多段分支弹道的两级全局优化方法
2017-10-13 07:07龚春林朱政光谷良贤
宇航学报 2017年9期
龚春林,朱政光,陈 兵,粟 华,谷良贤
(西北工业大学航天学院陕西省空天飞行器设计重点实验室,西安 710072)
多段分支弹道的两级全局优化方法
龚春林,朱政光,陈 兵,粟 华,谷良贤
(西北工业大学航天学院陕西省空天飞行器设计重点实验室,西安 710072)
针对多段分支弹道设计存在的弹道交班点选取困难、交班控制变量突变等问题,提出一种两级全局优化方法。对各弹道段分别建立子级优化问题,采用系统级优化实现各段交班点耦合变量协调,以及最佳交班点求解;将交班点耦合变量中质量参数转为局部优化变量,其他状态参数转为系统级优化变量,实现了同层优化问题解耦;在子级优化问题中引入控制变量一阶导数作为优化变量,并作为系统级协调变量,保证各段控制变量光滑过渡。某两级重复使用运载器全程弹道优化算例表明,本文提出的方法能将高度耦合的全程弹道优化转化为简单有效的两级优化问题,可推广应用于其它各类多段分支弹道设计。
多段分支弹道;弹道优化;两级全局优化;交班点
0 引 言
弹道优化逐渐成为飞行器总体设计的主要工作手段之一,具有重要的理论研究意义和工程应用价值。某些飞行器由于组成和任务的复杂性,其弹道包含多段分支弹道。例如,两级入轨重复使用运载器的典型弹道如图1 (a)所示,包含上升段、返回再入段和入轨段,在两级分离点处有两条轨迹分支;带多个分导弹头的弹道导弹的典型弹道如图1 (b)所示,在分离时刻时,导弹释放多个弹头,各弹头飞行弹道即为不同分支弹道。这些弹道具有典型的多段分支特点,各段弹道设计目的各有不同,但又相互影响、相互耦合。在飞行器设计中,为了获得最佳的总体设计方案,需要同时优化分离条件及各段弹道,实现弹道的全局最优化。
由于各段弹道优化控制变量和目标均有可能不同,该类弹道优化一般为多目标优化问题,基于传统的最优控制理论或参数优化方法难以直接求解。同时,各段和各分支交班点之间高度耦合,在优化过程中实现交班点控制变量和状态变量的平滑连接进一步增加了问题的求解难度。
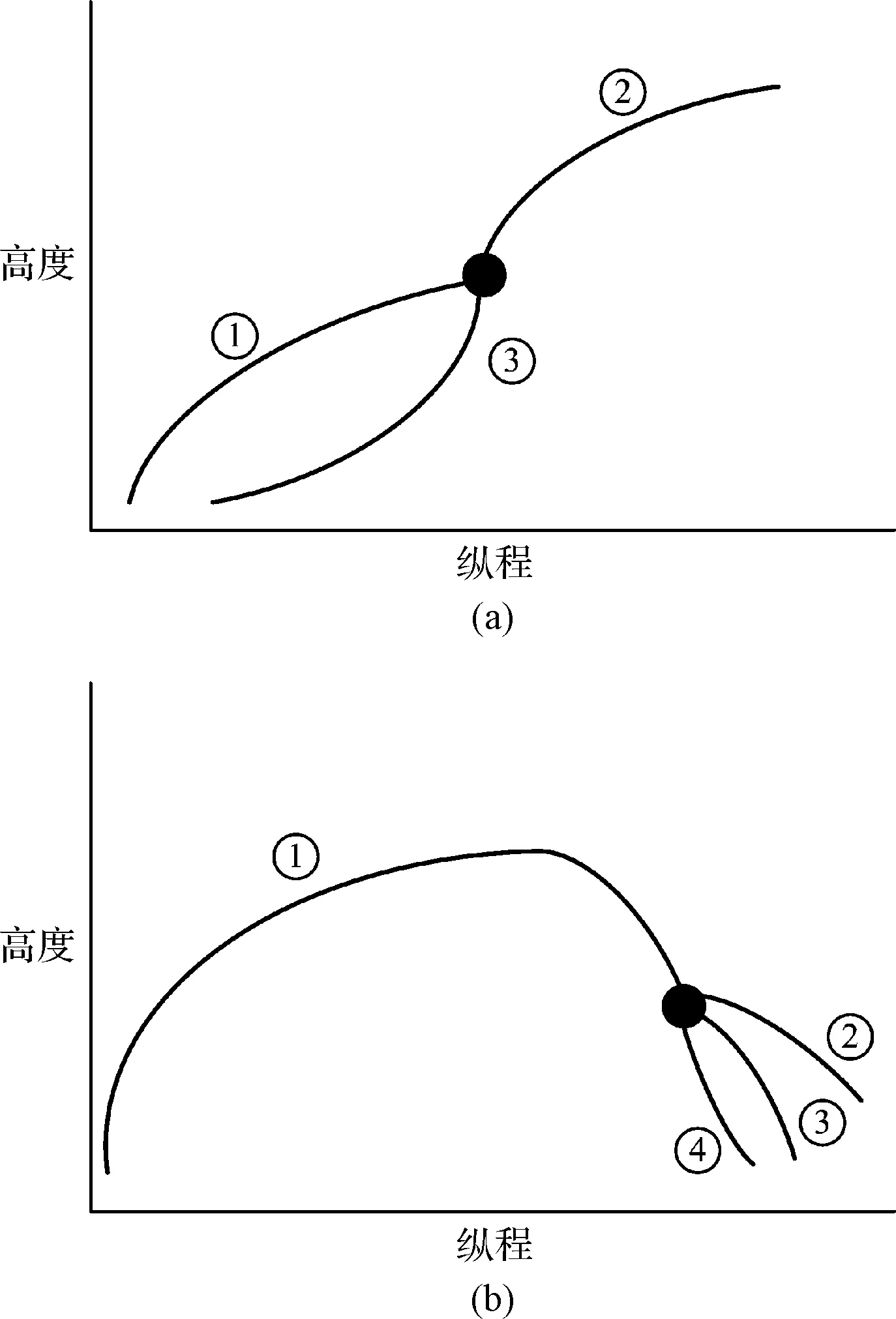
图1 多段分支弹道示意图Fig.1 The schematic diagram of the branching trajectory
针对多段分支弹道优化,国内外学者开展了部分研究工作。文献[1]采用POST和OTIS软件进行弹道优化,虽然支持串联的多段弹道优化,但不支持多分支弹道优化;文献[2]采用间接法,通过计算推导得到两级火箭最优控制问题中控制变量的解析函数,从而多级完成弹道优化,但其不存在多分支弹道形式;文献[3]对两级入轨运载系统全程分叉型弹道进行了优化,首先提出分叉型弹道的转接条件,然后优化三段独立的弹道优化问题,但并没能优化交班点条件,无法得到最佳的两级交班点。文献[3]解决了多级火箭弹道优化多分支等问题,但未考虑交班点控制变量大小对上面级弹道的影响;文献[4]采用参数优化方法研究了多级组合动力飞行器弹道优化问题,但未能解决弹道多段情况下控制变量突变情况;文献[5]以伪谱法为基础,引入连接条件模型,快速求解此类运载器最优弹道,可解决多段弹道优化问题,但并不能解决多分支弹道优化问题。
可以看出,目前国内外学者更多地研究单级弹道优化问题,较少涉及弹道全局优化问题。本文以两级重复使用运载器为对象[6],针对弹道多段分支等特点,提出两级全局优化方法,通过构造两层优化框架,完成通用的多段分支弹道优化。
1 弹道优化模型
根据多段分支弹道优化模型[7-11]得到其原始框架,如图2所示。各段弹道之间有着十分紧密的联系,通过交班点互相耦合,且交班点同时作为各段弹道的起始条件或终端约束。

图2 多段分支弹道优化原始框架Fig.2 The original optimization framework of the branching trajectory
多段分支弹道优化问题可描述为如下形式:
s.t.
(1)
式中:J为全局目标函数,x为设计变量,下标n表示弹道段数量;Ji,ωi,ui,si,xi,ci分别为第i段弹道的优化目标函数、目标权重、控制变量、状态变量设计变量和约束条件;mi,H_ point_ j,ui,H_ point_ j,si,H_ point_ j分别表示第i段弹道在第j个交班点处的飞行器质量、控制变量和状态变量。
1) 优化目标
对于复杂任务飞行器,各段弹道优化目标可能不同。例如:某些弹道段需快速完成飞行任务,其优化目标可为时间最短;而某些弹道需准确完成攻击目标,其优化目标为末端精度最高。因此,弹道全局优化问题是一个典型的多目标优化问题。本文采用加权处理方法实现该多目标优化问题,式(1)中,权重系数ωi的选取可根据各弹道段优化目标对飞行器总体设计关注指标的贡献度而定。一种方法是通过敏感性分析确定总体指标对各段优化目标的敏感因子,由敏感因子大小相对值确定权重;另一种方法是根据设计者的经验和偏好确定权重因子。
2) 设计变量
弹道全局优化由于存在交班点j,交班点的选取会影响弹道的优化目标。故设计变量中,除各段弹道的控制变量ui和状态变量si外,还有交班点处控制变量和状态变量ui,H_ point_ j,si,H_ point_ j。
3) 约束条件
首先,各段弹道于交班点处控制变量和状态变量应平滑连接,此时交班点处控制变量和状态变量应满足式(1)约束条件中前两个等式约束。其次,各段弹道分支之前质量应为弹道分支之后质量之和,如式(1)约束条件中第三个等式约束。另外,各段弹道也存在相应约束条件,如式(1)约束条件中后三个不等式约束。
针对此类多段分支弹道优化问题,其分支交班点和各弹道段控制变量、状态变量的优化为强耦合优化问题,传统弹道优化直接法和间接法[12]均难以解决。本文提出两级全局弹道优化方法,以解决该优化问题。
2 弹道优化方法
2.1两级全局弹道优化
本文提出适于多段分支两级全局弹道优化方法,集成各段弹道子级优化问题,将交班点耦合变量中质量变量转化为子级局部变量,其它状态变量转为系统级设计变量,实现同层级优化器之间的耦合解耦,以求解各最佳交班点;同时通过引入控制变量一阶导,将其转为系统级协调变量,实现各段控制变量的光滑过渡。

图3 解耦后的两级全局弹道优化框架Fig.3 De-coupled bi-level global optimization framework
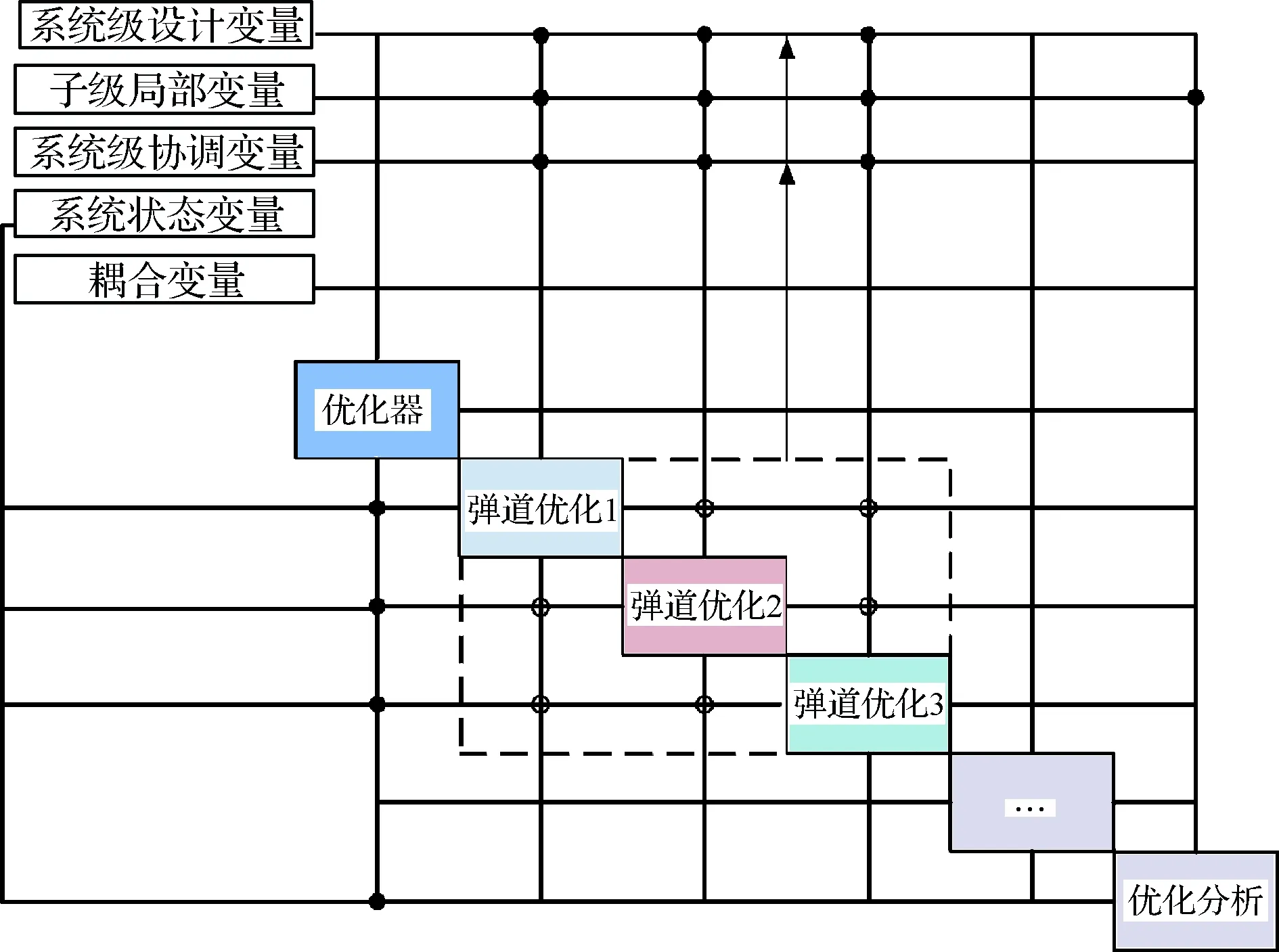
图4 两级全局弹道优化问题的设计结构矩阵Fig.4 The design structure matrix of the two level global trajectory optimization

s.t.
(2)
(3)
优化框架如图3所示,设计结构矩阵如图4所示,系统级优化问题为式(2)所示,子级优化问题为式(3)所示。
2.2弹道优化方法
2.2.1 动力学方程
本文各段弹道采用下式所示的动力学方程:
(4)
式中:V为速度,t为飞行时间,P为推力,α为攻角,FX为阻力,m为质量,g重力加速度,θ为弹道倾角,σ为倾侧角,FY为升力,ψ为弹道偏角,X为纵程,Y为高度,Z为侧向距离,ms为燃料质量流量,α为攻角。
升力和阻力可按下式计算
(5)
式中:q为飞行动压,S为参考面积,Cx和Cy则分别表示升力系数与阻力系数。
推力P=Isms,Is为发动机的比冲,与马赫数Ma、高度Y、攻角α和燃油当量比φ等参数相关。
2.2.2 各段弹道优化方法
各段弹道优化方法可采用间接法或直接法。间接法运用庞特里亚金极大值原理和经典变分法中的拉格朗日乘子法求出最优控制问题的必要条件,然后用其它数值方法求解获得最优变量。直接法则首先将最优控制问题转化为参数最优化问题,后应用参数最优化方法求解最优变量。考虑到本文所研究多段分支弹道全局优化问题的复杂性,重点介绍Hp自适应伪谱法[13-14]。
Hp自适应伪谱法将弹道优化问题的积分区间[t0,t1]转换到区间[-1, 1],对时间变量t作变换:
(6)
取N阶Legendre-Gauss(LG)点以及τ0=-1作为节点,构成N+1个Lagrange插值多项式,并以此为基函数构造控制变量和状态变量的近似表达式,即:
(7)
(8)
采用微分近似矩阵将动力学微分方程约束转换为代数约束方程:

(9)
将终端约束条件离散,并通过Gauss点上的Gauss权重,终端约束可表示为:
(10)
边界约束可表示为:
φ(X0,t0,Xf,tf)=0
(11)
过程约束可表示为:
C(Xk,Uk,τk;t0,tf)≤0,k=1,…,N
(12)
3 算例
3.1问题描述
本文算例[6]的研究对象为两级重复使用运载器,下面级动力形式为RBCC发动机,上面级动力形式为液体火箭发动机,燃料均为液氧/煤油。根据运载器的飞行任务,规划其任务剖面如图5所示。其弹道设计是图1(a)所示的多段分支弹道优化问题,包含下面级上升段、上面级上升段和下面级返回段3个弹道段:水平起飞,随即将上面级以Ma8投送至50 km高空,然后两级分离,下面级返回原场,上面级再将2 t有效载荷以7800 m/s速度投送至200 km高空,此时满足入轨角度约束,弹道倾角为0°。

图5 两级入轨重复使用运载器任务剖面Fig.5 The mission profile of two-stage-to-orbit reusable launch vehicle
全局弹道优化问题说明如下:起飞条件为马赫数0.4、攻角15°,终止条件为完成飞行任务,未端能量管理(Terminal area energy management,TAEM)界面条件为Ma2.5、高度15 km。
3.2两级全局弹道优化
该算例中系统级设计变量为分离点的马赫数、高度、弹道倾角和纵程,系统级协调变量是攻角。系统级采用序列二次规划优化算法求解。各段弹道局部变量包括攻角、倾侧角控制量、质量,优化方法采用Hp自适应伪谱法。
3.2.1 系统级优化模型
系统级优化数学模型如下所示:
式中:m01、m02和m03分别为3段弹道运载器初始质量;mend 1、mend 2、mend 3分别为3段弹道结束时的质量;r为运载器质量在各弹道之间的约束关系;V、θ、X、Y和α分别为交班点速度、弹道倾角、纵程、高度和攻角。各系统级优化变量取值范围如表1所示。
考虑到经济效益,运载器总体设计关注的是如何最小化起飞总质量。该算例中3段弹道优化目标均取弹道燃料消耗最小,即:
(14)
由于各段弹道燃料消耗对起飞总质量的影响程度相当,因此定义各段权重系数相等,即ω1=ω2=ω3=1/3,则系统级优化目标是minJ=1/3(J1+J2+J3),等价于起飞质量m01最小。

表1 系统级优化变量取值范围Table 1 The value range of design variable
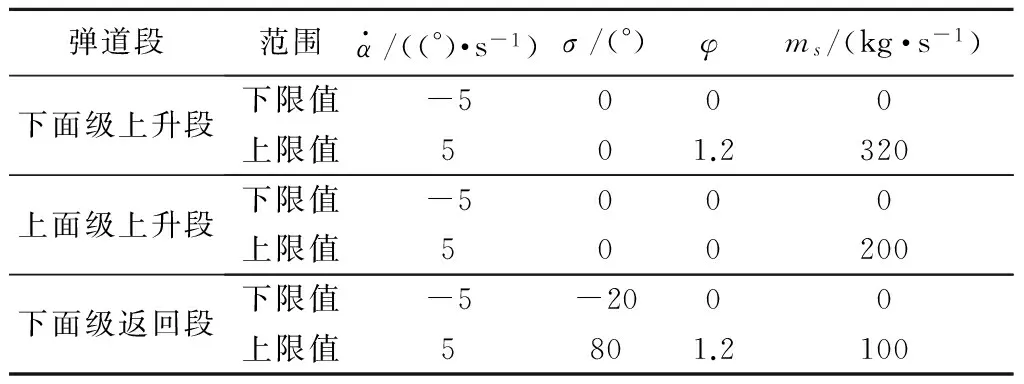
表2 控制变量取值范围Table 2 The value range of control variable
3.2.2 子级优化模型
各段弹道工作模态控制变量为攻角α、火箭燃料质量流量ms和燃油当量比φ,其取值范围如表2所示。对于状态变量,包括速度V,弹道倾角θ,纵程X,高度Y,质量m,运载器上一工作模态的终端值为下一工作模态的初始值。

3.3结果分析
3.3.1 计算结果
部分迭代计算结果如图6~9所示,两级全局弹道优化迭代计算至100步,计算终止。最优解如图中“空心方形点”所示,图中水平虚线为优化变量变化限制曲线。
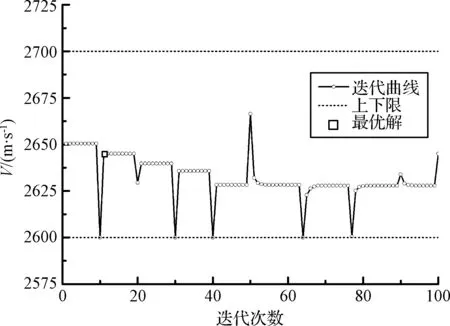
图6 速度迭代历程Fig.6 The iteration history of velocity
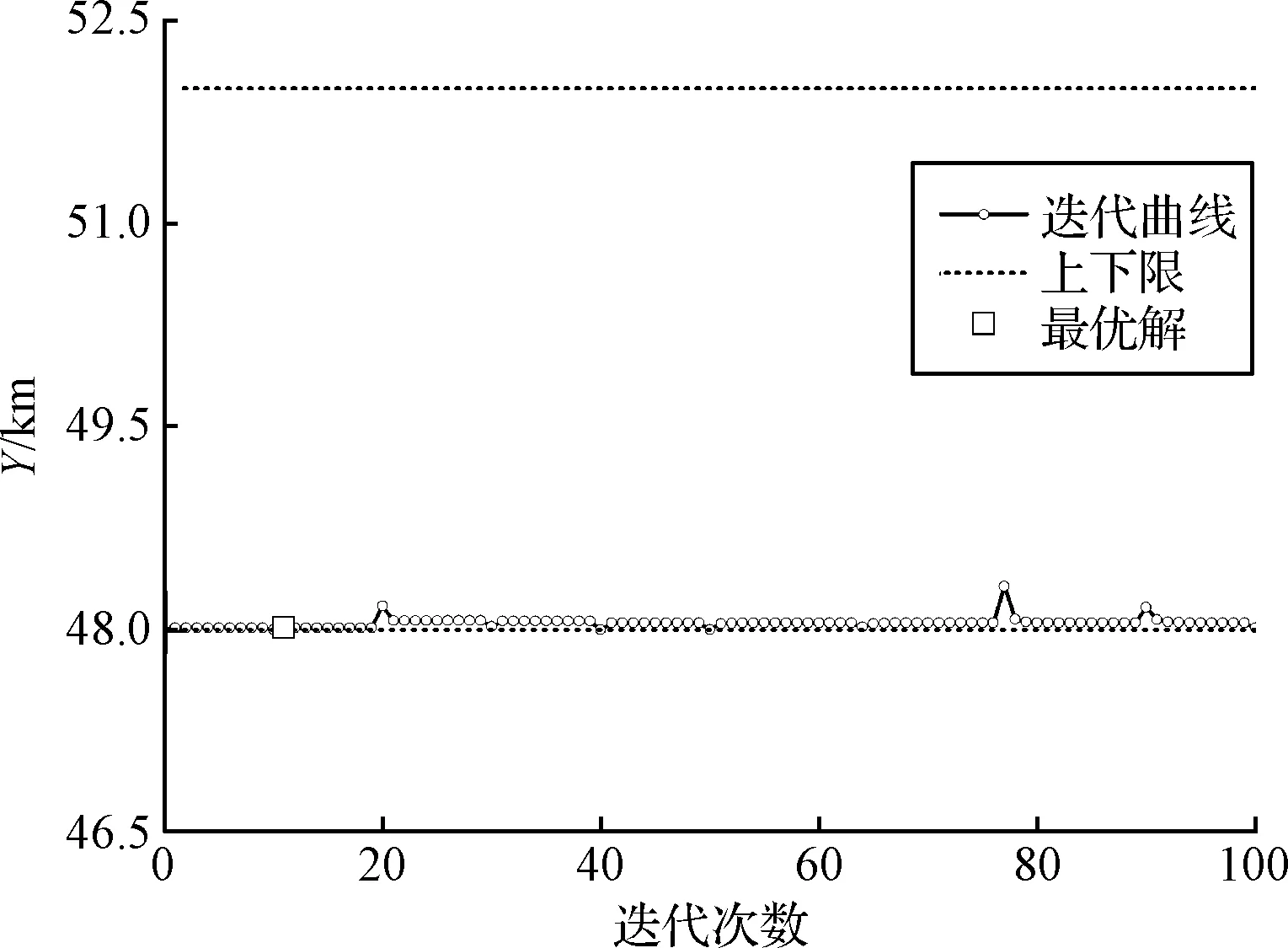
图7 高度迭代历程Fig.7 The iteration history of altitude
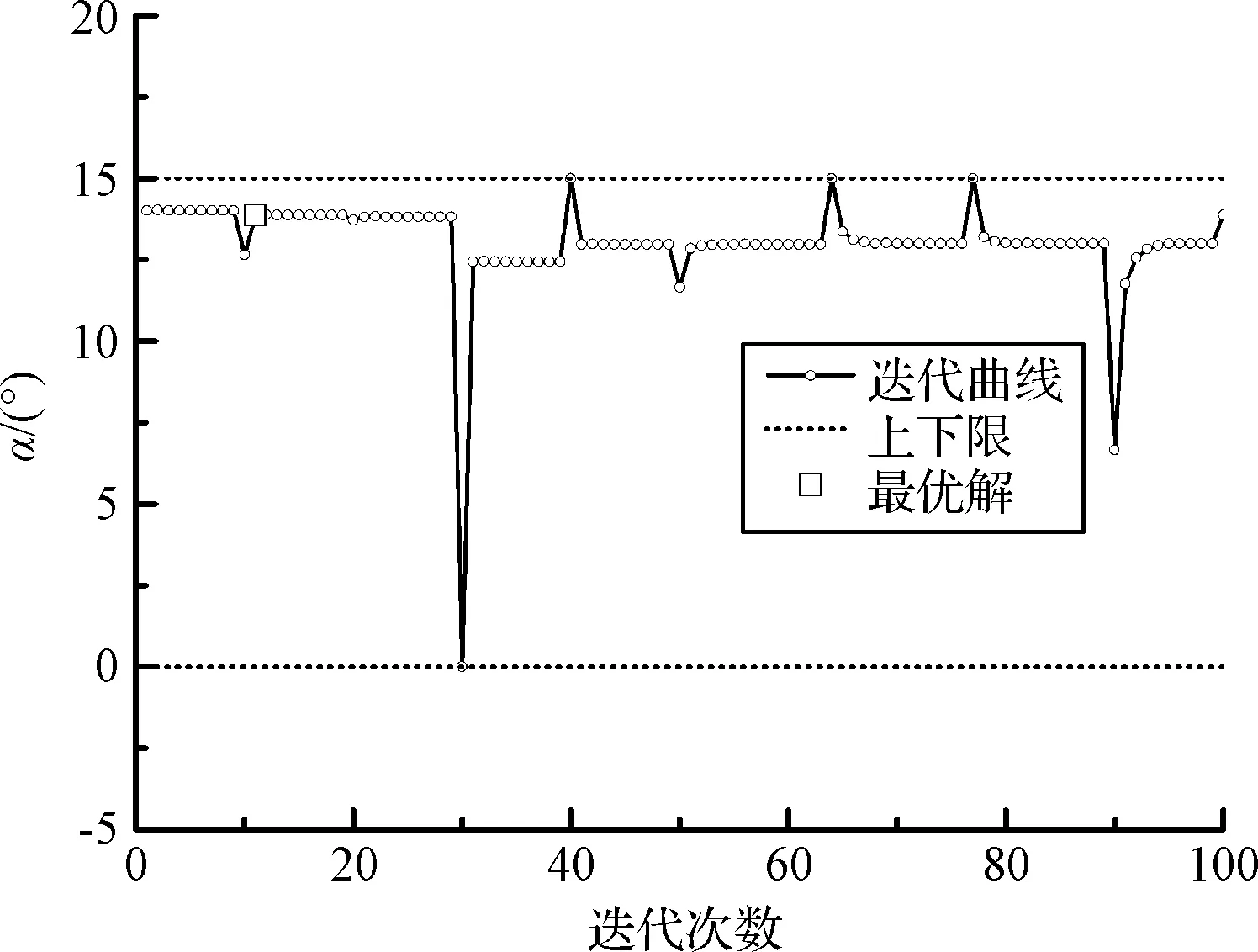
图8 攻角迭代历程Fig.8 The iteration history of angle of attack

图9 目标函数迭代历程Fig.9 The iteration history of objective
3.3.2 结果分析
本文对比研究了两级全局弹道优化和基于固定分离点的弹道优化方法。两者的不同在于是否在各段弹道优化的同时考虑交班点(分离点)的优化。首先根据迭代设计结果,确定固定分离点参数,采用Hp自适应伪谱法优化各段弹道,得到的全程弹道优化结果如图10所示。

图10 基于固定分离点的弹道优化结果Fig.10 The optimization result based on fixed separation point
采用本文的两级优化方法则同时优化各段弹道控制参数和交班点,得到了如图11所示的全局优化弹道。
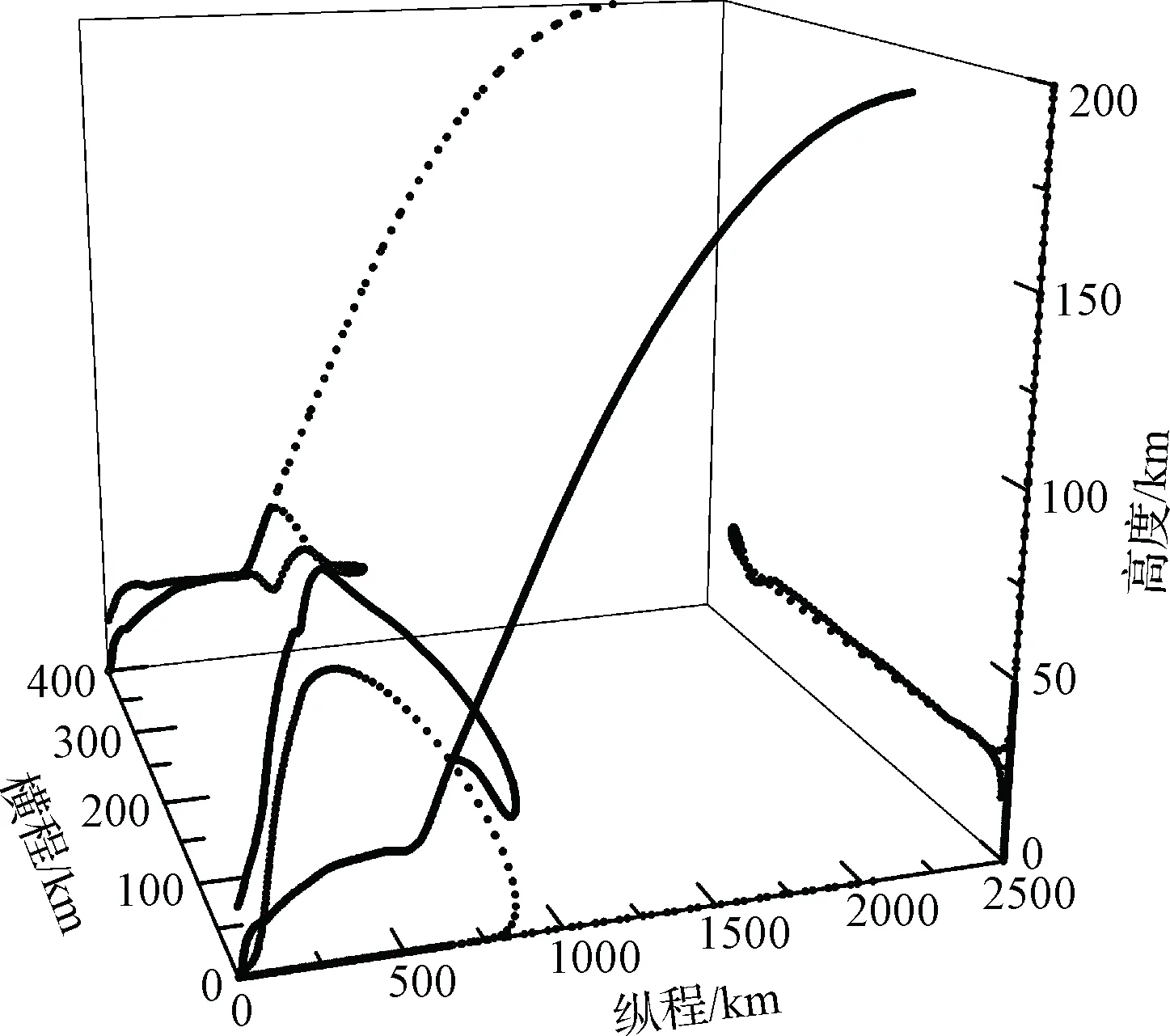
图11 两级全局弹道优化结果Fig.11 The trajectory result based on bi-levelglobal optimization
从表3的对比可以看出,采用本文方法得到的交班点与初始选择的交班点有较大差异。
进一步对比全程弹道及对应的攻角曲线,如图12和图13所示。可以看出,由于分离点的不同,虽然两者弹道形状相似,但控制规律差异明显,决定了目标函数差异较大,也表明了各弹道段和交班点同时优化的必要性。
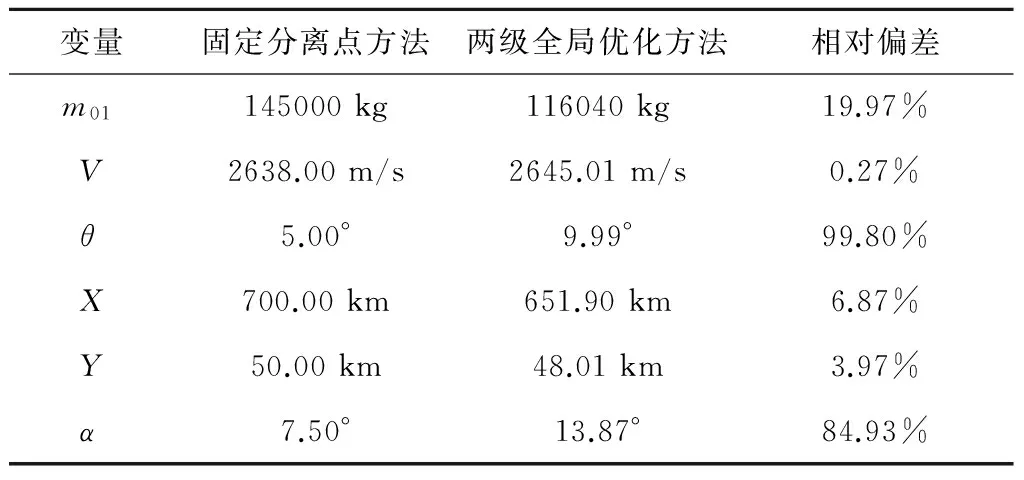
表3 优化结果对比Table 3 The comparison of the optimization results

图12 两种方法弹道优化结果对比Fig.12 The comparison of the optimal trajectory
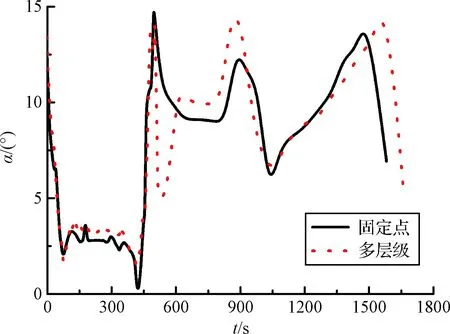
图13 下面级全程攻角曲线对比Fig.13 The comparison of angle of attack of the lower stage
计算结果表明:
1) 两级全局弹道优化中同层级耦合解耦,求解得到各最佳交班点,与基于固定分离点的全程弹道优化相比,速度增大,弹道倾角增大,纵程减小,高度减小,攻角增大。这是因为对于交班点速度,最优点并非在边界上。若速度太大,则下面级上升段燃料消耗质量增大,上面级燃料消耗质量减小;若速度太小,则相反。对于交班点弹道倾角,上面级对弹道倾角的敏感性较大,初始弹道倾角会直接影响上面级爬升的能力,也就会影响上面级燃料消耗质量。对于交班点纵程,最优点在边界上,表明交班点纵程小更优,下面级上升段和返回再入段燃料消耗质量均减小;对于交班点高度,最优点也并非在边界上,若高度太大,则下面级无论上升段还是返回再入段,燃料消耗质量均较大,但上面级燃料消耗质量较小,若高度太小,则相反;对于交班点攻角,其对最佳交班点的选取与弹道倾角相同,均趋于最大值,上面级对攻角的敏感性较大,较大的初始攻角会减小其燃料消耗质量。
2) 将控制变量攻角转化为系统级协调变量,保证了攻角的大小和变化,有效解决了多段分支攻角不连续等问题,攻角一阶导绝对值最大仅为3.29°/s,为控制器实现提供良好的基础。
3) 两级全局弹道优化中两级运载器起飞质量116.04 t,下面级质量103.18 t,上面级质量12.86 t;下面级上升段弹道燃料消耗质量为60.47 t,上面级弹道燃料消耗质量为9.16 t,下面级返回再入段弹道燃料消耗质量为2.72 t;与基于固定分离点全程弹道优化相比,起飞质量减小19.97%。
4 结 论
本文考虑到弹道优化的多目标性,提出两级全局弹道优化方法,通过构造两层优化框架,完成通用的多段分支弹道优化,得到以下结论:
1) 算例表明所提方法可有效解决多段分支弹道优化问题,系统级和子级所有设计变量、约束条件均满足设计要求。
2) 同层级耦合解耦可有效求解各段分支最佳交班点,系统级协调变量可保证交班点控制变量和状态变量的平滑过渡。
3) 所提方法同样可推广应用于其它各类差异性较大的多段分支弹道优化设计,通用性较强、灵活性较大。
[1] Doug N. Qualitative and quantitative assessment of optimal trajectories by implicit simulation (OTIS) and program to optimize simulated trajectories (POST) [D].Georgia: Georgia Institute of Technology, 2001.
[2] Chudej K, Bulirsch R. Numerical solution of a simultaneous staging and trajectory optimization problem of a hypersonic space vehicle[C]. The 5th International Aerospace Planes and Hypersonic Technologies Conference, Munich, Germany, November 30-December 3, 1993.
[3] Christophe B. Two-stage airbreathing trajectory optimization with first-stage return[C]. The 4th Symposium on Multidisciplinary Analysis and Optimization, Cleveland, USA, December 1-4, 1992.
[4] Ledsinger L A, Olds J R. Optimized solutions for Kistler K-1 branching trajectories using multidisciplinary design optimization techniques [J]. Journal of Spacecraft & Rockets, 2015, 39(3):420-429.
[5] Ledsinger L A, Olds J R. Multidisciplinary design optimization techniques for branching trajectories[C]. The 7th AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, St. Louis, USA, September 2-4, 1998.
[6] 龚春林, 韩璐, 谷良贤. 适应于RBCC运载器的轨迹优化建模研究[J]. 宇航学报, 2013, 34(12):1592-1598. [Gong Chun-lin, Han Lu, Gu Liang-xian. Research on modeling of trajectory optimization for RBCC-powered RLV[J]. Journal of Astronautics, 2013, 34(12):1592-1598.]
[7] 王振国, 陈小前, 罗文彩,等.飞行器多学科设计优化理论与应用研究[M]. 北京: 国防工业出版社, 2004.
[8] Hulme K F, Bloebaum C L. A comparison of solution strategies for simulation based multidisciplinary design optimization[C]. The 7th AIAA/USAF/NASA/ISSMO Symposium on Multi-disciplinary Analysis and Optimization, St. Louis, USA, September 2-4, 1998.
[9] Perez R, Liu H, Behdinan K. Evaluation of multidisciplinary optimization approaches for aircraft conceptual design[C]. The 10th AIAA/ISSMO Multi-disciplinary Analysis and Optimization Conference, Albany, USA, August 30-September 1, 2004.
[10] Qu X, Zhang R, Liu B, et al. An improved TLBO based memetic algorithm for aerodynamic shape optimization[J]. Engineering Applications of Artificial Intelligence, 2017, 57(1):1-15.
[11] Qu X, Li H, Zhang R. An effective TLBO-based memetic algorithm for hypersonic reentry trajectory optimization[C]. 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, Canada, July 24-29, 2016.
[12] Betts J T. Survey of numerical methods for trajectory optimization[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(2): 193-206.
[13] Gill P E, Murray W, Saunders M A. User’s guide for SNOPT version 7: software for large-scale nonlinear programming[R]. San Diego, USA: University of California, April 2008.
[14] Gill P E, Murray W, Saunders M A. SNOPT: an SQP algorithm for large scale constrained optimization[J]. SIAM Journal on Optimization, 2002, 12(4): 979-1006.
Bi-LevelGlobalOptimizationMethodforMulti-BranchingTrajectory
GONG Chun-lin, ZHU Zheng-guang, CHEN Bing, SU Hua, GU Liang-xian
(Shanxi Aerospace Flight Vehicle Design Key Laboratory, School of Astronautics, Northwestern Polytechnical University, Xi’an 710072,China)
To solve the problems of the staging point selection and control variables jumping faced during design of the multi-branching trajectory, a bi-level global optimization method is proposed. In the given method, the sub-level optimization problem is set up for each trajectory section, and the system level optimization problem is set up to coordinate the coupling variables of the staging point. For these coupling variables, the mass variable is transformed to the local variable of the sub-level optimization problem, and other state variables are transformed as the global variables of the system level optimization problem. By this strategy, the couplings between the sub-level optimizations are decoupled hierarchically, and the optimal staging point can be obtained. Meanwhile, the first-order derivatives of control is introduced as the system-level coordinating variables to ensure the smooth transition of the control variables between the trajectory sections. The global trajectory optimization problem of a two-stage-to-orbit reusable launch vehicle is tested. The results show that the provided method is able to transform the highly coupled trajectory optimization problem into the simple and efficient bi-level optimization formulation, therefore can support the design of the multi-branching trajectory.
Multi-branching trajectory; Trajectory optimization; Bi-level global optimization; Staging point
V412.1
A
1000 -1328(2017)09- 0903- 08
10.3873/j.issn.1000-1328.2017.09.002
2017- 03-17;
2017- 07- 02
民用航天项目(D010403);中央高校基本科研业务费专项资金(G2016KY0302);总装预研基金(9140A20100111HK0318)
龚春林(1980-),男,博士,副教授,主要研究方向为飞行器总体设计。
通信地址:陕西省西安市友谊西路127号249信箱(710072)
电话:(029)88492783
E-mail:leonwood@nwpu.edu.cn
猜你喜欢
计算机仿真(2021年4期)2021-11-17
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
软件(2020年7期)2020-12-24
智能计算机与应用(2020年10期)2020-03-18
健康大视野(2019年20期)2019-11-12
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
健康必读·下旬刊(2018年10期)2018-12-26
汽车零部件(2018年8期)2018-09-06