履带式机器人的稳定性分析
2017-10-14 09:34林伟芬龙石锋
科学与财富 2017年28期
林伟芬+龙石锋
摘 要:从工业革命到21世纪以来,科学技术的发展使得我们人类对于机器人这一方面的研究深入,履带式移动机器人在各方面的优点日益明显。如当我们在从事一些危险的工作时,如勘测排爆反恐等,我们可以利用机器人来安全有效的展开工作。同时机器人的产生节约了劳动力,提高了工作的效率。在爬坡跨越障碍和过一些危险地段时,履带式机器人体现出它的优越之处,因此在部队、公安、消防、工业及人员生命救助等方面有着广泛的应用。
关键词:履带式;机器人;稳定性
机器人的稳定性分析
履带式机器人行进时,当遇到斜坡或者平面上一些比较凹凸不平的地面时,它的行进将会受到阻碍,能否保持稳定是履带式机器人研究的基础和前提。因此,分析其稳定性是履带式机器人这项研究的一个重要环节。
履带式机器人的稳定性含义:在平面和一定的斜面上,履带式机器人能保证不随意滑动或者翻倒且能保持在一个稳定的状态的性能。所以对于履带式机器人来说,它的稳定性是至关重要的。机器人的稳定性分析分为两个方面,一个是横向稳定性分析,另一个则是纵向稳定性分析。下面我们来做具体的分析。
横向稳定性
履带式机器人的横向稳定性是指机器人在斜坡上是否沿着横坡滑动或者横向倾翻。当机器人不发生上述情况时说明此时的横向稳定性较好。当机器人在斜坡上保持稳定时,它的受力情况如图所示。
B——机器人两导轨的轨距
B——机器人履带的接地宽度
Β——横坡角度
E——机器人重心离开纵向的垂直面的偏移距离
Y1 , Y2——两履带受到的地面垂直反力
Z1, Z2——地表作用于履带上的与坡面平行的力
当机器人在斜坡上刚好沿向横向翻倾时,我们选择这一临界状态进行分析,此时机器人的右侧不再受力,所以地面反力Y1为零。而此时整个机器人都往它的左边履带压,使得它的重力对其左边的履带的下边缘作用,此时我们对地面反力Y2取矩可知:
由上式可得到机器人的横向极限坡度角 为:
当机器人开始横坡下滑时,有
由上式可得到:
——履带式机器人在水平方向上的附着系数。
由上式可以得出履带式机器人在斜坡上不发生横向滑动的条件是:履带机器人的横向附着系数应大于横坡角的正切值。
通过对机器人的稳定性分析我们可以得总结出这一结论:履带式机器人的稳定性受到它自身的总体大小和尺寸以及机器人重心的位置的影响(不包括其他因素对其稳定性造成的影响)。因此,在实际的机器人研究中,如果想要使履带式机器人的稳定性更好,合理设计机器人的尺寸和大小以及调整好它的重心位置是一个比较可行的方法。
纵向稳定性
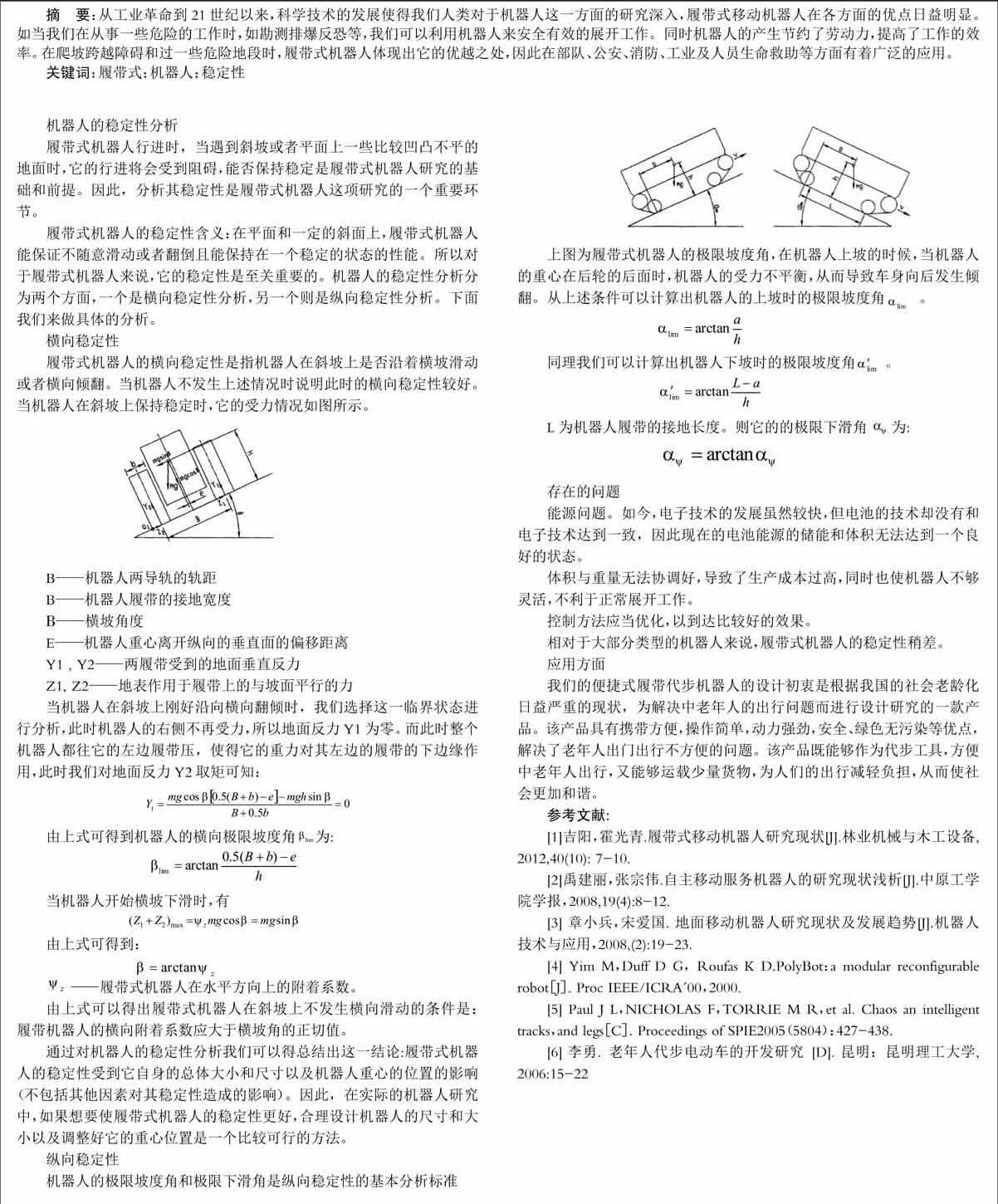
机器人的极限坡度角和极限下滑角是纵向稳定性的基本分析标准
上图为履带式机器人的极限坡度角,在机器人上坡的时候,当机器人的重心在后轮的后面时,机器人的受力不平衡,从而导致车身向后发生倾翻。从上述条件可以计算出机器人的上坡时的极限坡度角 。
同理我们可以计算出机器人下坡时的极限坡度角 。
L为机器人履带的接地长度。则它的的极限下滑角 为:
存在的问题
能源问题。如今,电子技术的发展虽然较快,但电池的技术却没有和电子技术达到一致,因此现在的电池能源的储能和体积无法达到一个良好的状态。
体积与重量无法协调好,导致了生产成本过高,同时也使机器人不够灵活,不利于正常展开工作。
控制方法应当优化,以到达比较好的效果。
相对于大部分类型的机器人来说,履带式机器人的稳定性稍差。
应用方面
我们的便捷式履带代步机器人的设计初衷是根据我国的社会老龄化日益严重的现状,为解决中老年人的出行问题而进行设计研究的一款产品。该产品具有携带方便,操作简单,动力强劲,安全、绿色无污染等优点,解决了老年人出门出行不方便的问题。该产品既能够作为代步工具,方便中老年人出行,又能够运载少量货物,為人们的出行减轻负担,从而使社会更加和谐。
参考文献:
[1]吉阳,霍光青.履带式移动机器人研究现状[J].林业机械与木工设备,2012,40(10): 7-10.
[2]禹建丽,张宗伟.自主移动服务机器人的研究现状浅析[J].中原工学院学报,2008,19(4):8-12.
[3] 章小兵,宋爱国. 地面移动机器人研究现状及发展趋势[J].机器人技术与应用,2008,(2):19-23.
[4] Yim M,Duff D G, Roufas K D.PolyBot:a modular reconfigurable robot[J]. Proc IEEE/ICRA'00,2000.
[5] Paul J L,NICHOLAS F,TORRIE M R,et al. Chaos an intelligent tracks,and legs[C]. Proceedings of SPIE2005(5804):427-438.
[6] 李勇.老年人代步电动车的开发研究[D]. 昆明:昆明理工大学,2006:15-22
猜你喜欢
数学物理学报(2021年5期)2021-11-19
石油沥青(2021年4期)2021-10-14
金桥(2019年10期)2019-08-13
数学物理学报(2018年1期)2018-03-26
厦门理工学院学报(2016年1期)2016-12-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
山西大同大学学报(自然科学版)(2014年6期)2014-01-23
郑州大学学报(理学版)(2012年4期)2012-03-25