心分别为P和Q,质心间矩离为2l,摆臂长度均为L;设转弯半径为r,如图3所示。

图3 转向运动示意图

2.3 弹跳运动
设球形机器人由水平面弹跳跃起,跃起高度为h(m);摆锤质量为m(kg),除摆锤外的剩余部分近似等效为质量为M(kg)的均质薄壁球壳;当前时刻,两侧摆锤与短轴间夹角均为α(rad),转速大小相等,方向相反,摆臂长度均为L,如图4所示。
由第二类拉格朗日方程[10],可求得球形机器人弹跳运动的动力学模型为:应用牛顿-欧拉法[7,9],建立球形机器人转向运动的动力学模型为:


图4 弹跳运动示意图
3 实验与仿真
3.1 爬坡性能测试实验
设置斜面坡度为5°、10°、15°、20°和25°,对球形机器人实验样机的爬坡性能进行实验测试,实验结果如表1所示。
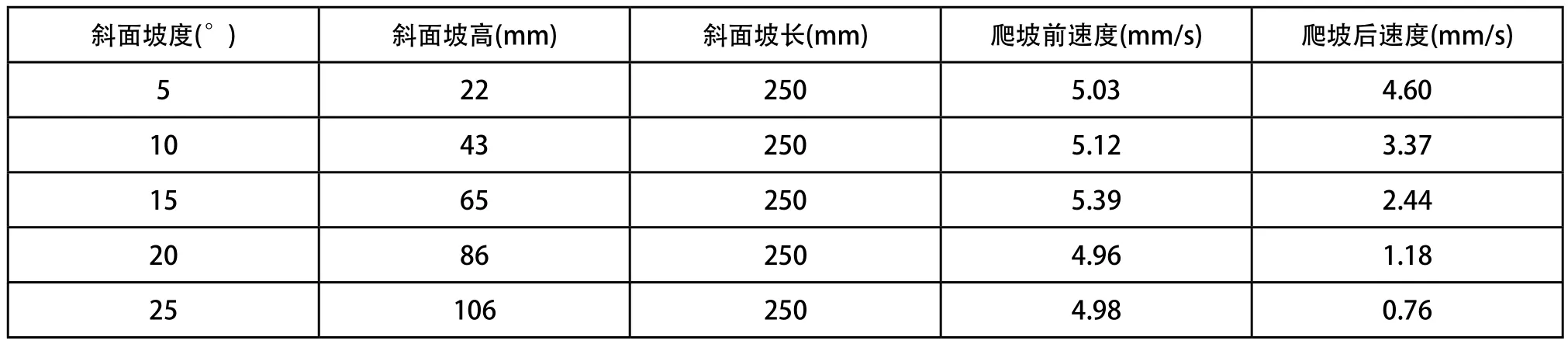
表1 爬坡测试实验结果
由爬坡测试实验数据可得,球形机器人在以5mm/s速度缓慢运动过程中,可爬越倾斜角度为25°的斜坡障碍物,由此可见,球形机器人的爬坡越障能力较强。
3.2 转向性能仿真与实验
根据文献[11],为验证动力学方程式(2),应用MATLAB求解方程解,计算球形机器人的最小转向轨迹,应用ADAMS机械系统仿真软件仿真球形机器人的最小转向轨迹,利用球形机器人实验样机对最小转向轨迹做实验测试。在MATLAB计算、ADAMS仿真过程中,所用到的主要相关参数如表2中所列。在ADAMS仿真过程中,为保证仿真结果较为准确,将在Solidworks软件中设计的球形机器人三维机械结构导入,以建立完整的虚拟物理模型(图5)[12]。转向实验过程中,使用固定于球形机器人正上方的高速像机对转向过程连续拍摄,根据获取的图像数据帧(图6),绘制出实验过程中球形机器人的最小转向轨迹。
图7为球形机器人最小转向轨迹的理论计算结果、ADAMS仿真结果以及实验测试结果。MATLAB求解出的最小转向轨迹理论值为圆周轨迹,半径约为130mm。ADAMS仿真得出的最小转向轨迹、实验测试得出的最小转向轨迹,均与理论轨迹较为接近,因此,可验证动力学方程(2)式准确可靠。
表2 主要相关参数

图5 在ADAMS中建立的虚拟物理模型
图6 转向测试实验图
图7 最小转向轨迹图
3.3 弹跳性能仿真与实验
[12],为验证动力学方程(3)式,应用MATLAB求解方程解,计算球形机器人的弹跳高度理论值,应用ADAMS机械系统仿真软件仿真球形机器人的弹跳高度,利用球形机器人实验样机进行弹跳实验测试。已知球形机器人的总质量为0.462kg,其余主要相关参数参考表2。转向实验过程中,使用固定于球形机器人正前方的高速像机对弹跳过程连续拍摄,重复实验5次,根据获取的图像数据帧(图8),得出每次实验过程中球形机器人的弹跳高度值,弹跳实验结果如表3所示。
表3 弹跳实验结果

图8 弹跳性能实验测试图
图9为球形机器人弹跳高度的理论计算结果以及ADAMS仿真结果,MATLAB求解出弹跳高度理论值约为275mm,ADAMS得出的弹跳高度仿真值约240mm。弹跳实验重复进行5次,实验样机的弹跳高度最小值为209mm,最大值为240mm,平均值为223mm。较理论值,弹跳高度的仿真值降低12.7%,实验平均值降低18.9%。由此可见,弹跳高度的理论值、仿真值和实验值间的误差波动较小,动力学方程(3)式较为准确可靠,球形机器人可弹跳越过高度约200mm的障碍阻挡,具有较强的弹跳越障能力。

图9 弹跳运动的理论与仿真曲线
4 结论
本文对双摆驱动结构做改进,为分离滚动和转向间的驱动耦合关系,加入丝杠螺母作为转向调节机构。动力学分析表明,对比文献[7]提出的双摆式驱动的球形机器人,本文提出的球形机器人结构,动力学模型简化,可控性提高。爬坡性能测试实验结果表明,球形机器人的爬坡越障能力较强,缓速滚动过程中,可越过倾斜角度低于25°的倾斜障碍物;转向仿真与实验结果表明,转向性能稳定、良好,最小转向半径为130mm,运动过程中规避障碍物的能力较强;弹跳仿真与实验结果表明,球形机器人可弹跳越过高度约为200mm的阻隔障碍物。因此,本文提出的球形机器人结构具有可行性,爬坡越障、转向规避障碍以及弹跳越障的能力较强,动力学模型有效简化,可控性提高,可应用于在复杂地形环境中行走,以完成相关的测量或探索任务等,这为进一步开展球形机器人智能导航控制的研究工作奠定了基础。
参考文献:
[1] 赵勃,孙立宁,李满天.球形机器人研究综述[J].机械与电子,2010,2010(9):63-68.
[2] 孙汉旭.新型变结构球形机器人运动分析[J].机械工程学报,2013,49(19):40-47.
[3] 邓宗全,岳明,禹鑫燚,方海涛. 球形运动器动力学分析及控制系统设计[J].机器人,2006,28(6):565-570.
[4] Nour Eddine Bouguechal. Positioning errors consideration for indoor mobile robot design[J].Industrial Robot,2003,30(2):170-176.
[5] Mojabi P. Introducing August: a novel strategy for an omnidirectional spherical rolling robot[C]//Robotics and Automation, 2002. Proceedings. ICRA'02. IEEE International Conference on. IEEE, 2002, 4: 3527-3533.
[6] 兰晓娟,孙汉旭,贾庆轩.水下球形机器人BYSQ-2的原理与动力学分析[J].北京邮电大学学报,2010,33(3):20-23.
[7] Saber Mahboubi. Design and implementation of a novel spherical mobile robot[J].Journal of Intelligent and Robotic Systems,2013,71(1):43-64.
[8] 王亮清,孙汉旭,贾庆轩.球形机器人的爬坡与弹跳能力[J].北京邮电大学学报,2007,29(2):11-14.
[9] Chen M, Sun W, Gao Y, et al. Development of a holonomic mobile spherical robot with 3D center of gravity shifting actuators[C]//Robotics and Biomimetics (ROBIO), 2016 IEEE International Conference on.IEEE,2016:438-442.
[10] 刘隆,谢伟平.含多余广义坐标的拉格朗日方程及实例应用[J].力学与实践,2013,35(3):87-89.
[11] 方琛玮,庄未,刘晓平,孙汉旭.基于ADAMS的球形机器人的运动学分析[J].机械工程与自动化,2009,(1):118-120.
[12] Zhao W, Sun H X, Jia Q X, et al. Mechanical Analysis of the Jumping Motion of a Spherical Robot[C]//Advanced Materials Research. Trans Tech Publications, 2012, 591: 1457-1460.
The simulation and experimental analysis of a spherical robot
YANG Wei, LI Jian, XIAO Qi-yang, HUANG Xin-jing, ZENG Zhou-mo
TP242
:A
:1009-0134(2017)08-0029-04
2017-06-10
国家自然科学基金资助项目(61374219,51604192)作者简介:杨伟(19 -),
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
发明与创新(2022年24期)2022-06-14
发明与创新·小学生(2022年8期)2022-06-13
黑龙江大学自然科学学报(2022年1期)2022-03-29
当代陕西(2021年13期)2021-08-06
动漫界·幼教365(中班)(2021年6期)2021-07-21
当代工人(2020年1期)2020-05-11
汽车实用技术(2019年18期)2019-09-26
火炸药学报(2014年1期)2014-03-20