农机导航自校正模型控制方法探讨
2017-10-18 04:58陈志学
时代农机 2017年8期
陈志学
(杜集区农林水利局,安徽杜集235000)
农机导航自校正模型控制方法探讨
陈志学
(杜集区农林水利局,安徽杜集235000)
随着科学技术的发展,农业生产中科学技术应用水平越来越高,农业生产逐渐的朝着精准农业方向发展,农业自动导航作为精准农业生产技术体系发展中的重要构成,对于农业生产整个过程都有着积极地推动作用,文章从运动学模型的角度对农机导航自校正模型控制进行了简要分析。
农机导航;自校正模型;模型控制
1 农业导航自校正模型控制构成
农业导航自校正模型属于精准农业农机自动导航控制技术的一种特殊形式,目前来说对于精准农业自动导航控制技术的要求不仅仅局限在控制方法的研究方面,有很多都已经渗入到了对技术模型控制方法的方向。文章提出的农机导航自校正模型首先从控制器的角度来看主要分为两个环节,分别是技术模型控制器以及自校正控制器,其中自校正控制器主要是用来设定农机设备的位置,模型控制器主要设定农机设备的航向,模型控制器是整个自校正模型的核心控制器,自校正控制器是自校正模型中的辅助设备,其控制思想一方面具备模型控制的先天优势,另一方面可以降低不精确模型对控制质量的影响,可以最大限度地提升农机导航的精确性。
2 模型控制器设计
(1)农机设备运动学模型。运动学模型的设计首先需要抛开农机设备车轮和地面的摩擦作用、无侧滑侧倾作用,其次这种条件下就可以将相应的农机设备例如农用拖拉机等四轮设备当做是二轮模型来考虑,具体的模型如图1所示,图1中O是运动学模型控制点,M是距离这个点最近的位置,以此为基础,同时结合几何物力规律得出以下公式(1)模型微分方程:
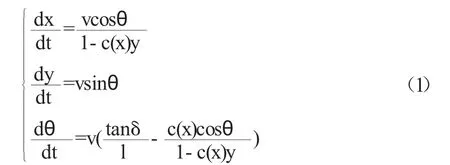

图1 农机设备运动学模型
式(1)中,θ为农机设备的航向偏差角度;X为M沿着曲线的横坐标;l为农机设备轴距;y为设备横向偏差;V为设备纵向行驶的实际距离;c(x)为曲率。
(2)模型控制器控制律。根据这个模型再借助虚拟控制选择具体的设备运动状态变量可以得出控制器的二维空间状态模型,如下所示:

再结合线性理论选择具体的参数K=[k1k2],然后按照极点配置原则对设备状态进行反馈,最终来计算控制器零点逐渐稳定的控制律,这个过程中可以对模型控制器系统稳定性以及速度产生影响的是k1和k2比值,双方成反比关系,k1和k2比值越大其控制器稳定性越差,但是速度越快。
3 农机设备自校正控制器设计
上面得出的结论可以看出在直线路径以及小曲率的跟踪过程中,模型控制器实际的跟踪效果非常好,但是相反的对于大曲率情况来说,实际的跟踪效果却并不理想,所以对于模型控制器实际的控制效果评价还需要依靠效果监测和预测吻合度来进行,吻合度参数为sdy(控制器偏差变化趋势变量),这个过程中需要获取监测时刻的横向偏差数值以及一定监测时间段内的横向偏差数值,对于时间段内的偏差数值需要根据经验来获取,横向偏差数值取值较小的情况下,设备自校正控制器会表现出较快的反应速度,与此同时模型控制系统的整体稳定性会下降,相反横向偏差数值较大的情况下,反应速度会下降,但是系统稳定性会大幅度的提升,通过反复的偏差变化趋势实验,最终得出时间控制在1.2s的时候系统稳定性和反应速度的整体效果最佳。
(1)输入变量和输出变量的模糊化。这里设计的农机设备自校正控制器一共有两个输入变量和一个输出变量,输入变量一个是上面提到的sdy(控制器偏差变化趋势变量),另一个是y(横向的偏差变量);输出变量主要是农机设备转向轮期望的补偿角度,两个变量的模糊化过程就是利用数字来体现输入变量模糊化序数,根据横向偏差、控制器偏差变化趋势变量以及农机设备转向轮期望的补偿角度量化等级以及量化因子取值将这三个变量的模糊化等级以及隶属度函数用图2来表示:
其中图2中曲线分别表示三个变量的模糊等级,分别为负大、负中、负小、零、正小、正中和正大。

图2 横线偏差隶属度函数
(2)自校正控制器控制规则。对于农机设备自校正控制器的设计需要考虑到设备驾驶人员的驾驶经验,具体的原则:根据偏差隶属度函数,当实际的偏差绝对值比较大的情况下,控制量尽量减小偏差,当实际的偏差绝对值较小的情况下,一方面要减小实际偏差,另一方面还要顾及到控制系统的稳定性,当横向偏差绝对值变化情况不断增加的时候,设备导航自校正控制器需要用设备转向轮期望的补偿角度来对模型控制实际输出进行控制校正,通过偏差校正让农机设备朝着横向偏差较小的趋势运动,当横向偏差绝对值变化趋势不断减小的时候,这种情况下实际的控制效果和预期的控制效果基本上可以保持一致,所以设备自校正模型控制器输出的量要相应的使用小角度进行调节,当然这种情况下也可以不调节控制器输出。
根据图2,当农机设备位于导航控制线右侧的时候,横向的偏差表示为NB,并且这种趋势还会不断增加,这种情况下显示的控制效果和预期的效果偏差较大,所以设备打破校正控制器需要输出PB(正大)最大的转向期望补偿角来对设备转向轮期望转角进行校正,让农机设备开始朝着正确的导航方向移动,结合图2将自校正控制器控制规格描述为:如果横向偏差变量为负大,并且控制器偏差变化趋势变量也为负大,那么农机设备转向轮期望的补偿角度需要取正大。
总的来说,文章提出的农机导航自校正模式控制方法是从曲线路径跟踪方面存在的诸多问题进行入手,对模型控制器以及自校正控制器进行设计研究,不仅可以提升导航的精确度和稳定性,同时还可以减小不精确模型产生的不良影响。
[1]张闻宇.基于双切圆寻线模型的农机导航控制方法[J].农业机械学报,2016,47(10):1-10.
[2]伟利国.农机导航多模变结构智能控制方法研究[D].北京:中国农业机械化科学研究院,2015.
[3]白晓平,刘晓光.农机导航自校正模型控制方法研究[J].农业机械学报,2015,46(2):1-7.
陈志学(1973-),男,安徽淮北人,大学专科,工程师,主要研究方向:农业机械化。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
学生天地(2020年6期)2020-08-25
现代装饰(2020年7期)2020-07-27
数学年刊A辑(中文版)(2020年2期)2020-07-25
国学(2020年1期)2020-06-29
运筹与管理(2019年10期)2019-12-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
系统医学(2016年8期)2016-02-20
电子设计工程(2014年18期)2014-02-27