
环境感知自动巡航无人车设计
2017-09-28 11:36赵甜甜陈万培顾益飞
无线电工程 2017年10期
赵甜甜,陈万培,顾益飞,张 雷,周 磊
(扬州大学 信息工程学院,江苏 扬州225127)
环境感知自动巡航无人车设计
赵甜甜,陈万培,顾益飞,张 雷,周 磊
(扬州大学 信息工程学院,江苏 扬州225127)
针对自然保护区的生态监测问题,以弥补无人机监控空白与提高监测数据多样性为目标,设计了自动巡航机器人。机器人采用百度地图规划作业路径,巡航依赖惯性导航,并且支持地图定位;设计侵入式雷达传感系统,通过ZigBee节点传输信息,以机器人为中继节点,传回移动监控端后,汇至云平台供用户查看;通过智能手套控制机械臂,实现对传感器节点的回收和放置;通过虚拟控制手柄远程控制摄像头,并将视频信息至移动终端。测试结果表明,系统各项测试可靠率均在90%以上,该系统可实现高效的环境检测和科学的环境管理。
野外环境;机器人;机械臂;惯性导航;虚拟现实
0 引言
随着工业发展,环境问题已严重影响社会的可持续发展,特别是长期以来粗放型经济增长方式,使环境遭到很大破坏,已经影响到人类健康。但是目前社会上的环境监测存在较多缺陷:① 监测设备大多依靠进口,且工作条件要求高,需安装于实验室,尤其不适应于生产现场、野外和边远地区等环境的应急监测;② 较多环境监测系统采用的是有线或有线加调制解调器或光纤等通讯方式,但是在环境监控系统中,很多监控点必须是野外、企业排污点等无人值守的搭建有线网络困难的环境;③ 环境监测领域的热点:基于无人机的环境监测系统,其对于复杂的野外环境的内部具体情况监测不够细致。针对上述问题,本文提出一种新的环境监测方式——基于环境感知自动巡航无人车。
无人车指的是能够在野外环境以及各种路面行驶并执行某些任务但车内没有操纵者的车辆[1]。其中自主车辆具有初步的人工智能,能够自主行驶、自动执行巡逻和监视等任务[2]。
目前无人车装备导航系统有GPS导航系统、北斗导航系统、惯性导航系统和GLONASS导航系统等[3]。其中GPS导航系统直接受控于美国国防部,不是自主式导航,使用权受制于人,并且信号易被遮挡,动态响应能力差,易受电子干扰[4]。现如今应用越来越广泛的捷联惯导系统具有完全自主、快速、动态性能好和短期精度高等优点。
随着传感器的发展,环境感知能够实现的功能也越来越丰富,包括障碍物检测、车辆行人检测[5]、道路跟踪[6]、路标识别[7]、同时定位与地图构建[8]等。而越来越多复杂场景下的自主导航要求也给环境感知问题带来了更大的挑战[9-10]。
综上,无人车可改变当前滞后的环境监测技术,解决环境监测遇到的困难和难题,并特有的无线化、智能化、集成化以及网络化属性,现已成为环境监测领域研究的热点。
1 系统总体设计
本机器人用于野外无人环境的巡航,以百度地图规划的线路为作业路径,通过惯性导航实现巡航,并实时传输自身定位信息至移动监控端以实现地图定位;设计侵入传感系统,通过ZigBee节点传输感知信息,以机器人为中继节点,传回移动监控端后,汇至云平台供用户查看;通过智能手套控制机器人,配合地图预置作业任务实现对传感器节点的回收和放置;在巡航时,可通过虚拟控制手柄远程控制摄像头,并传回视频信息至移动终端。系统结构如图1所示。
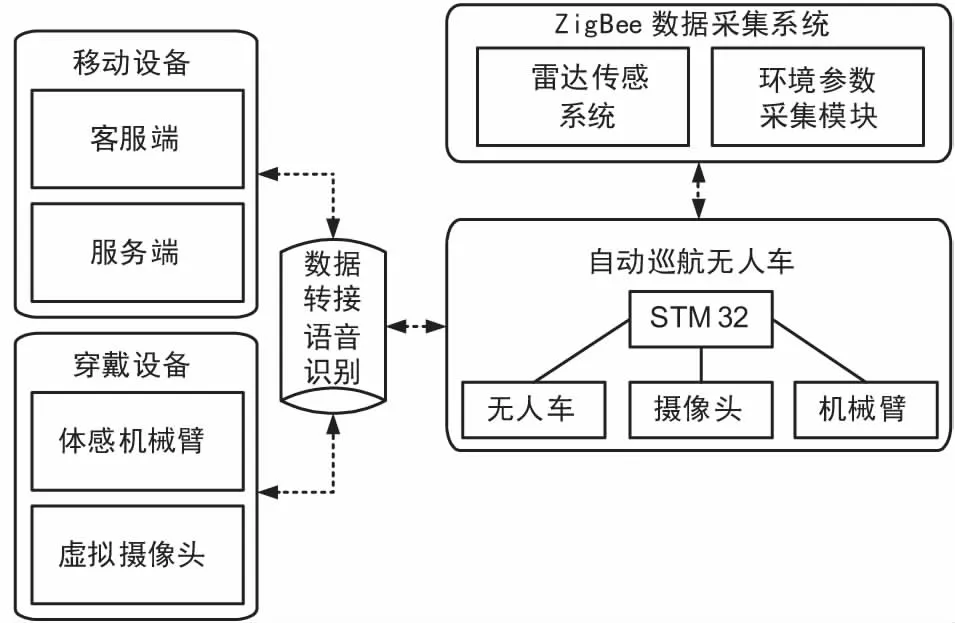
图1 系统结构
系统主要分为3部分:① 系统前端由ZigBee数据采集模块和雷达侵入传感器模块构成数据采集子系统;② 系统中端是自动巡航无人车;③ 系统后端是数据转接子系统、穿戴设备和终端设备。
2 硬件设计
2.1 环境参数采集子系统
环境参数采集子系统包括2个部分:雷达侵入传感系统和ZigBee数据采集模块。其中雷达侵入传感系统是以Micro Blaze为核心的片上系统(SoC),其核心控制单元为FPGA的Artix-7,步进电机通过GPIO接口与其连接,雷达模块和ZigBee节点均通过UART接口与其通信,可完成侵入信息的采集,面积功耗小于CPU实现的同类系统。ZigBee数据采集模块中温度、湿度,光照传感器与ZigBee终端节点通过GPIO口通信,采集所需的环境参数数据。
2.2 自动巡航机器人子系统
2.2.1 无人车模块
无人车模块包括坦克车模、MPU6050和光电传感器,其中主控板STM32借助脉冲宽度调制控制坦克车模,通过IIC接口与MPU6050,通过GPIO与光电传感器的信号输出线相连。
2.2.2 机器臂模块
机器臂模块采用STC12C5A作为核心控制板,主要用于处理体感机械臂的数据和控制实体六轴机械臂。核心控制板STC12C5A通过UART接口与主控板STM32通信,此外6个舵机分别与其舵机控制口相连。
2.2.3 摄像头模块
摄象头模块硬件设备有二自由度云台、CC3200和摄像头MT9D111,其中主控板STM32通过GPIO接口控制二自由度云台,摄像头MT9D111与CC3200置于云台之上,且通过IIC和并行接口与CC3200通信,完成可调拍摄方向的视频监控功能。
2.3 数据转接子系统
数据转接子系统包括3部分:语音模块、蓝牙数据传输模块和2401数据传输模块。其中蓝牙数据传输模块用于实现本子系统和穿戴设备与终端设备之间的数据传输功能,2401数据传输模块用于实现与自动巡航机器人子系统之间的数据传输功能。语音模块用于实现语音识别、控制和人机交互的功能。
2.4 穿戴设备
2.4.1 智能手套
智能手套硬件包括2个MPU6050和1个航姿参考系统(AHRS),主要用于捕捉操作者手臂真实的运动状态。2个MPU6050通过IIC接口与穿戴设备的主控板STM32相连,并分别固定于指尖处和手腕处;航姿参考系统(AHRS)通过UART接口与穿戴设备的主控板STM32通信,并固定于手臂处。
航姿参考系统(AHRS)是一种主要采用惯性传感器以数据融和算法精确测量空间姿态的传感系统,一般由相互正交的三轴陀螺仪、三轴加速度计以及三轴磁强计组成,其可通过算法估算出捷联物体在重力场方向以及地磁场水平分量方向构成的坐标系下的三维姿态[11-14],广泛应用于航空航天[15]、机器人[16-17]以及生物运动分析[18]。
2.4.2 虚拟控制手柄
虚拟控制手柄包括一个航姿参考系统(AHRS),通过IIC接口与穿戴设备的主控板STM32相连,经过主控板处理后,发送至自动巡航机器人子系统,控制摄像头的拍摄方向。
3 关键软件设计
系统软件包括5部分:ZigBee数据采集、自动巡航机器人、数据转接、穿戴设备软件与终端设备软件,其中ZigBee数据采集、自动巡航机器人、数据转接和穿戴设备软件采用C语言开发,终端设备软件采用Java和C#开发。
3.1 语音模块
语音模块的主要用途为语音识别、语音指令与人与机器的友好交流。工作流程:模块初始化,包括延时函数初始化、串口初始化以及内部内存池初始化;紧接着检测是否有SD卡,若有,则为文件系统的相关变量申请内存,否则继续检测;然后挂载SD卡,最后,转至LD3320的执行函数。
在LD3320执行函数的具体设计过程中,采用状态机方式实现,其状态机如图2所示。

图2 LD3320工作流程
首先,开始一次自动语音识别过程(包括自动语音识别的初始化,自动语音识别增添关键字和开始自动语音识别的运算),等待自动语音识别过程结束后,若存在语音识别的结果,则读取该结果;否则转到初始化状态,重复一次上述操作。
在取自动语音识别结果的过程中,支持对结果执行相关的Mp3语音播放操作,其工作流程如图3所示。

图3 ASR取识别结果工作流程
3.2 无人车
无人车支持路径规划和遥控2种控制方式。无人车的作业路线依赖百度地图在线规划,然后借助惯性导航系统,完成自动巡航的功能,并实时传输自身定位信息至移动监控端以实现无人车在地图界面的定位和3D虚拟场景漫游。
通常惯性导航利用惯性器件测量角速度和加速度信息,然后使用牛顿运动定律计算载体时速度和位置,而且可以连续提供载体位置、线速度、角速度和姿态角等参数,因此惯导具备不依赖外界信息、不向外界辐射能量、不受干扰和隐蔽性好的优点,这是无线电定位技术和卫星定位技术等技术无法达到的,在战场等无线信号微弱的恶劣环境都有较大的应用价值。
在本模块中,MPU6050提供无人车导航所需的加速度值和角度信息,其被直接安装在无人车上,因此无人车的导航方式为捷联式惯导系统。
因为制作技术不足和嘈杂环境干扰,传感器一般需要进行数据融合来减小误差[19]。车体震动会影响加速度计,而由于车体运动产生的噪声会随着运动速率的增加而增大,因此长时间工作对加速度测量的影响更大。陀螺仪属于测量旋转运动的磁通传感器,其输出数据呈现明显的非线性特质[20],输出值是围绕某个轴向的旋转角速率,其可通过角速率对时间积分得到角度值,所以受到积累漂移误差影响,不便于单独地较长时间的工作[21]。
自动巡航机器人运用了采用AHRS的惯性导航系统算法,其可依据观测数据,自适应修正信号的噪声,与卡尔曼滤波相辅相成,提高系统的稳定性和鲁棒性。
采用四元数表示b系~n系的坐标变换矩阵:
在东北天坐标系中,采用欧拉角的形式表示b系~n系的坐标变换矩阵:

MARG(Magnetic,Angular,Rate,Gravity)算法:在静态情况下,通过采集加速度计和磁力计的测量数据来得到载体的绝对姿态。




在每一个卡尔曼滤波周期中,包括状态预测、状态估计和增益矩阵、误差自相关矩阵计算流程。卡尔曼滤波的详细操作如下:
步骤1:状态向量x(^)0|0以及误差自相关矩阵P0初始化;
步骤2: 由观测信号z(n)计算新息过程,αn=zn-Cnx(^)n|n-1;
步骤3:一步预测误差自相关矩阵,Pn|n-1=Fn|n-1Pn-1Fn|n-1+Wn-1;
步骤6:状态估计,x(^)n=x(^)n|n-1+Knαn;
步骤7:状态估计误差自相关矩阵,Pn=[1-KnCn]Pn|n-1。
在卡尔曼滤波过程中,αK定义为残差向量,其可表征滤波模型的准确度。
按照卡尔曼滤波的原理,本系统在此基础上提出了适用于自身的卡尔曼滤波器。自适应滤波的工作原理:经过残差的测量方程和理论方差两者比值的监测,实时估计测量方差。当模型准确时,比值应在1附近;在检测到噪声改变的情况下,两者比值偏离1,系统此时需修正观测噪声。
航姿参考系统的观测向量——加速度和地磁信息,两者是完全独立。
残差向量的测量方差CK为:
理论方差SK为:
式中,CA为加速度信息的测量方程;SA为理论方差;加速度信息与地磁信息的测量协方差为CAM、CMA,理论协方差为SAM、SMA;CM、SM为地磁信息的测量方差和理论方差。
4 系统测试分析
4.1 语音识别测试
本系统加入了语音模块,其主要功能为语音识别、语音指令和人机的友好交流。在实验室测试阶段,选择多个不同音色的人在实验室环境下分别进行测试,对识别率进行了多达700多次的测试和统计。部分非特定人的语音命令测试的正确识别数据比例如表1所示。
通过最后的稳定性测试和统计,语音识别成功率可高达90.69%,达到了预期的功能性目的的同时,也达到了稳定性的要求。本语音识别部分性能良好,成本低廉,且便于在未来继续完善并拓展其功能,将具有广阔的应用前景。
表1 语音命令测试的正确识别数据表
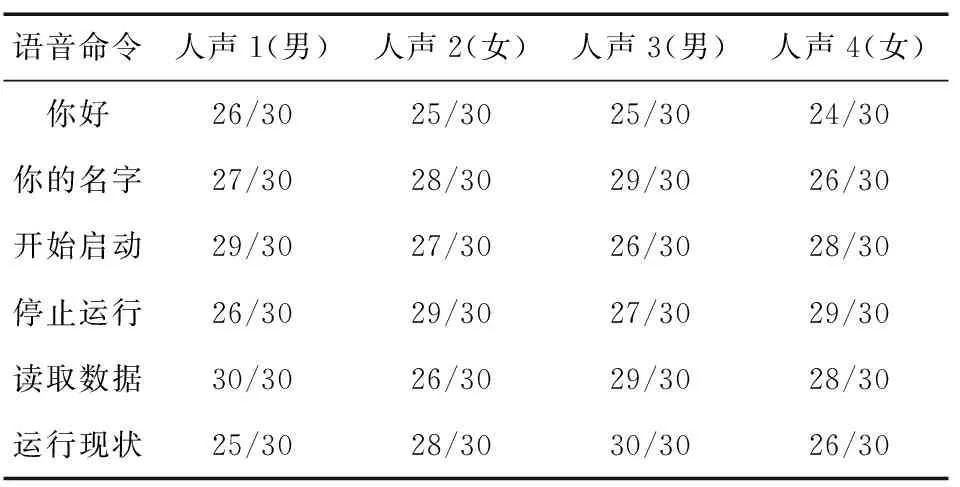
语音命令人声1(男)人声2(女)人声3(男)人声4(女)你好26/3025/3025/3024/30你的名字27/3028/3029/3026/30开始启动29/3027/3026/3028/30停止运行26/3029/3027/3029/30读取数据30/3026/3029/3028/30运行现状25/3028/3030/3026/30
4.2 通信距离测试
无人车与固定基站之间有效的通信距离,是衡量本系统性能好坏的重要标志之一。
4.2.1 无人车数据发送至手机端的测试方案
无人车每个1S向手机端发送固定长度的测试包,数据包的数量为1 000个,手机端计算接收到测试包的数量,计算通信丢包率,其测试结果如表2所示。
表2 通信距离及丢包率测试

通信距离/m室内丢包率/%室外丢包率/%100002005050010110002021500303200058625009010
4.2.2 手机端指令发送至无人车的测试方案
在空旷环境下,手机端与无人车相距1 000 m。手机端向无人车发送控制指令,控制指令总数为100个,观察无人车的状态,记录无人车识别指令的次数,其测试结果如表3所示。
表3 控制命令测试的正确识别数据表

控制命令正确次数正确率/%视频信息9898汽车定位9797规划路径9999开始形式9999轨迹显示9999侵入信息9898环境信息9999摄像头控制9898机械臂控制9797
综合上述测试结果可知,基于虚拟体验的环境感知无人数据传输的可靠性较高,其中室内传输距离较短,但是野外空旷环境基本上可以支持1 500 m左右的有效传输距离,而且无人车对控制命令识别的正确率也较高,达到了预期的功能性目的的同时,也达到了稳定性的要求。
4.3 惯性导航
在本系统中,惯性导航是为无人车读取底层数据采集节点服务。由于ZigBee之间的通信距离大概在100 m之内,因此无人车仅需进入读取的有效距离便可读取数据,完成系统预设的作业任务;另外,系统中无人车可借助自带的机械臂完成传感器节点的回收和放置,除了依赖惯性导航外,还需要视频信息和遥控方式的配合。无人车执行读取数据任务时,其路径的导航状况如图4所示。其中各节点周围的虚线圆形为ZigBee的有效传输范围,虚线为百度地图规划的线路,实线部分是无人车真实的巡航路线。
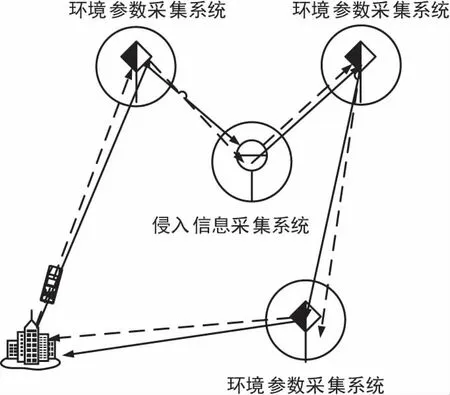
图4 无人车巡航状况示意
综合上述情况,惯性导航的测试可以转换为无人车在巡航过程中,在作业任务布置所需要收集数据的节点数中,无人车实际正确地收集的节点数据数,其测试统计结果如表4所示。
表4 巡航过程测试数据记录表
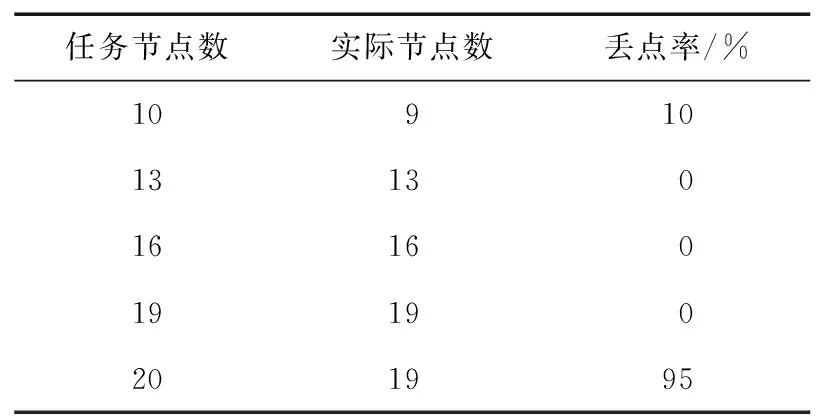
任务节点数实际节点数丢点率/%10910131301616019190201995
5 结束语
随着科学技术的不断发展,环境监测设施已经逐步进入人们的视线,并开始广泛运用于各类复杂环境的监测。但目前环境监测设备依赖进口,价格昂贵,工作环境苛刻,依赖有线网络。无人机虽能在一定程度上解决上述问题,但是内部具体情况监测不够细致。以自动巡航机器人为依托,依托各类技术的配合,该机器人能够准确做到对环境各项数据和区域侵入情况的实时监测,并能够将监测结果反馈给终端设备并传输至云平台。与无人机相互配合,可改变当前滞后的环境监测技术,解决环境监测中遇到的困难和难题。
[1] 岳松堂,张志杰.外军无人地面车辆发展分析[J].现代军事,2007(11):53-56.
[2] 杜颖,丁昆.美军无人地面车辆概述(三)[J].国防技术基础,2008(4):49-50
[3] 程鹏飞,蔡艳辉,文汉江,等.全球卫星导航系统 GPS,GLONASS,Galileo 及其他系统[M].北京:测绘出版社,2009.
[4] 刘基余.全球定位原理及其应用[M].北京:测绘出版社,1993.
[5] CHENG J,XIANG Z,CAO T,et al.Robust Vehicle Detection Using 3D Lidar under Complex Urban Environment[C]∥IEEE International Conference on Robotics & Automation,2014:691-696.
[6] ALVAREZ J M,GEVERS T,DIEGO F,et al.Road Geometry Classification by Adaptive Shape Models[J].Intelligent Transportation Systems IEEE Transactions on,2013,14(1):459-468.
[7] CHEN L,LI Q,LI M,et al.Traffic Sign Detection and Recognition for Intelligent Vehicle[C]∥Intelligent Vehicles Symposium(IV),2011:908-913.
[8] LEONARD J J,DURRANT-WHYTE H F.Simultaneous Map Building and Localization for an Autonomous Mobile Robot[C]∥IEEE/RSJ International Workshop on Intelligent Robots & Systems,1991:1442-1447.
[9] LUETTEL T,HIMMELSBACH M,WUENSCHE H J.Autonomous Ground Vehicles—Concepts and a Path to the Future[J].Proceedings of the IEEE,2012,100(5):1831-1839.
[10] LEVINSON J,ASKELAND J,BECKER J,et al.Towards Fully Autonomous Driving:Systems and Algorithms[J].Intelligent Vehicles Symposium,1931,32(14):163-168.
[11] 李翔,李智.航姿参考系统三轴磁强计校正的点积不变法[J].仪器仪表学报,2012,33(8):1813-1818.
[12] 张利,秦海春,王文彬,等.超声波与航迹推算融合的智能轮椅定位方法[J].电子测量与仪器学报,2014,28(1):62-68.
[13] 秦国庆,赖际舟,陈驵,等.捷联航姿系统加速度计振动噪声平滑技术[J].电子测量技术,2013(4):87-91.
[14] 周胜明,徐庆九,曲东才.航向姿态系统综合检测仪[J].国外电子测量技术,2006,25(2):20-22.
[15] EUSTON M,COOTE P,MAHONY R,et al.A complementary Filter for Attitude Estimation of a Fixed-wing UAV[C]∥Ieee/rsj International Conference on Intelligent Robots and Systems.IEEE,2008:340-345.
[16] GUPTA G S,BARLOW P,DAVID S.Review of Sensors and Sensor Integration for the Control of a Humanoid Robot[C]∥Conference Record-ieee Instrumentation & Measurement Technology Conference.IEEE,2011:1-5.
[17] YI S J,ZHANG B T,HONG D,et al.Learning Full Body Push Recovery Control for Small Humanoid Robots[J].IEEE International Conference on Robotics and Automation,2011,19(6):2047-2052.
[18] KIM S K,HONG S,KIM D.A Walking Motion Imitation Framework of a Humanoid Robot by Human Walking Recognition from IMU Motion Data[C]∥Ieee-Ras International Conference on Humanoid Robots,2010:343-348.
[19] DONG W,LIM K Y,GOH Y K,et al.A Low-cost Motion Tracker and Its Error Analysis[C]∥IEEE International Conference on Robotics & Automation,2008:311-316.
[20] 刘艳霞,李希胜,冯毅博,等.三轴磁罗盘标定位置分布的研究[J].仪器仪表学报,2013,34(3):684-690.
[21] 郜园园,阮晓钢,宋洪军,等.两轮自平衡机器人惯性传感器滤波问题的研究[J].传感技术学报,2010,23(5):696-700.
DesignofAutomaticCruiseUnmannedGroundVehicleBasedonEnvironmentalPerception
ZHAO Tian-tian,CHEN Wan-pei,GU Yi-fei,ZHANG Lei,ZHOU Lei
(InstituteofInformationEngineering,YangzhouUniversity,YangzhouJiangsu225127,China)
Aiming at the problem of ecological monitoring in nature reserves,an automatic cruise robot is designed to make up the blanks of UAVs and improve the diversity of monitoring data.The robot based on inertial navigation uses Baidu map to plan the job path.And it supports map positioning.This project designs an intrusion sensing system that transmits information through a ZigBee node.The robot can serve as a relay node.After reaching back to the mobile monitoring side,the data is converged to the cloud platform for users to view.The operator controls robot arm through the smart glove in order to meet the map preset task to achieve the sensor node recovery and placement.The operator controls camera remotely through the virtual control handle and the camera will send video information to the mobile terminal.In addition,the robot also supports voice recognition,control and human-computer interaction.After testing,the system helps to grasp the characteristics of the field environment in real time.Test results show that the reliability of the system test are more than 90%,the system can achieve efficient environmental testing and scientific environmental management.
wild environment;robot;mechanical arm;inertial navigation;virtual reality
10.3969/j.issn.1003-3106.2017.10.16
赵甜甜,陈万培,顾益飞,等.环境感知自动巡航无人车设计[J].无线电工程,2017,47(10):73-78.[ZHAO Tiantian,CHEN Wanpei,GU Yifei,et al.Design of Automatic Cruise Unmanned Ground Vehicle Based on Environmental Perception[J].Radio Engineering,2017,47(10):73-78.]
TN919
A
1003-3106(2017)10-0073-06
2017-04-28
国家自然科学基金资助项目(61376025,61301111);江苏省高校自然科学基金资助项目(13KJB510039);扬州市自然科学青年基金资助项目(SQN20150035)。
赵甜甜女,(1994—),本科生。主要研究方向:电子信息工程。陈万培男,(1962—),副教授,硕士研究生导师。主要研究方向:信号处理与信息传输。
猜你喜欢
学生天地(2020年5期)2020-08-25
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
小说界(2018年5期)2018-11-26
小天使·一年级语数英综合(2017年3期)2017-04-25
岷峨诗稿(2017年4期)2017-04-20
莫愁(2017年9期)2017-04-07
