内模解耦控制及其在热工系统中的应用分析
2017-10-21 21:15吴铖炫
神州·上旬刊 2017年10期
吴铖炫

摘要:伴随着我国社会经济的长效发展,在工业领域当中开始出现了大批容量极大的火电机组,而控制热工系统的要求也随之不断提高。目前在生产火电机组当中最常使用的控制方法便是PID控制法,但其对于控制对象具有一定的要求,如果控制对象的特性相对比较复杂,则PID控制法将很难充分发挥自身效用。因此本文将通过结合内模控制和逆向解耦的的思想,对应用在热工系统当中的内模解耦控制进行简要分析研究。
关键词:内模解耦控制;热工系统;逆向解耦
引言:
在现阶段我国火电机组的热工系统当中主要包括给水和燃烧系统、汽温系统、机炉协调系统等在内的若干系统,而不同的系统在控制过程中也有着截然不同的控制要求,加之热工控制对象通常具有较强的耦合,以及大延迟和惯性等特征,因此也在很大程度上增加了热工系统的有效控制难度。为此,本文将通过立足内模解耦控制的角度,通过对其在热工系统中的实际应用进行探究,希望能够为相关研究人员提供相应参考。
一、逆向解耦与内模控制的简要概述
(一)逆向解耦
在常规的串联解耦方法当中,即可高度概括解耦器的设计。在这一公式当中,G(s)和GV(s)代表着被控对象传递函数矩阵和解耦控制器矩阵。而Q(s)则代表着经过解耦之后的期望矩阵[1]。而通过前馈不变性的原理则可以直接将解耦控制器划分成直接和反馈通道,下图展示的就是多变量系统在解耦之后的具体结构:
图1 多变量系统在解耦之后的结构示意图
通过根据逆向解耦控制原理我们可以得知,与此同时,而在这一公式当中实际控制量,而在完成解耦之后虚拟控制量则为,被控量为。逆向解耦最大的特点在于其无需对对象矩阵的逆进行求解便可以有效实现解耦。
(二)内模控制
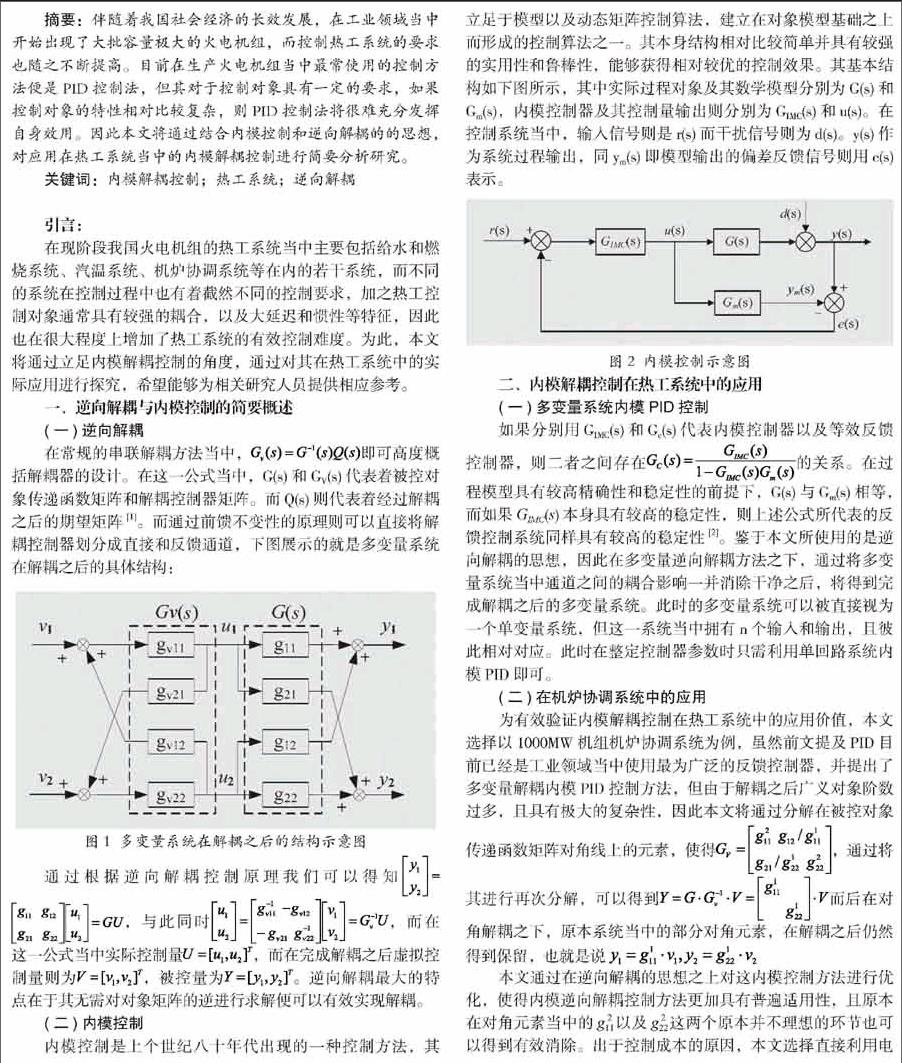
内模控制是上个世纪八十年代出现的一种控制方法,其立足于模型以及动态矩阵控制算法,建立在对象模型基础之上而形成的控制算法之一。其本身结构相对比较简单并具有较强的实用性和鲁棒性,能够获得相对较优的控制效果。其基本结构如下图所示,其中实际过程对象及其数学模型分别为G(s)和Gm(s),内模控制器及其控制量输出则分别为GIMC(s)和u(s)。在控制系统当中,输入信号则是r(s)而干扰信号则为d(s)。y(s)作为系统过程输出,同ym(s)即模型输出的偏差反馈信号则用e(s)表示。
图2 内模控制示意图
二、内模解耦控制在热工系统中的应用
(一)多变量系统内模PID控制
如果分别用GIMC(s)和Gc(s)代表内模控制器以及等效反馈控制器,则二者之间存在的关系。在过程模型具有较高精确性和稳定性的前提下,G(s)与Gm(s)相等,而如果GIMC(s)本身具有较高的稳定性,则上述公式所代表的反馈控制系统同样具有较高的稳定性[2]。鉴于本文所使用的是逆向解耦的思想,因此在多变量逆向解耦方法之下,通过将多变量系统当中通道之间的耦合影响一并消除干净之后,将得到完成解耦之后的多变量系统。此时的多变量系统可以被直接视为一个单变量系统,但这一系统当中拥有n个输入和输出,且彼此相对对应。此时在整定控制器参数时只需利用单回路系统内模PID即可。
(二)在机炉协调系统中的应用
为有效验证内模解耦控制在热工系统中的应用价值,本文选择以1000MW机组机炉协调系统为例,虽然前文提及PID目前已经是工业领域当中使用最为广泛的反馈控制器,并提出了多变量解耦内模PID控制方法,但由于解耦之后广义对象阶数过多,且具有极大的复杂性,因此本文将通过分解在被控对象传递函数矩阵对角线上的元素,使得,通过将其进行再次分解,可以得到而后在对角解耦之下,原本系统当中的部分对角元素,在解耦之后仍然得到保留,也就是說
本文通过在逆向解耦的思想之上对这内模控制方法进行优化,使得内模逆向解耦控制方法更加具有普遍适用性,且原本在对角元素当中的g112以及g222这两个原本并不理想的环节也可以得到有效消除。出于控制成本的原因,本文选择直接利用电子计算机和相应的仿真建模软件,在计算机中构建起一个虚拟的仿真环境,并在此基础之上将控制对象设定为1000MW机炉,通过设置逆向解耦矩阵,同时在对系统进行有效控制的过程中通过直接使用内模等效PID整定参数。此时在整个机炉协调控制系统当中,功率N以及主汽压力P、中间点焓值H这三个被控制的变量以不发生超调为理想状态[3]。并希望可以有效加快机组功率的相应速度,以此在有效保障机炉协调控制系统正常运行的前提下,可以大大提升其快速性能。而通常情况下,如果此时选择增加滤波器时间常数,将会直接影响机炉协调控制系统的响应速度,并使得超调出现大幅度衰减的情况。但如果此时选择减小滤波器时间常数,则将会有效提升机炉协调控制系统的响应速度,并使得超调出现大幅增加的情况。此后通过整定参数,将滤波器的参数Tf1、Tf2以及Tf3分别设定为30、25和30。此时PID控制参数kp1、kp2和kp3分别为0.016、36.285以及-0.183;而ki1、ki2以及ki3分别为0、0.33和-0.0067;kd1、kd2以及kd3分别为0.086、278.31以及-1.1939。在经过仿真实验之后,机炉协调控制系统当中的干戈被控制变量均能对设定值的变化情况进行全过程的严密跟踪,且具有较好的稳定性和精确性,三个被控制变量能够彼此相互影响相互控制。
结束语:
总而言之,本文通过选择某机炉协调系统,将经过优化处理的逆向内模解耦控制方法运用其中,使得原本困扰变量与变量的耦合影响得到彻底消除,在内模PID控制方法的使用之下,热工控制系统可以有效调整控制器参数,以此实现对热工系统的有效控制。这也证明内模解耦控制确实具有较高的有效性和应用价值,但由于篇幅限制,本文并未对控制算法进行详细的仿真验证,因此在该方面还需要在日后的研究当中继续加强。
参考文献:
[1]杨亚惠.基于内模原理的交叉解耦控制策略研究[J].科技展望,2017,27(21):215-217.
[2]王延年,张帅.内模解耦控制在中央空调系统的应用[J].电子设计工程,2015,23(12):61-63.
[3]曾舒,张花芝,辜俊,丁颖萍.基于内模控制的SSSC前馈解耦控制策略研究[J].四川电力技术,2015,38(05):51-55.endprint